Лекция
Привет, Вы узнаете о том , что такое модели управляемых систем, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое модели управляемых систем , настоятельно рекомендую прочитать все из категории Математические основы теории автоматического управления.
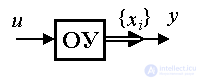
3.2.1. Модели вход-состояние-выход. Сначала рассмотрим частный случай управляемой динамической системы с одним входом u(t) и одним выходом y(t) , описываемой уравнением [M1a] , где a0=1. Введем в рассмотрение переменные состояния (3.1). Дифференцируя (3.3) по времени и подставив [M1a] , находим уравнения состояния:
(3.38) 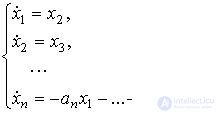
При этом уравнение выхода по-прежнему имеет вид (3.8). Уравнения (3.38) и (3.8) представляют собой простейший случай модели вход-состояние-выход (ВСВ).
В более общем случае модель ВСВ управляемой динамической системы [ М1 ] содержит уравнения состояния вида:
[М4] 
и уравнение выхода [М5]. Для их преобразования к компактной векторно-матричной форме необходимо определить вектор состояния  ,
,  , матрицы
, матрицы  ,
,  , а также матрицу входа размера
, а также матрицу входа размера 

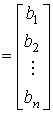 .
.
Тогда уравнения [М4], [М5], описывающие модель вход-состояние-выход, принимают вид:
[М6]  ,
,
[М7]  ,
,
где  .
.
Модель [М6] и [М7] связывает вход  и выход
и выход  через промежуточные переменные
через промежуточные переменные  .
.
В частном случае, когда модель ВСВ представлена в форме ( 3.38), (3.8 ), получаем матрицы
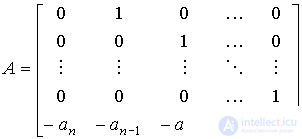 ,
, ,
,  .
.
Аналогично получается модель ВСВ многоканальной (многосвязной) системы (см. модель [M2m]). В общем случае она содержит уравнения состояния вида
[М4m] 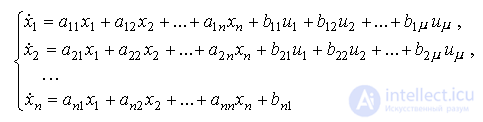
и уравнения выходов [М5m] . Определим  -мерный вектор управления:
-мерный вектор управления: 
 и m -мерный вектор выходов
и m -мерный вектор выходов 
 , а также матрицы
, а также матрицы
 ,
, 
размерности  и
и  , соответственно. Тогда уравнения [M4m] и [M5m] можно переписать в виде [M6] и [M7].
, соответственно. Тогда уравнения [M4m] и [M5m] можно переписать в виде [M6] и [M7].
Рассмотрим возмущенную динамическую систему, (см. [М1f]), т.е. управляемую систему на вход которой дополнительно действует входной сигнал ( возмущающее воздействие )  (t ). Уравнение состояния такой системы записывается в виде:
(t ). Уравнение состояния такой системы записывается в виде:
[М4f] 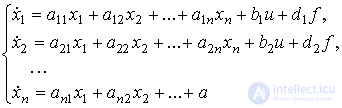 ,
,
где di ,  , - коэффициенты, а уравнение выхода сохраняет форму [M5]. Векторно-матричная форма модели [M4f] имеет вид :
, - коэффициенты, а уравнение выхода сохраняет форму [M5]. Векторно-матричная форма модели [M4f] имеет вид :
[М6f]  ,
,
[M7] y=Cx,
где 
 .
.
Если на вход системы действует несколько возмущающих воздействий fk , то в уравнении [M6f]  - вектор возмущений, и
- вектор возмущений, и  .
.
В частном случае (см. Об этом говорит сайт https://intellect.icu . (3.35) ) уравнения состояния возмущенной системы принимают вид
(3.39) 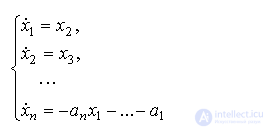
и в уравнении [М6f]
 .
.
Рассмотрим решения уравнений [М6], [М7], полагая  . Решение уравнения состояния [M6] можно представить в виде:
. Решение уравнения состояния [M6] можно представить в виде:
(3.40)  ,
,
где  (t) - свободная составляющая (переходный процесс автономной системы), соответствующая решениям однородного дифференциального уравнения [M6a] и зависящая от начальных условий
(t) - свободная составляющая (переходный процесс автономной системы), соответствующая решениям однородного дифференциального уравнения [M6a] и зависящая от начальных условий  ,
,  (t) - вынужденная составляющая, соответствующая переходному процессу системы [M6] при нулевых начальных условиях
(t) - вынужденная составляющая, соответствующая переходному процессу системы [M6] при нулевых начальных условиях  (реакция системы на входное воздействие u(t)).
(реакция системы на входное воздействие u(t)).
Подставляя (3.40) в уравнение выхода [M7] , получаем
(3.41)  ,
,
где
(3.42)  .
.
Отметим, что матрица
(3.43) 
является весовой (импульсной переходной) матрицей (при  - весовой функцией) и , следовательно , уравнение (3.42) совпадает с приведенным ранее выражением (2.35).
- весовой функцией) и , следовательно , уравнение (3.42) совпадает с приведенным ранее выражением (2.35).
Для возмущенных моделей ВСВ решения могут быть получены в аналогичной форме.
3.2.2. Передаточная функция (матрица) модели ВСВ и структурные схемы. Приведенные выше уравнения, описывающие модели вход-состояние-выход , могут быть записаны в операторной форме (см. 2.1). Рассмотрим уравнения [M6a], [M7]. Используя оператор дифференцирования p=d/dt, запишем  . Тогда из уравнение состояния [M6a] после простейших алгебраических преобразований находим
. Тогда из уравнение состояния [M6a] после простейших алгебраических преобразований находим
(3.44)  .
