Лекция
Привет, Вы узнаете о том , что такое элементарные звенья, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое элементарные звенья , настоятельно рекомендую прочитать все из категории Математические основы теории автоматического управления.
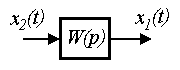
Элементарными звеньями называются простейшие составные части (блоки) системы, поведение которых описывается алгебраическими уравнениями или дифференциальными уравнениями 1-го - 2-го порядка:
(2.50)  ,
,
где  - выходная переменная,
- выходная переменная,  - входная переменная,
- входная переменная,  - постоянные коэффициенты (параметры). Уравнение (2.50) можно записать в операторной форме:
- постоянные коэффициенты (параметры). Уравнение (2.50) можно записать в операторной форме:
 ,
,
т.е. передаточная функция звена имеет вид
(2.51) 
 .
.

Пропорциональное (безинерционное) звено. Звено описывается алгебраическим уравнением
(2.52)  ,
,
где  - коэффициент пропорциональности, который (в силу отсутствия у блока инерционных свойств) совпадает со статической характеристикой. Переходная функция пропорционального звена -
- коэффициент пропорциональности, который (в силу отсутствия у блока инерционных свойств) совпадает со статической характеристикой. Переходная функция пропорционального звена -
(2.53)  .
.
Примеры: измерительные потенциометры, редукторы, усилители напряжения ( ) и т.д.
) и т.д.
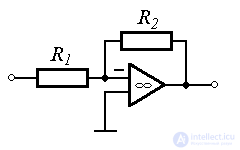
Апериодическое звено. Звено описывается дифференциальным уравнением
(2.54) 
или, в приведенной форме - уравнением

(2.55)  ,
,
где - коэффициент,  - постоянная времени, a=K/T, b=1/K. Операторная форма звена имеет вид
- постоянная времени, a=K/T, b=1/K. Операторная форма звена имеет вид
(2.56) 
или, соответственно,
(2.57)  ,
,
Переходная функция звена определяется выражением
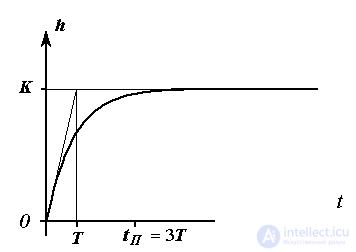
Рис. 2.10. Переходная функция апериодического звена
(2.58) 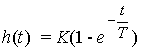 ,
,
а статическая характеристика -
(2.59)  .
.
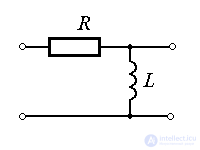
Примеры: усилители мощности, тепловые процессы, процесс разгона двигателя  - цепь (см. пример 1.1), LR цепь.
- цепь (см. пример 1.1), LR цепь.
Интегрирующее звено. Звено описывается дифференциальным уравнением
(2.60) 
или, в операторной форме
(2.61)  .
.
Переходная функция интегрирующего звена
(2.62)  .
.
Звено относится к астатическим блокам и поэтому не имеет статической характеристики.
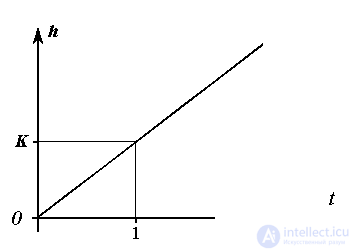
Рис. Об этом говорит сайт https://intellect.icu . 2.11. Переходная функция интегрирующего звена
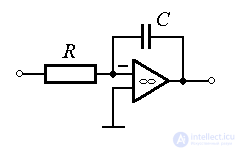
Примеры: элементы механических систем (см. движение материальной точки, пример 2.3), описываемые уравнениями динамики вида
 ,
,
и кинематическими уравнениями
 ;
;
электронные интеграторы (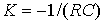 ) и т.д.
) и т.д.
Дифференцирующее звено (идеальное). Звено описывается дифференциальным уравнением

(2.63) 
или, в операторной форме,
(2.64)  .
.
Переходная функция дифференцирующего звена -
(2.65)  ,
,
а реакция звена на линейно-нарастающий сигнал x2=t -
(2.66)  .
.
При x2 = const для любых t>0 выполняется  и, следовательно, статической характеристикой звена является прямая
и, следовательно, статической характеристикой звена является прямая  .
.
Рис. 2.12. Реакция дифференцирующего звена  на линейно нарастающее воздействие
на линейно нарастающее воздействие 

Примеры: тахогенератор (электромашинный датчик скорости), электронный дифференциатор ( ).
).
Замечание 2.4. Выходом дифференцирующего звена является производная входного сигнала, т.е. его мгновенная скорость dx2/dt. Операция нахождения текущего значения скорости x1(t)=dx2(t)/dt только по информации об известном в данный момент времени t сигнале x2(t) физически не реализуема и поэтому идеальных дифференцирующих звеньев не существует. Тем не менее производная может быть приближенно рассчитана как  1(t)=D x2(t)/D t, где D t - интервал времени, D x2 - соответствующее приращение сигнала x2. При уменьшении интервала D t можно получить значение 1(t), сколь угодно близкое к текущему значению скорости x1(t). Следовательно, несмотря на нереализуемость (с абсолютной точностью) операции дифференцирования, теоретически возможно построение звена, которое обеспечивает нахождение производной dx2(t)/dt со сколь угодно высокой точностью.
1(t)=D x2(t)/D t, где D t - интервал времени, D x2 - соответствующее приращение сигнала x2. При уменьшении интервала D t можно получить значение 1(t), сколь угодно близкое к текущему значению скорости x1(t). Следовательно, несмотря на нереализуемость (с абсолютной точностью) операции дифференцирования, теоретически возможно построение звена, которое обеспечивает нахождение производной dx2(t)/dt со сколь угодно высокой точностью.
Реальное дифференцирующее звено. Звено описывается уравнением
(2.67)  .
.
или, в операторной форме,

