Лекция
Привет, Вы узнаете о том , что такое ориентированные графы систем автоматического управления, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое ориентированные графы систем автоматического управления , настоятельно рекомендую прочитать все из категории Математические основы теории автоматического управления.
Математическую модель САУ можно наглядно представить с помощью ориентированных графов (орграфов).
Орграфы используются в сложных САУ, особенно при управлении и автоматизации технологических процессов в промышленности, когда описание в виде структурных схем становится громоздким и сложным для восприятия. Рассмотрим простейший орграф динамического звена САУ.

Рис. 1
Орграфом САУ является графическое представление САУ в виде совокупности вершин, соответствующих переменным, и дуг, соединяющих вершины.
Рассмотрим основные свойства орграфа:
Каждая дуга со стрелкой, указывающей направление распространения сигнала, изображает звено и характеризуется оператором изображаемого звена (передаточной функцией);
Каждой вершине, отмеченной кружком, ставится в соответствие одна из переменных САУ (изображение переменной по Лапласу);
Входная величина дуги равна переменной вершины, из которой эта дуга исходит;
Выходная величина дуги получается как результат преобразования оператором входной величины;
Если к вершине подходят несколько дуг, то соответствующая вершине переменная равна сумме выходных величин этих дуг (аналог суммирующего звена структурных схем);
Если из вершины исходит несколько дуг, то входные величины всех этих дуг одинаковы (аналог точки ветвления в структурных схемах).
Ориентированный граф (орграф) можно построить по структурной схеме и наоборот. При построении орграфа по структурной схеме необходимо придерживаться следующих правил:
Модифицируют структурную схему так, чтобы в сумматорах все переменные складывались с положительным знаком, отрицательные знаки вносятся в передаточные функции соответствующих звеньев;
Каждый сумматор структурной схемы заменяется вершиной, которой ставится в соответствие выходная переменная сумматора;
Каждое динамическое звено заменяется дугой с оператором, равным передаточной функции звена;
Каждой переменной, включая и входные воздействия, соответствует своя вершина.
Рассмотрим пример. На рис. 2 показана структурная исходная схема, на рис. 3 показан полученный орграф САУ.

Рис. 2
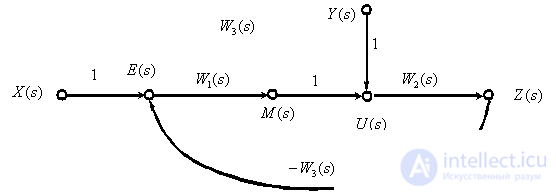
Рис. 3
Преобразовать орграф САУ можно, как и структурную схему, используя правила эквивалентных преобразований для орграфов, которые легко могут быть получены по аналогичным правилам для структурных схем.
Последовательное соединение динамических звеньев.

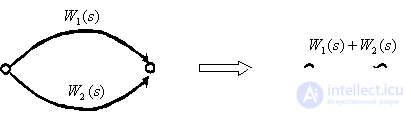
Параллельное соединение динамических звеньев.
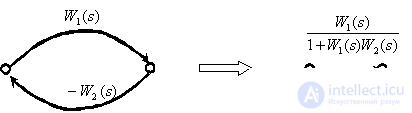
Замкнутый контур с отрицательной обратной связью.
Замкнутый контур с положительной обратной связью.

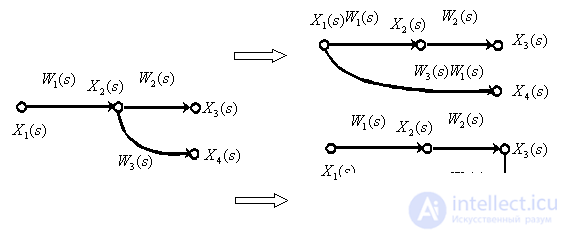
Перенос точки ветвления через динамическое звено.
Перенос суммирующего звена через динамическое звено.

