Лекция
Привет, Вы узнаете о том , что такое фазовые траектории автономной системы второго порядка, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое фазовые траектории автономной системы второго порядка , настоятельно рекомендую прочитать все из категории Математические основы теории автоматического управления.
Рассмотрим автономную систему второго порядка:
(3.74)  ,
,
с начальными значениями  ,
,  . Характеристическое уравнение системы
. Характеристическое уравнение системы
(3.75) 
имеет два вещественных или комплесно-сопряженных корня (полюса системы):
(3.76)  ,
,
расположение которых на комплексной плоскости определяет вид переходных процессов
(3.77) y=y(y0,  , t)
, t)

и динамические свойства системы (см. п. 1.4.1).
Определим переменные состояния, как фазовые переменные:  ,
,  . Модель состояние-выход принимает вид:
. Модель состояние-выход принимает вид:
(3.78)  ,
,
(3.79)  ,
,
(3.80)  ,
,
с начальными значениями  ,
,  Собственные числа матрицы системы
Собственные числа матрицы системы

совпадают с корнями характеристического полинома (3.75) p1,2.
Собственные векторы  1,2 (см. п. 3.1.3) рассматриваемой системы второго порядка находятся (при условии вещественности ее полюсов) из выражения
1,2 (см. п. 3.1.3) рассматриваемой системы второго порядка находятся (при условии вещественности ее полюсов) из выражения
 ,
,
т.е.

и соответствующие собственные подпространства R1,2 представлены прямыми
(3.81) x2 =p1,2 x1.
Равновесные (установившиеся) состояния ( x1*, x2* ) системы (3.78), (3.79), (3.80) находятся из условия
(3.82)  ,
,  .
.
При a 2  0 получаем, что положением равновесия является начало координат
0 получаем, что положением равновесия является начало координат
(3.83) x1*=0, x2*=0,
а при a2 = 0 находим множество равновесных состояний (прямую)
(3.84) x2 =0.
Напомним, что интегральной кривой (фазовой траекторией) рассматриваемой системы является годограф вектора состояния  =
= при изменении параметра t, а множество фазовых траекторий, полученных для различных начальных условий, образуют ее фазовый портрет (см. п. 3.1.2).Фазовые траектории могут быть получены экспериментально или найдены аналитическим путем. В последнем случае используется следующий прием. Уравнения (3.78), (3.79) записываются в виде
при изменении параметра t, а множество фазовых траекторий, полученных для различных начальных условий, образуют ее фазовый портрет (см. п. 3.1.2).Фазовые траектории могут быть получены экспериментально или найдены аналитическим путем. В последнем случае используется следующий прием. Уравнения (3.78), (3.79) записываются в виде
dx1=x2 dt,
dx2= - (a2 x1 +a1 x2) dt.
После деление второго выражения на первое получаем дифференциальное уравнение
(3.85) 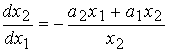 .
.
Решение этого уравнения ищется в виде
(3.86) x2= 1 (x1)
1 (x1)
и определяет интегральную (фазовую) траекторию рассматриваемой
системы на плоскости R2.
Рассмотрим переходные процессы, соответствующие различным значениям корней характеристического уравнения (полюсов системы (3.78) - (3.80)).
1. Об этом говорит сайт https://intellect.icu . Для неравных вещественных корней (рис. 3.4, 3.5)
(3.87) p1,2= 1,2=
1,2=
уравнение (3.74) имеет решение
(3.88)  ,
,
что соответствует апериодическому процессу (см. п. 2.2.2).
При условии, что a1 >0 и a2>0,
Re p1,2= 1,2<0,
(рис. 3.4). В этом случае имеет место затухающий переходный процесс, выполняется условие
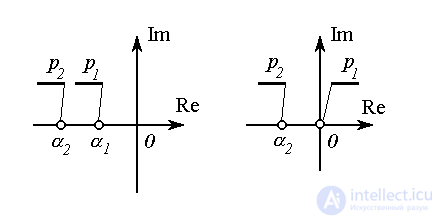
Рис. 3.4
Рис. 3.5
(3.89) 
и фазовые траектории системы при t 
 сходятся к положению равновесия O (рис. 3.6), которое называется устойчивым узлом. (Система такого рода относится к классу асимпототически устойчивых систем [11,12] ). Система имеет два собственных (инвариантных) подпространства R1 и R2, на которых решения уравнения (3.74) записываются как
сходятся к положению равновесия O (рис. 3.6), которое называется устойчивым узлом. (Система такого рода относится к классу асимпототически устойчивых систем [11,12] ). Система имеет два собственных (инвариантных) подпространства R1 и R2, на которых решения уравнения (3.74) записываются как