.
Подставляя последнее выражение в уравнение выхода [M7] получаем
(3.45)  .
.
Введем обозначение
(3.46) 
и запишем предыдущее уравнение в виде
(3.47)  .
.
Сравнение с уравнением [M3m] показывает, что матричный интегро-дифференциальный оператор W(p) есть не что иное, как передаточная матрица управляемой динамической системы (см. п. 2.1.3 ).
Рассмотрим свойства оператора (3.4 6). Матрица  называется резольвентой и может быть представлена в виде
называется резольвентой и может быть представлена в виде
(3.48)  ,
,
где  - числовые матрицы
- числовые матрицы  . Тогда
. Тогда
(3.49)  ,
,
где  ;
;  - матричный оператор.
- матричный оператор.
Для случая одноканальной системы ( m= =1) W(p) - передаточная функция. Принимая во внимание уравнение (3.48), найдем, что
(3.50)  -
-
характеристический полином системы; а
(3.51)  -
-
характеристический полином правой части дифференциального уравнения (см. п. 2.1.1). Следовательно, собственные числа матрицы A в точности совпадают с корнями характеристического уравнения (полюсами) системы
(3.52)  .
.
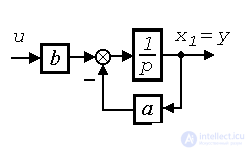
Для построения структурной схемы, соотвествующей модели ВСВ, перепишем уравнение состояния [М6] в операторном виде
(3.53) 
и воспользуемся также уравнением выхода [М7 ]  . Структурная схема системы принимает вид, представленный на рис. 3.2 .
. Структурная схема системы принимает вид, представленный на рис. 3.2 .
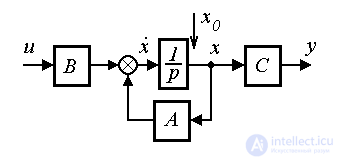
Рис. 3. 2. Структурная схема модели ВСВ
В частном случае, когда уравнения состояния записаны в форме (3.38), (3.8) найдем
(3.54) 
(3.55)  .
.
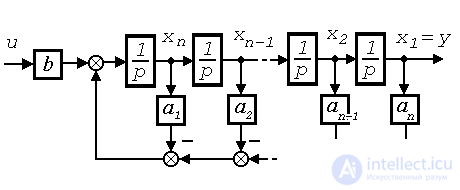
Рис. 3.3. Структурная схема модели ( 3.38), (3.8)
Структурная схема приведена на рис. 3.3 и соотвествует кононической управляемой форме представления линейной системы (см. п. 3.3.2)
3.2.3. Статический режим. Рассмотрим поведение модели ВСВ при постоянном входном (управляющем) воздействии, т.е.  . В этом случае решение дифференциального уравнения [М6а] соответствует установившейся составляющей переходного процесса и ищется в виде
. В этом случае решение дифференциального уравнения [М6а] соответствует установившейся составляющей переходного процесса и ищется в виде  .Замечая, что
.Замечая, что  находим:
находим:
(3.56)  .
.
При условии, что  , ( т.е.
, ( т.е.  ) , алгебраическое уравнение (3.56) единственным образом разрешимо относительно x у :
) , алгебраическое уравнение (3.56) единственным образом разрешимо относительно x у :
(3.57)  .
.
Подставляя найденное решение в уравнение выхода [М7], находим статическую характеристику системы [М6а], [М7]
(3.58)  .
.
Принимая во внимание выражение (2.47), с очевидностью можно записать
(3.59) 
и получить выражение (2.46).
Если система такова, что  , то матрица A необратима и система не имеет статического режима (см. п. 2.2.5).
, то матрица A необратима и система не имеет статического режима (см. п. 2.2.5).
Пример 3.1. Рассмотрим систему второго порядка ( n =2), модель ВВ которой представлена уравнением
(3.60)  .
.
Переменные состояния определяются выражениями
(3.61)  ;
; 
и модель ВСВ находятся как
(3.62) 
 ,
,
(3.63)  .
.
Векторно-матричная форма модели имеет вид
(3.62а) 
 ,
,
(3.63а)  .
.
Пример 3.2.  - цепь, рассмотренная в п. 1.1.2, описывается дифференциальным уравнением первого порядка:
- цепь, рассмотренная в п. 1.1.2, описывается дифференциальным уравнением первого порядка:
(3.64)  .
.
Введем обозначения
(3.65) 
и
(3.66)  .
.
Уравнение (3.64) принимает вид
(3.67)  ,
,
(3.68)  ,
,
где  и
и  .
.
Пример 3.3. Рассмотрим дифференциальное уравнение второго порядка
 ,
,
описывающее движение материальной точки (см. пример 2.3).
Уравнение приводится к виду
(3.69)  ,
,
где  . Введем в рассмотрение переменные состояния
. Введем в рассмотрение переменные состояния
(3.70)  ,
,
(3.71) 
и найдем модель ВСВ как
(3.72)  ,
,
(3.73) .
Векторно-матричная форма модели имеет вид
 ,
,
.
Это частный случай ранее рассмотренной модели (3.62а ), ( 3.63а ).
Прочтение данной статьи про модели управляемых систем позволяет сделать вывод о значимости данной информации для обеспечения качества и оптимальности процессов. Надеюсь, что теперь ты понял что такое модели управляемых систем и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Математические основы теории автоматического управления
Из статьи мы узнали кратко, но содержательно про модели управляемых систем
Комментарии