Лекция
Привет, Вы узнаете о том , что такое основы теории автоматического управления, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое основы теории автоматического управления, теория автоматического управления, автоматическое управление, критерий наблюдаемости, критерий управляемости, критерий калмана , настоятельно рекомендую прочитать все из категории Математические основы теории автоматического управления.
теория автоматического управления (ТАУ) — научная дисциплина, которая изучает процессы автоматического управления объектами разной физической природы. При этом при помощи математических средств выявляются свойства систем автоматического управления и разрабатываются рекомендации по их проектированию.
Является составной частью технической кибернетики и предназначена для разработки общих принципов автоматического управления, а также методов анализа (исследования функционирования) и синтеза (выбора параметров) систем автоматического управления (САУ) техническими объектами.
Для этой теории имеет значение только характер преобразований сигналов объектами управления.
Развитие и совершенствование промышленного производства (энергетики, транспорта, машиностроения, космической техники и т.д.) требует непрерывного увеличения производительности машин и агрегатов, повышения качества продукции, снижения себестоимости и, особенно в атомной энергетике, резкого повышения безопасности (ядерной, радиационной и т.д.) эксплуатации АЭС и ядерных установок.
Впервые сведения об автоматах появились в начале нашей эры в работах Герона Александрийского «Пневматика» и «Механика», где описаны автоматы, созданные самим Героном и его учителем Ктесибием: пневмоавтомат для открытия дверей храма, водяной орган, автомат для продажи святой воды и др. Идеи Герона значительно опередили свой век и не нашли применения в его эпоху.
В Средние века значительное развитие получила имитационная «андроидная» механика, когда конструкторы-механики создали ряд автоматов, подражающих отдельным действиям человека, и, чтобы усилить впечатление, изобретатели придавали автоматам внешнее сходство с человеком и называли их «андроидами», то есть человекоподобными. В настоящее время подобные устройства называют роботами, в отличие от широко распространенных во всех сферах человеческой деятельности устройств автоматического управления, которые называют автоматами.
В XIII веке немецкий философ-схоласт и алхимик Альберт фон Больштадт построил робота для открывания и закрывания дверей.
Весьма интересные андроиды были созданы в XVII—XVIII веках. В XVIII веке швейцарские часовщики Пьер Дро и его сын Анри создали механического писца, механического художника и др. Прекрасный театр автоматов был создан в XVIII в. русским механиком-самоучкой Кулибиным. Его театр, хранящийся в Эрмитаже, помещен в «часах яичной фигуры».
В зачаточном виде многие положения теории автоматического управления содержатся в Общей теории (линейных) регуляторов, которая была разработана, в основном, в 1868—1876 годы в работах Максвелла и Вышнеградского. Основополагающими трудами Вышнеградского являются: «Об общей теории регуляторов», «О регуляторах непрямого действия». В этих работах можно найти истоки современных инженерных методов исследования устойчивости и качества регулирования.
Решающее влияние на развитие отечественной методологии исследований теории автоматического управления сыграли работы выдающегося советского математика Андрея Маркова (младшего), основоположника советской конструктивистской школы математики, автора работ по теории алгоритмов и математической логике. Эти исследования нашли применение в научной и практической деятельности академика Лебедева по военной тематике — автоматах управления торпедами и наведения орудий и устойчивости крупных энергосистем.
К началу XX века и в первом его десятилетии теория автоматического управления формируется как общенаучная дисциплина с рядом прикладных разделов.
Автоматика — отрасль науки и техники, охватывающая теорию и практику автоматического управления, а также принципы построения автоматических систем и образующих их технических средств.
Объект управления (ОУ) — устройство, физический процесс либо совокупность процессов, которыми необходимо управлять для получения требуемого результата. Взаимодействие с ОУ происходит путем подачи на его условный вход управляющего воздействия (которое корректирует процессы протекающие в ОУ), при этом на выходе получается измененный параметр (который является процессом-следствием).
Управление — воздействие (сигнал), подаваемое на вход объекта управления и обеспечивающее такое протекание процессов в объекте управления, которое обеспечит достижение заданной цели управления на его выходе.
Цель — желаемое протекание процессов в объекте управления и получение нужного изменения параметра на его выходе.
Объекты:
Система автоматического управления (САУ) включает в себя объект управления и устройство управления.
Устройство управления — совокупность устройств, с помощью которых осуществляется управление входами объекта управления.