Рис. 3.6
Рис. 3.7
(3.90) 
и
(3.91)  ,
,
т.е. динамика на собственных подпространствах соответствует поведению системы первого порядка.
При условии, что a1 >0 и a2 =0, получаем
Re p1= <0, p2=0,
(рис. 3.5 ). Фазовые траектории системы (рис. 3. 7 ) при t сходятся к множеству равновесных состояний (прямой R0 ), описываемому уравнением (3.84). Это же множество является собственным подпространством системы. (Система такого рода относится к классу устойчивых, или нейтрально устойчивых, систем, см. [10,12])
При условии, что a1 <0 и a2>0,
Re p1= 1>0, Re p2= 2<0,
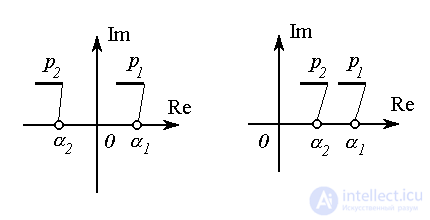
Рис. 3.8 Рис. 3.9
(рис. 3.8). В этом случае имеет место расходящийся переходный процесс. Фазовые траектории системы при t расходятся (рис. 3.10):
(3.92) 
за исключением траекторий, начинающихся на прямой R2 , для которых выполняется предельное соотношение (3.89).(Система такого рода относится к классу неустойчивых систем, см. [10,12] ) Положение равновесия системы (точка O ) называется седловой точкой (седлом). Система имеет два собственных (инвариантных) подпространства R1 и R2 , на которых решения (3.74) записываются в виде (3.90) или (3.91) .
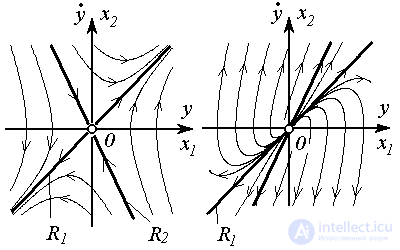
Рис. 3.10 Рис. 3.11
При условии, что a1 <0 и a2<0,
Re p1= 1>0, Re p2= 2>0,
(рис. 3.9). В этом случае имеет место расходящийся переходный процесс и все фазовые траектории (рис. 3.11) системы при t расходятся (выполняется (3.92)). Положение равновесия системы (точка O ) называется неустойчивым узлом (и система также неустойчива). Система также имеет два собственных (инвариантных) подпространства R1 и R2.
2. Если  , то система имеет равные вещественные полюсы (рис. 3.12 - 3.14)
, то система имеет равные вещественные полюсы (рис. 3.12 - 3.14)
p1,2= =
и решение уравнения (3.74) принимает вид:
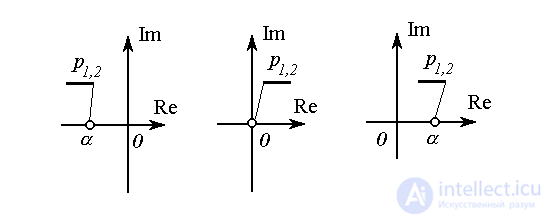
Рис. 3.12 Рис. 3.13 Рис. 3.14
y=(C1+C2t) ,
,
соответствующее апериодическому процессу (см. п. 2.2.2 ).
При условии, что a2 >0 (и a1>0),
Re p1,2= <0,

Рис. 3.15 Рис. 3.16 Рис. 3.17
(рис. 3.12). В этом случае имеет место затухающий переходный процесс, выполняется предельное соотношение (3.89), фазовые траектории при t сходятся к положению равновесия (устойчивому узлу) O (рис. 3.15) и система асимптотически устойчива. Собственные подпространства системы R1 и R2совпадают.
При условии, что a1=a2 =0, получаем
p1= p2=0,
(рис. 3.13) и расходящийся переходный процесс. Фазовые траектории системы (рис. 3.16) при t уходят в бесконечность, за исключением траекторий, начинающихся на множестве равновесных состояний (прямой R0 ), описываемом уравнением x2 = const , и система неустойчива.
При условии, что a2 <0 и a1 <0, выполняется
Re p1,2= >0,
рис. 3.12),. собственные подпространства системы совпадают. В этом случае имеет место предельное соотношение (3.89), фазовые траектории при t расходятся. Положение равновесия O является неустойчивым узлом O (рис. 3.17 ) и система неустойчива.
3 . Если выполняется  , то система имеет комплексно-сопряженные полюсы (рис. 3.18-3.20 )
, то система имеет комплексно-сопряженные полюсы (рис. 3.18-3.20 )


Рис. 3.18 Рис. 3.19 Рис. 3.20
а решения уравнения (3.74) принимают вид

что соответствует колебательному процессу (см. п. 2.2.2).
Рассматриваемая здесь система с комплексными полюсами не имеет собственных подпространств.
При условии, что a1 >0 и a2>0,
Re p1,2= <0,
(рис. 3.18 ). В этом случае имеет место затухающий колебательный переходный процесс. Выполняется ( 3.89 ), фазовые траектории системы при t сходятся к положению равновесия O (рис. 3.21 ), которое называется устойчивым фокусом, и система асимптотически устойчива.
При условии, что a2=0, Re p1,2=0, система имеет чисто мнимые корни
p1,2 = - j
(рис. 3.22 ) и называется линейным осциллятором (см. п. 2.3). В этом случае имеет место незатухающий колебательный процесс. Фазовые траектории системы представлены замкнутыми концентрическими кривыми ( эллиптическими орбитами ) , и система (нейтрально) устойчива. Положение равновесия системы (точка O ) называется центром
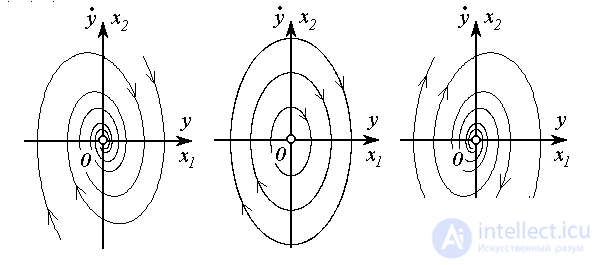
Рис. 3.21 Рис. 3.22 Рис. 3.23
При условии, что a1 < 0 и a2 < 0,
Re p1,2= >0,
(рис. 3.20). В этом случае имеет место расходящийся колебательный переходный процесс. Фазовые траектории системы при t расходятся от положения равновесия O (рис. 3.23), которое называется неустойчивым фокусом, и система неустойчива.
Прочтение данной статьи про фазовые траектории автономной системы второго порядка позволяет сделать вывод о значимости данной информации для обеспечения качества и оптимальности процессов. Надеюсь, что теперь ты понял что такое фазовые траектории автономной системы второго порядка и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Математические основы теории автоматического управления

Комментарии