Лекция
Привет, Вы узнаете о том , что такое модели задающих блоков, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое модели задающих блоков, внешних воздействий , настоятельно рекомендую прочитать все из категории Математические основы теории автоматического управления.
Для описания внешней среды, объектов слежения и генерации задающих воздействий в системах программного управления возникает необходимость в конструировании дополнительных динамических моделей (генераторов
внешних воздействий ), выходом которых является возмущающее  или задающее y*(t) воздействие (см. п. 1.2.1). Для гладких функций и y*(t ) соответствующие генераторы возмущающих и задающих воздействий (задающие блоки) могут быть получены в классе автономных линейных моделей, аналогичных рассмотренным ранее моделям [М1а], [М2а] или [ М6а], [М7]
или задающее y*(t) воздействие (см. п. 1.2.1). Для гладких функций и y*(t ) соответствующие генераторы возмущающих и задающих воздействий (задающие блоки) могут быть получены в классе автономных линейных моделей, аналогичных рассмотренным ранее моделям [М1а], [М2а] или [ М6а], [М7]
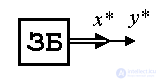
Так, задающий блок ЗБ (генератор задающих воздействий) может быть описан однородным дифференциальным уравнением вида
(4.24) 
с постоянными коэффициентами  i и начальными значениями
i и начальными значениями
(4.25)  ,
,  ,
,
или соответствующими векторно-матричными уравнениями состояния
(4.26) 
и выхода
(4.27)  ,
,
где  - s - мерный вектор заданий (состояния генератора) с начальными значениями координат
- s - мерный вектор заданий (состояния генератора) с начальными значениями координат  .
.
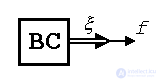
Генератор гладких возмущающих воздействий (модель внешней среды ВС) описывается однородным уравнением
(4.28) 
с постоянными коэффициентами  i и начальными значениями
i и начальными значениями
(4.29)  ,
, 
или в компактной форме
(4.30) 
(4.31) 
где  - r - мерный вектор состояния внешней среды с начальными значениями координат
- r - мерный вектор состояния внешней среды с начальными значениями координат  .
.
Воздействия, генерируемые рассмотренными моделями, соответствуют решениям дифференциальных уравнений (4.26), (4.27) и (4.30), (4.31), т.е. функциям
(4.32) 
и
(4.33)  ,
,
соответственно. В частных случая с помощью таких моделей могут быть получены:
(4.34)  ,
,
где  - постоянные, определяемые как
- постоянные, определяемые как
(4.35)  ;
;
(4.36)  ,
,
где А i ,  i и
i и  i - постоянные, соответствующие амплитудам, фазам и частотам гармоник и т.д.
i - постоянные, соответствующие амплитудам, фазам и частотам гармоник и т.д.
Для построения модели воздействия по заданной функции y*(t ) (или ) можно воспользоваться методом последовательного дифференцирования соответствующих аналитических выражений
(4.37) y=y*(t)
(или f=f(t) ), представленных, например, в виде (4.34) или (4.36).
Пример 4.1. Об этом говорит сайт https://intellect.icu . Для получения модели постоянного сигнала
(4.38) y*(t)=С 0,
продифференцируем последнее выражение по времени. Получим уравнение первого порядка
(4.39) 
с начальным значением y*(0)=С 0 .
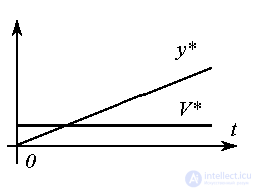
Модель линейно нарастающего сигнала (равномерного движения)
(4.40)  ,
,
получается двукратным дифференцированием. На первом шаге получаем
(4.41)  ,
,
а на втором - искомое дифференциальное уравнение
(4.42)  .
.
Для получения начальных условий из уравнения (4.40) найдем y*(0) =С 0 , а из уравнения (4.41) -  *(0)=С 1.
*(0)=С 1.
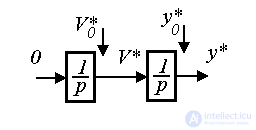
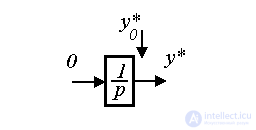
Уравнение (4.42) приводится к форме модели состояния (системе уравнений в форме Коши). Для этого кроме основной переменной состояния, совпадающей с выходной переменной y*(t ), вводится вторая переменная V*(t ) (скорость движения):
(4.43) 
с начальным значением  . Уравнение (4.42) можно переписать в виде
. Уравнение (4.42) можно переписать в виде
(4.44)  .
.
Полученные уравнения (4.43) и (4.44) описывают искомую модель состояния задающего блока.
Отметим, что решение уравнения (4.42) или системы (4.43), (4.44) (т.е. выражение (4.40)) можно записать в виде
(4.45)  .