Регулирование — частный случай управления, цель которого заключается в поддержании на заданном уровне одного или нескольких выходов объекта управления.
Регулятор — преобразует ошибку регулирования ε(t) в управляющее воздействие, поступающее на объект управления.
Задающее воздействие g(t) — определяет требуемый закон регулирования выходной величины.
Ошибка регулирования ε(t) = g(t) — y(t), разность между требуемым значением регулируемой величины и текущим ее значением. Если ε(t) отлична от нуля, то этот сигнал поступает на вход регулятора, который формирует такое регулирующее воздействие, чтобы в итоге с течением времени ε(t) = 0.
Возмущающее воздействие f(t) — процесс на входе объекта управления, являющийся помехой управлению.
Системы автоматического управления:
Реализация поставленных целей невозможна без внедрения современных систем управления, включая как автоматизированные (с участием человека-оператора), так и автоматические (без участия человека-оператора) системы управления (СУ).
Центральными понятиями курса теории автоматического управления являются понятия управления и системы управления.
Управление - это целенаправленное воздействие на объект (управляемый процесс), приводящее к заданному изменению (или поддержанию) его состояния.
Комплекс ( система ) взаимосвязанных элементов, участвующих в процессе управления называется системой управления.
Введенные понятия иллюстрируются рис. В.1, на котором представлены основные элементы ( блоки ) системы и показан характер их взаимодействия в процессе управления объектом.

Рис. В.1. Система управления
Различают следующие типы объектов и управляемых процессов:
Состояние объекта характеризуется некоторыми количественными величинами, изменяющимися во времени, т.е. переменными состояния (см. п. 3.1.1). В естественных процессах в роли таких переменных может выступать температура, плотность или содержание определенного вещества в организме или среде обитания, объем выпускаемой продукции, курс ценных бумаг и т.д . Об этом говорит сайт https://intellect.icu . Для технических объектов - это механические перемещения (угловые или линейные ) и их скорости, электрические переменные , температуры и концентрации веществ и т.д.
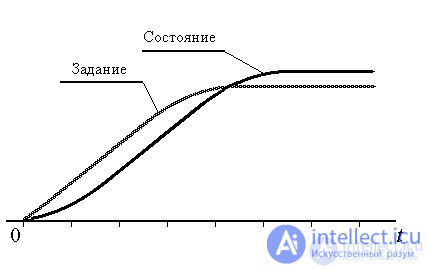
Рис. В.2. Целенаправленное изменение состояния
Целью управления является изменение состояния объекта в соответствии с заданным законом (заданием, рис. В.2). Такое изменение происходит в результате действия внешних факторов, среди которых выделяют
Физически управление объектом реализуется с помощью блоков управления и блоков контроля, а возмущающие воздействия являются результатом влияния внешней среды. Все эти блоки и образуют систему управления.
Блок контроля - это комплекс средств, участвующих в оценивании (идентификации) состояния управляемого процесса и/или внешней среды. К таким средствам относятся
Комплекс взаимосвязанных элементов, участвующих в оценивании состояния объекта (объект, блок контроля и внешняя среда ), называется системой контроля. Последняя может рассматриваться как самостоятельная система и, в то же время, является необходимой составной частью системы управления.
Блок управления - это комплекс факторов, оказывающих управляющее воздействие на объект с учетом задания и информации о текущем состоянии объекта (оценки). Основные функции этого блока сводятся к обработке информации, т.е. носят вычислительный характер. К блокам управления естественных и технических систем можно отнести:
В зависимости от природы управляемых объектов и других элементов системы можно выделить биологические, экологические, экономические и технические системы управления. Это системы стабилизации температуры живых организмов и фокусировки органов зрения; стабилизации концентрации веществ в организмах и газов в атмосфере, системы управления торговыми предприятиями, стабилизации курса ценных бумаг и регулирования спроса и предложения. В качестве примеров технических систем различного уровня сложности можно привести:
Основным предметом теории автоматического управления являются системы автоматического управления, системы автоматического контроля, и, отчасти, автоматизированные системы.
Системы автоматического управления (САУ) и автоматического контроля - это технические и природные системы, выполняющие свои функции автоматически, т.е. без осознанного участия человека.
Автоматизированная система - это система, часть функций которой выполняется автоматически, а часть оператором (организатором).
