Лекция
Привет, Вы узнаете о том , что такое кибернетические понятия, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое кибернетические понятия, предмет теории управления , настоятельно рекомендую прочитать все из категории Математические основы теории автоматического управления.
1.1.1. Процессы и сигналы. Динамическим процессом или движением, называется развитие во времени некоторого физического явления. К процессам относятся движения механизмов, тепловые явления, экономические процессы и т.д.
Процессы порождают информационные потоки, т.е. вторичные процессы, несущие информацию о первичном динамическом процессе. Процесс, содержащий информацию о развитии физического явления (первичном процессе) называется сигналом
т.е. вторичные процессы, несущие информацию о первичном динамическом процессе. Процесс, содержащий информацию о развитии физического явления (первичном процессе) называется сигналом
При рассмотрении сигнала принято различать его информационное содержание (информацию о первичном процессе) и физическую природу соответствующего вторичного процесса (носителя). В зависимости от физической природы носителя можно выделить акустические, оптические, электрические и электромагнитные сигналы. В общем случае, природа физического носителя не совпадает с природой первичного процесса.
Замечание 1.1. Сигналы как и порождающие их процессы существуют вне зависимости от наличия измерителей или наблюдателя.
В различных областях науки и техники приняты свои определения и подходы к изучению сигналов. Рассматриваемая здесь кибернетическая трактовка этого понятия предусматривает отказ от изучения физических особенностей как первичного процесса, так и носителя сигнала. Сигнал отождествляется с информацией об изменении физических переменных изучаемого процесса. При этом учитывается, что по различным причинам реальный сигнал не содержит всей информации о развитие физического явления, а, с другой стороны, может содержать постороннюю информацию. На информационное содержание сигналов оказывают влияние способы их кодирования, шумы и эффекты квантования.
В зависимости от способа кодирования различают аналоговые и цифровые сигналы. Для аналоговых сигналов интенсивность физического носителя пропорциональна (аналогична) изучаемой физической переменной, в то время как в цифровых сигналах информация представлена в виде чисел (например, в форме параллельных и последовательных двоичных кодов).
Методы преобразования, кодирования и передачи информации специально изучаются в прикладной теории информации. В теории управления представляет интерес насколько закодированная информация адекватна рассматриваемой физической переменной. Этот вопрос связан с понятиями идеального и реального сигнала.
Идеальный сигнал с информационной точки зрения тождествен некоторой физической переменной x(t), в то время как реальный сигнал можно представить в виде
x'(t) = x(t)+ (t),
(t),
где (t) - помеха измерения или шум, т.е. посторонняя информация о канале связи, внешней среде или измерителе.
С понятием реального сигнала связаны вопросы идентификации (оценивания) динамических процессов по текущим измерениям x'(t) и, в частности следующие задачи:
 (t) изучаемого процесса x(t); (t-
(t) изучаемого процесса x(t); (t- ), где - интервал запаздывания; (t+c ).
), где - интервал запаздывания; (t+c ).Задачи оценивания первичного процесса по реальным измерениям рассматриваются в теории оценивания (идентификации).
Информационное содержание сигнала зависит и от эффектов квантования. По характеру изменения во времени процессы и сигналыподразделяются на непрерывные и дискретные. К последним, в свою очередь, относятся процессы квантованные по уровню и процессы квантованные по времени.
Развитие непрерывного неквантованного) процесса характеризуется переменной x(t), принимающей произвольные значения из числовой области X и определенной в любые моменты времени t > 0. К непрерывным процессам относится непрерывное механическое движение, электрические и тепловые процессы.
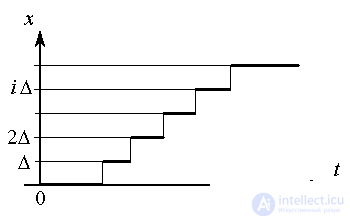
Развитие дискретного (квантованного по уровню) процесса характеризуется переменной x(t), принимающей строго фиксированные значения xi , i=1,2..., и определенной в любые моменты времени t > 0. В большинстве практических случаев можно положить
xi = i  x , i=
x , i= ,
,
где x - приращение или уровень дискретности, n - число допустимых состояний.
К процессам квантованным по уровню можно отнести:
Замечание 1.2. В тех случаях, когда число состояний n достаточно велико или интервал дискретности x достаточно мал, квантованием по уровню пренебрегают.
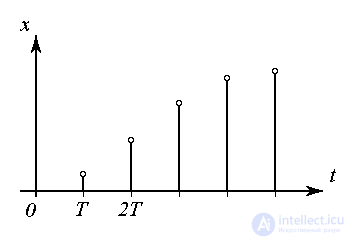
Развитие дискретного(квантованного по времени) процесса, или процесса дискретного времени, характеризуется переменной x(t) принимающей произвольные значения x и определенной в фиксированные моменты времени ti ,i=0,1,2..... Во многих случаях
t=i T, i  0,
0,
где Т- интервал квантования (дискретности). К таким процессам относятся:
Замечание 1.3. При достаточно малых (по сравнению с длительностью других процессов) интервалах T дискретностью по времени пренебрегают и квантованный по времени процесс относят к процессам непрерывного времени.