(2.68) 
Переходная функция звена имеет вид
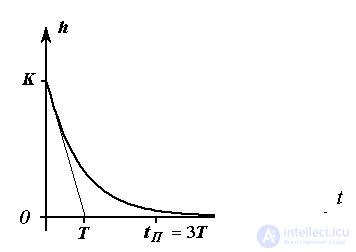
Рис. 2.13. Переходная функция реального дифференцирующего звена
(2.69) 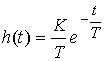 ,
,
а реакция звена на линейно-нарастающий сигнал x1=t совпадает с переходной функцией апериодического звена, т.е.
(2.70)  .
.
При x2=const и  выполняется , что соответствует статической характеристике звена.
выполняется , что соответствует статической характеристике звена.
При достаточно малых постоянных времени T, характеристики звена приближаются к характеристикам идеального дифференцирующего звена (см. Замечание 2.4).
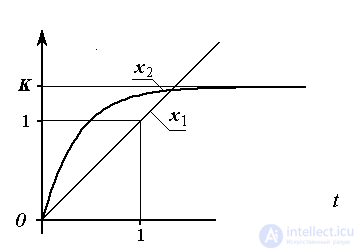
Рис. 2.14. Реакция реального дифференцирующего звена  на линейно нарастающее воздействие
на линейно нарастающее воздействие 
Примеры: CR и RL цепи.

Колебательное звено. Звено описывается дифференциальным уравнением 2-го порядка
(2.71)  ,
,
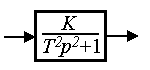
- постоянная времени,  - параметр затухания, или операторным уравнением (2.50), где передаточная функция имеет вид
- параметр затухания, или операторным уравнением (2.50), где передаточная функция имеет вид
(2.72) 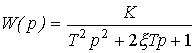 .
.
Корни характеристического уравнения принимают значения
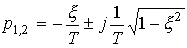
 ,
,
где  - коэффициент затухания,
- коэффициент затухания,  - угловая частота колебаний.
- угловая частота колебаний.
Переходная функция звена имеет вид
(2.73)  ,
,
где  ;
;  , а статическая характеристика -
, а статическая характеристика -
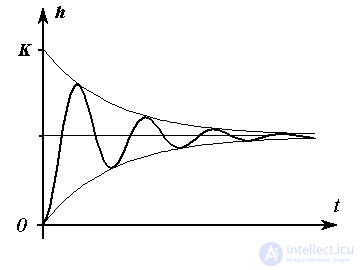
Рис. 2.15. Переходная функция колебательного звена
(2.74)  .
.

Примеры: маятник в вязкой среде,  - цепь.
- цепь.
Замечание 2.5. В предельном случае при  на выходе звена возникают незатухающие колебания, а при
на выходе звена возникают незатухающие колебания, а при  - монотонный (апериодический) процесс, что соответствует рассматриваемым далее консервативному и двойному апериодическому звену.
- монотонный (апериодический) процесс, что соответствует рассматриваемым далее консервативному и двойному апериодическому звену.
Консервативное звено (осциллятор). Звено описывается дифференциальным уравнением
(2.75) 
или операторным уравнением (2.50), где
(2.76)  ,
,
и получается из колебательного звена при . Консервативное звено имеет чисто мнимые полюсы

и переходную функцию вида
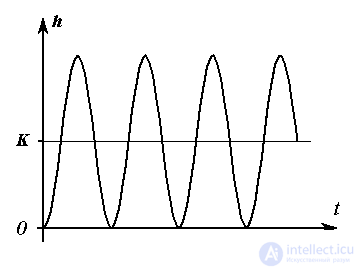
Рис. 2.16. Переходная функция колебательного звена
(2.77)  ,
,
где  . Звено не имеет статической характеристики.
. Звено не имеет статической характеристики.
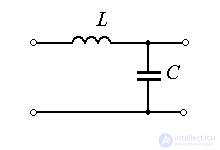
Примеры: маятник в вакууме; идеальный колебательный (LC) контур.
Двойное апериодическое звено. Звено описывается уравнением
(2.78) 

или операторным уравнением (2.50), где
(2.79)  .
.
Звено имеет равные вещественные корни характеристического уравнения
 ,
,
и переходную функцию
(2.80) 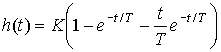 .
.

Рис. 2.17. Переходная функция двойного апериодического звена
Статическая характеристика звена
(2.81)  .
.
Прочтение данной статьи про элементарные звенья позволяет сделать вывод о значимости данной информации для обеспечения качества и оптимальности процессов. Надеюсь, что теперь ты понял что такое элементарные звенья и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Математические основы теории автоматического управления
Из статьи мы узнали кратко, но содержательно про элементарные звенья
Комментарии
Оставить комментарий
Математические основы теории автоматического управления
Термины: Математические основы теории автоматического управления