Математические основы теории автоматического управления (МОТАУ) является учебной дисциплиной входящей в учебные планы:
Цель преподавания дисциплины состоит в том, чтобы дать студентам достаточно полное представление об основных концепциях и принципах получения, преобразования и анализа различных видов математических моделей, используемых в теории автоматического управления для описания объектов управления различной природы и систем управления различных классов. Об этом говорит сайт https://intellect.icu . Кроме того, студенты должны овладеть навыками решения практических задач, связанных с математическим моделированием в теории автоматического управления, рационально используя математический аппарат.
Широкий набор методов анализа и синтеза систем автоматического управления, различных форм представления математических моделей объектов различной природы, используемых специалистами и бакалаврами, требует решения в рамках дисциплины МОТАУ следующих задач:
Изучение дисциплины базируется на том, что студент имеет соответствующую математическую подготовку в области дифференциального и интегрального исчислений, линейной алгебры, комплексных чисел и тригонометрических функций, а также знаком с основными понятиями и законами, рассматриваемыми в курсах теоретических основ электротехники и теоретической механики. Обучение в 4 семестре происходит параллельно с изучением ТОЭ (часть 2), в 5 семестре – с изучением ТАУ (часть 1).
Дисциплина рассчитана на изучение в течение 4 и 5 семестров (2 и 3 курс), включает в свой состав 42 лекционных часа, 28 часов практических занятий и 14 часов лабораторного практикума.
Дисциплина включает в себя следующие основные разделы:
основы математического описания систем автоматического управления,
виды математических моделей динамических звеньев
математические модели элементарных динамических звеньев,
математические модели САУ,
особенности математических моделей многомерных систем автоматического управления,
методы оценки качества систем автоматического управления,
идентификация параметров математической модели систем автоматического управления.
Определение: Управление – это такая организация того или иного технологического процесса, которая обеспечивает достижение поставленной цели.
Теория управления является разделом современной науки и техники. Она базируется (основывается) как на фундаментальных (общенаучных) дисциплинах (например, математика, физика, химия и т.д.), так и на прикладных дисциплинах (электроника, микропроцессорная техника, программирование и т.д.).
Любой процесс управления (автоматического) состоит из следующих основных этапов (элементов):
Для реализации Процесса Управления система управления (СУ) должна иметь:
Определение: Если система управления (СУ) содержит все перечисленные выше части, то она является замкнутой.
Определение: Управление техническим объектом с использованием информации о результатах управления называется принципом обратной связи.
Схематично такая система управления может быть представлена в виде:
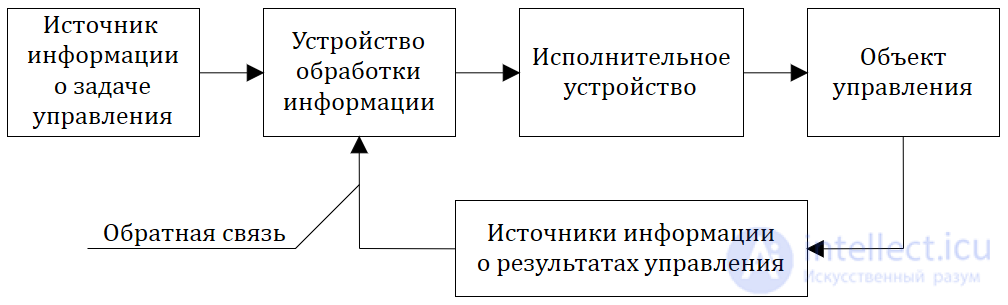
Рис. 1.1.1 — Структура системы управления (СУ)
Если система управления (СУ) имеет структурную схему, вид которой соответствует рис. 1.1.1, и функционирует (работает) без участия человека (оператора), то она называется системой автоматического управления (САУ).
Если СУ функционирует с участием человека (оператора), то она называется автоматизированной СУ.
Если Управление обеспечивает заданный закон изменения объекта во времени независимо от результатов управления, то такое управление совершается по разомкнутому циклу, а само управление называется программным управлением.
К системам, работающим по разомкнутому циклу, относятся промышленные автоматы (конвейерные линии, роторные линии и т.д.), станки с числовым программным управлением (ЧПУ): см. пример на рис. 1.1.2.