Использование формулы Мейсона для преобразования структурных схем и ориентированных графов
Когда структурная схема преобразована в орграф, для нахождения необходимой передаточной функции можно использовать формулу Мейсона (правило некасающихся контуров), которая позволяет получить передаточную функцию, связывающую переменные в сложных, многоконтурных САУ.
Рассмотрим общий вид формулы и поясним ее компоненты:
|
|
(1) |
где  - передаточная функция
- передаточная функция  -го отдельного прямого пути от
-го отдельного прямого пути от  до
до  , вычисленная как произведение передаточных функций дуг, входящих в этот путь;
, вычисленная как произведение передаточных функций дуг, входящих в этот путь;
 - определитель орграфа.
- определитель орграфа.
|
|
(2) |
где  - передаточная функция
- передаточная функция  -го замкнутого контура, вычисленная как произведение передаточных функций дуг, входящих в этот контур;
-го замкнутого контура, вычисленная как произведение передаточных функций дуг, входящих в этот контур;
 - произведение передаточных функций пары (
- произведение передаточных функций пары ( -го и
-го и  -го) замкнутых контуров, не касающихся ни дугами, ни вершинами, суммирование осуществляется по всем парам некасающихся контуров;
-го) замкнутых контуров, не касающихся ни дугами, ни вершинами, суммирование осуществляется по всем парам некасающихся контуров;
 - произведение тройки (
- произведение тройки ( -го,
-го,  -го и
-го и  -го) некасающихся контуров, суммирование производится по всем тройкам не касающихся контуров.
-го) некасающихся контуров, суммирование производится по всем тройкам не касающихся контуров.
 - определитель орграфа, полученного при удалении дуг и вершин
- определитель орграфа, полученного при удалении дуг и вершин  -го отдельного прямого пути, определяется по формуле (2).
-го отдельного прямого пути, определяется по формуле (2).
Поясним использование формулы Мейсона.
В начале выявляются все отдельные прямые пути между входной и выходной переменными, для которых необходимо определить передаточную функцию. Об этом говорит сайт https://intellect.icu . Отдельным прямым путем считается такая последовательность дуг и вершин, которая соединяет вершины, соответствующие входному и выходному сигналам. При этом отдельный прямой путь не должен пересекать в вершинах сам себя.
Далее выявляются все замкнутые контуры в орграфе САУ. Замкнутым считается такой контур, когда между двумя вершинами имеется как прямая, так и обратная связь. Передаточная функция замкнутого контура определяется как произведение передаточных функций всех дуг, входящих в контур с учетом знаков.
После того как выявлены все замкнутые контуры орграфа, необходимо проанализировать – есть ли контуры, которые не касаются ни дугами, ни вершинами, есть ли пары, тройки и т. д. таких контуров.
На основании полученного формируется определитель орграфа по формуле (2).
Определители орграфов, полученных после изъятия  -х отдельных прямых путей, также формируются по формуле (2), при этом учитываются только те контуры, которые остаются после изъятия
-х отдельных прямых путей, также формируются по формуле (2), при этом учитываются только те контуры, которые остаются после изъятия  -го прямого пути. Если после изъятия прямого пути не остается ни одного замкнутого контура, определитель такого орграфа принимается равным единице.
-го прямого пути. Если после изъятия прямого пути не остается ни одного замкнутого контура, определитель такого орграфа принимается равным единице.
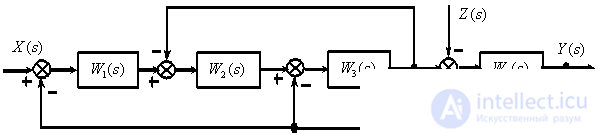
В качестве примера определим передаточную функцию между  и
и  в структурной схеме САУ, показанной на рис. 4, полагая в соответствии с принципом суперпозиции
в структурной схеме САУ, показанной на рис. 4, полагая в соответствии с принципом суперпозиции  .
.

Рис. 4
Преобразуем структурную схему в ориентированный граф (рис. 5).
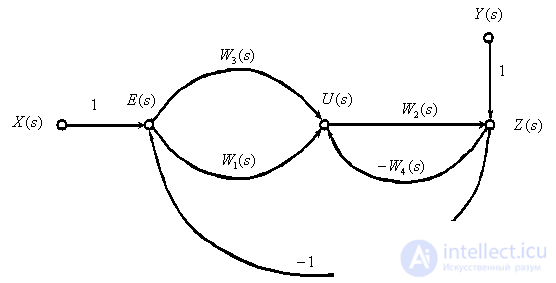
Рис. 5
Определим прямые пути:


Определим замкнутые контуры:



Все контуры имеют общую дугу  , поэтому некасающихся контуров нет. Определитель орграфа имеет вид
, поэтому некасающихся контуров нет. Определитель орграфа имеет вид

При изъятии 1-го или 2-го прямых путей в орграфе не сохраняется ни одного замкнутого контура, поэтому

Передаточная функция имеет вид

Контрольные вопросы и задачи
Дайте определение орграфа динамического звена.
Поясните процедуру преобразования структурной схемы САУ в ориентированный граф.
Что называется отдельным прямым путем при использовании правила некасающихся контуров?
Какие замкнутые контуры называют некасающимися?
Определите передаточную функцию

по следующей структурной схеме
Ответ:
 .
.
Определите передаточную функцию

по следующей структурной схеме

Ответ:
 .
.
Определите передаточную функцию

по следующей структурной схеме
Ответ:
 .
.
Определите передаточную функцию

по следующей структурной схеме
Ответ:

Прочтение данной статьи про ориентированные графы систем автоматического управления позволяет сделать вывод о значимости данной информации для обеспечения качества и оптимальности процессов. Надеюсь, что теперь ты понял что такое ориентированные графы систем автоматического управления и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Математические основы теории автоматического управления
Из статьи мы узнали кратко, но содержательно про ориентированные графы систем автоматического управленияОтветы на вопросы для самопроверки пишите в комментариях, мы проверим, или же задавайте свой вопрос по данной теме.



Комментарии