.
Модель квадратично нарастающего сигнала
(4.46) 
(равноускоренного движения) получается в результате процедуры трехкратного дифференцирования выражения (4.46) и имеет вид
(4.47) 
с начальными условиями
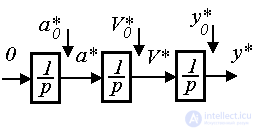
y*(0) =С 0 , *(0) =С 1 и  . Для построения модели состояния рассматриваемого задающего блока вводится переменные состояния y*(t), V*(t), a* (t), где
. Для построения модели состояния рассматриваемого задающего блока вводится переменные состояния y*(t), V*(t), a* (t), где  - ускорение, и после их дифференцирования по времени и соответствующих подстановок получается система уравнений
- ускорение, и после их дифференцирования по времени и соответствующих подстановок получается система уравнений
(4.48) ,
(4.49)  ,
,
(4.50) 
с начальными значениями у* (0) =С 0, V*(0)=C1, a*(0)=C2.
Отметим, что решение уравнения (4.47) или системы (4.48), (4.49) (т.е. выражение (4.46)) можно записать в виде
(5.51) 
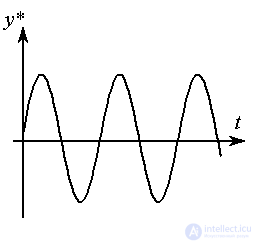
Пример 4.2. Для генерации простейшего гармонического воздействия
с частотой , т.е. сигнала
 ,
,
используется модель одночастотного линейного осциллятора (консервативного звена, см. п. 2.3):
(4.52)  .
.
Значения амплитуды колебаний A и фазового сдвига определяются начальными значениями модели y (0) и  .
.
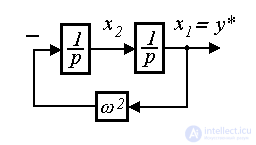
Модель (4.52) легко приводится к форме Коши
(4.53) 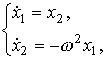
с выходом
(4.54)  .
.
Здесь введены следующие обозначения:
(4.55) 
В частном случае для построения генератора сигнала
(4.56) 
вводятся переменные состояния
(4.57) 
(4.58) 
с начальными значениями
(4.59)  ,
,  .
.
После дифференцирования по времени выражений (4.57), (4.58) и соответствующих подстановок получаем систему уравнений (4.53).
Замечание 4.1. Если переменные состояния выбрать как
(4.60)  ,
,
(4.61) 
с начальными значениями , , то модель состояния задающего генератора примет вид
, то модель состояния задающего генератора примет вид
(4.62) 
Для генерации негладких функций y*(t) и f(t) используются
(4.63) 
где  - негладкое (может быть разрывное) входное воздействие модели.
- негладкое (может быть разрывное) входное воздействие модели.
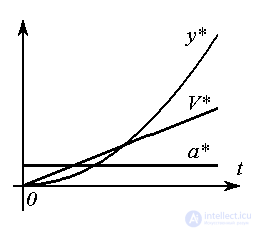
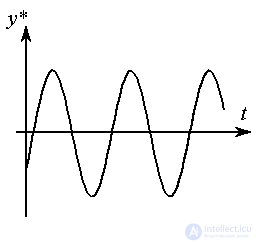
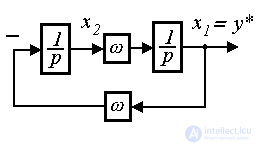
Пример 4.3. Для генерации сигнала y*(t) с трапециидальным графиком скорости  (рис. 4.6) можно воспользоваться моделью:
(рис. 4.6) можно воспользоваться моделью:
(4.64) 
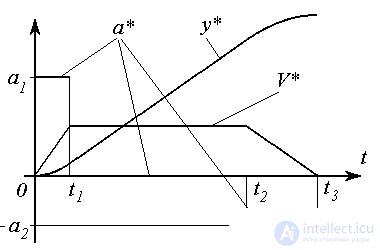
Рис. 4.6. Процессы генератора негладких сигналов
или - в форме Коши
(4.65)  ,
,
(4.66)  ,
,
где a*=a*(t ) - сигнал ускорения вида
(4.67) 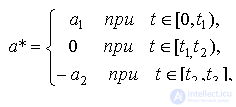
где a1>0 и a2>0 - постоянные.
Прочтение данной статьи про модели задающих блоков позволяет сделать вывод о значимости данной информации для обеспечения качества и оптимальности процессов. Надеюсь, что теперь ты понял что такое модели задающих блоков, внешних воздействий и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Математические основы теории автоматического управления
Из статьи мы узнали кратко, но содержательно про модели задающих блоков
Комментарии