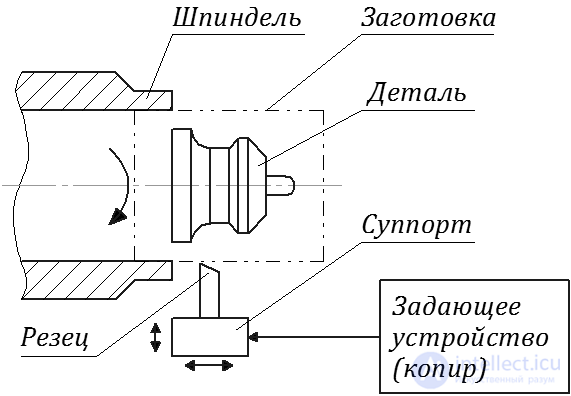
Рис.1.1.2 — Пример программного управления
Задающее устройство может быть, например, и “копиром”.
Поскольку в данном примере нет датчиков (измерителей), контролирующих изготавливаемую деталь, то если, например, резец был установлен неправильно или сломался, то поставленная цель (изготовление детали) не может быть достигнута (реализована). Обычно в системах подобного типа необходим выходной контроль, который будет только фиксировать отклонение размеров и формы детали от желаемой.
Автоматические системы управления подразделяются на 3 типа:
САР и СС являются подмножествами 
Определение: Автоматическая система управления, обеспечивающая постоянство какой-либо физической величины (группы величин) в объекте управления называется системой автоматического регулирования (САР).
Системы автоматического регулирования (САР) — наиболее распространенный тип систем автоматического управления.
Первый в мире автоматический регулятор (18-е столетие) – регулятор Уатта. Данная схема (см. рис. 1.1.3) реализована Уаттом в Англии для поддержания постоянной скорости вращения колеса паровой машины и, соответственно, для поддержания постоянства скорости вращения (движения) шкива (ремня) трансмиссии.
В данной схеме чувствительными элементами (измерительными датчиками) являются “грузы” (сферы). «Грузы» (сферы) также “заставляют” перемещаться коромысло и затем задвижку. Поэтому данную систему можно отнести к системе прямого регулирования, а регулятор — к регулятору прямого действия, так как он одновременно выполняет функции и “измерителя” и “регулятора”.
В регуляторах прямого действия дополнительного источника энергии для перемещения регулирующего органа не требуется.
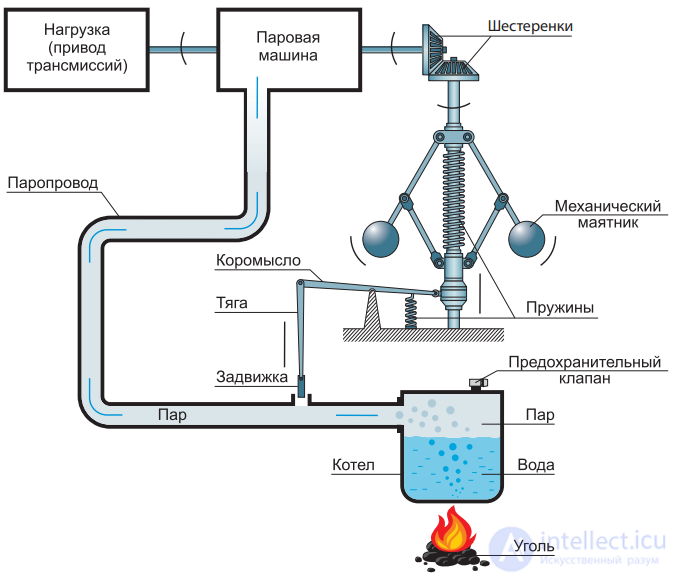
Рис. 1.1.3 — Схема автоматического регулятора Уатта
В системах непрямого регулирования необходимо присутствие (наличие) усилителя (например, мощности), дополнительного исполнительного механизма, содержащего, например, электродвигатель, серводвигатель, гидропривод и т.д.
Примером САУ (системы автоматического управления), в полном смысле этого определения, может служить система управления, обеспечивающая вывод ракеты на орбиту, где управляемой величиной может быть, например, угол между осью ракеты и нормалью к Земле ==> см. рис. 1.1.4.а и рис. 1.1.4.б


Рис. 1.1.4 (а) Рис. 1.1.4 (б)
САУ управляема (полностью управляема), если она может быть переведена из любого начального состояния x0(t) в другое произвольное состояние x1(t) в произвольный момент времени путем приложения кусочно-непрерывного воздействия U(t)∈[t0;t1].
Состояние  линейной системы управляемо, если существует такой вход
линейной системы управляемо, если существует такой вход  , который переводил бы начальное состояние
, который переводил бы начальное состояние  в конечное состояние
в конечное состояние  (начало координат) за конечный интервал времени
(начало координат) за конечный интервал времени  .
.
Система называется полностью управляемой, если все компоненты ее вектора состояний управляемы.
САУ наблюдаема (полностью наблюдаема), если все переменные состояния x(t) можно определить по выходному (измеряемому) воздействию y(t).
Наблюдаемость в теории управления — свойство системы, показывающее, можно ли по выходу полностью восстановить информацию о состояниях системы.
 при известном управляющем воздействии
при известном управляющем воздействии  можно определить все начальные компоненты вектора состояния
можно определить все начальные компоненты вектора состояния  '.
'.Соответственно наблюдаемыми состояниями системы являются те компоненты вектора состояния, которые можно восстановить по условиям, приведенным выше.
Более формально можно сказать, что наблюдаемость позволяет по выходу системы судить о процессах, происходящих внутри нее. Ввиду того, что состояния системы играют важную роль в управлении с помощью обратных связей, важно, чтобы они были наблюдаемыми.
Для линейных систем существует критерий управляемости в пространстве состояний.
Пусть существует система порядка  (с компонентами вектора состояния),
(с компонентами вектора состояния),  входами и
входами и  выходами, записанная в виде:
выходами, записанная в виде:


где
 ;
;  ; ;
; ;
![{\displaystyle \operatorname {dim} [A]=n\times n}](/th/25/blogs/id6509/7d32178d05ddf89f5c55e66440e2be1d.svg) ,
, ![{\displaystyle \operatorname {dim} [B]=n\times p}](/th/25/blogs/id6509/31f9c5d5a8821115bc2dbcbb35ea5a7f.svg) ,
, ![{\displaystyle \operatorname {dim} [C]=q\times n}](/th/25/blogs/id6509/a525fccef935ccdb943891ef941836e0.svg) ,
, ![{\displaystyle \operatorname {dim} [D]=q\times p}](/th/25/blogs/id6509/2d38f79a9504745a3f68bc0e476fb186.svg) ,
,  .
.
здесь  — «вектор состояния»,
— «вектор состояния»,  — «вектор выхода»,
— «вектор выхода»,  — «вектор входа»,
— «вектор входа»,  — «матрица системы»,
— «матрица системы»,  — «матрица управления»,
— «матрица управления»,  — «матрица выхода»,
— «матрица выхода»,  — «сквозная матрица».
— «сквозная матрица».
Для нее можно составить матрицу управляемости:

Согласно критерию управляемости если ранг матрицы управляемости равен , система является полностью управляемой.
Для линейных систем существует критерий наблюдаемости в пространстве состояний.
Пусть существует система порядка (с компонентами вектора состояния), входами и выходами, записанная в виде:


где
; ; ;
![\operatorname{dim}[A(\cdot)] = n \times n](/th/25/blogs/id6509/cdd93154e565274f6d7449b42cb861d2.svg) ,
, ![\operatorname{dim}[B(\cdot)] = n \times p](/th/25/blogs/id6509/1a906d1c372854a3b246a8b6bdc4c700.svg) ,
, ![\operatorname{dim}[C(\cdot)] = q \times n](/th/25/blogs/id6509/1323f5682f858210c42ce02a54c3b18e.svg) ,
, ![\operatorname{dim}[D(\cdot)] = q \times p](/th/25/blogs/id6509/77d84170054c83ccd2d9716bc9688666.svg) , .
, .
здесь — «вектор состояния», — «вектор выхода», — «вектор входа»,  — «матрица системы»,
— «матрица системы»,  — «матрица входа»,
— «матрица входа»,  — «матрица управления»,
— «матрица управления»,  — «сквозная матрица».
— «сквозная матрица».
Для нее можно составить матрицу наблюдаемости:

Согласно критерию наблюдаемости если ранг матрицы наблюдаемости равен , система является наблюдаемой.
Прочтение данной статьи про основы теории автоматического управления позволяет сделать вывод о значимости данной информации для обеспечения качества и оптимальности процессов. Надеюсь, что теперь ты понял что такое основы теории автоматического управления, теория автоматического управления, автоматическое управление, критерий наблюдаемости, критерий управляемости, критерий калмана и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Математические основы теории автоматического управления

Комментарии