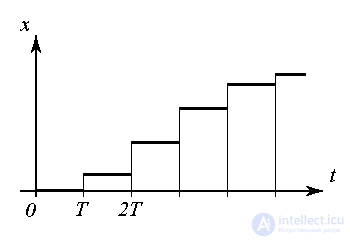
Замечание 1.4. К дискретным обычно относят также кусочно-постоянные процессы и сигналы, которые характеризуются переменной x(t), скачкообразно изменяющиеся в фиксированные моменты времени ti .
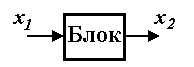
1.1.2. Кибернетические блоки. Кибернетический блок ("черный ящик") - это блок, для которого установлены связанные причинно-следственным отношением входные и выходные сигналы. Об этом говорит сайт https://intellect.icu . Выходной сигнал блока x2(t) несет информацию о внутреннем процессе, причиной которого является входной сигнал x1 (t).
Замечание 1.5. В определении блока отсутствует упоминание физической природы процессов внутри блока, что и определило термин "черный ящик".
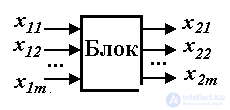
В зависимости от числа входных и выходных сигналов различают одноканальные блоки, т.е. блоки с одним входом и одним выходом, и многоканальные с несколькими входными и выходными сигналами. Блоки, у которых отсутствуют входные сигналы называются автономными. По типу сигналов различают непрерывные, дискретные и дискретно-непрерывные блоки.
Для описания кибернетического блока используется одна из форм аналитического описания связи входных и выходных сигналов. Для простейших блоков такое описание может быть получено в виде алгебраического или трансцендентного уравнения:
(1.1) x2 = f(x1),
где f (· ) - функция. В более общем случае для описания блоков используются дифференциальные и разностные (рекурентные) уравнения, автоматные алгоритмы, т.е. выражения вида
(1.2) x2(t) = F(x 1(t)),
где F(· ) - функциональный оператор.
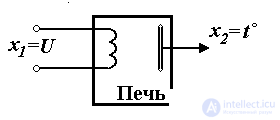
Рис. 1.1. Электронагревательная печь
Пример 1.1. Рассмотрим электронагревательную печь, т.е. камеру (рис. 1.1), температура в которой t o регулируется с помощью электрического нагревателя. Входным сигналом рассматриваемого блока является напряжение нагревателя: x1(t)=U(t), а выходным - температура: x2(t)=to (t). Связь выхода и входа описывается функциональным оператором (дифференциальным уравнением):
(1.3) 
где T - постоянная времени, K - коэффициент передачи. Если напряжение нагревателя постоянно, т.е. x1=U=const, то выходная переменная находится как
 .
.
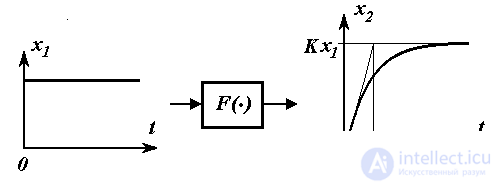
Рис. 1.2.
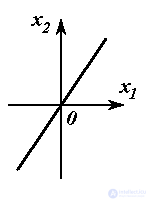
В установившемся режиме, т.е. после окончания процессов в печи при  , связь выходного и входного сигналов описывается простейшим алгебраическим уравнением вида (1.1)
, связь выходного и входного сигналов описывается простейшим алгебраическим уравнением вида (1.1)
(1.4)  .
.
Аналогичные выражения для описания связей входных и выходных переменных получаются для электрической RC-цепи (рис. 1.3). Здесь x1(t)=U1(t) - входное напряжение, x2(t)=U2(t) - выходное напряжение схемы, T=RC и K=1.
Наконец, те же уравнения (1.1) и (1.2) описывают процесс разгона электродвигателя (рис. 1.4), для которого x1(t)=U(t) - входное напряжение, а x2(t)= (t) - скорость вращения вала.
(t) - скорость вращения вала.
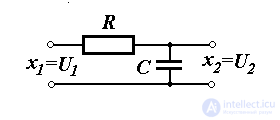
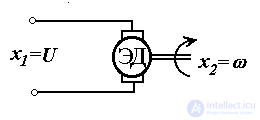
Рис. 1.3. RC - цепь Рис. 1.4. Электродвигатель
С понятием кибернeтического блока связаны следующие задачи:
1.1.3. Кибернетические системы. Кибернетическая система - это упорядоченная совокупность (система) кибернетических блоков, связанных между собой информационными каналами.
Замечание 1.6. Понятие системы предполагает появление нового качества, вообще говоря, отличного от свойств отдельных ее элементов. Связи, упомянутые в определении, носят сигнальный (информационный) характер.
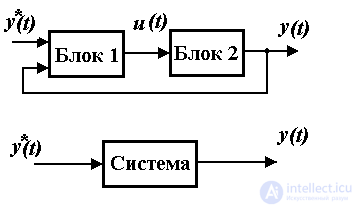
Для описания системы необходимо получить аналитические зависимости, описывающие каждый из блоков (Блок 1, Блок 2 и т.д.) в отдельности и связи между ними. После эквивалентных преобразований может быть получено общее (эквивалентное) описание системы как составного кибернетического блока с входным сигналом у*(t) и выходным сигналом y(t). (см. пп. 2.4 и 4.3)
Таким образом, кибернетическая система является сложным блоком. В зависимости от числа входных и выходных сигналов различают одноканальные системы (с одним входом и одним выходом), и многоканальные системы с несколькими входными и выходными сигналами. Системы, у которых отсутствуют входные сигналы называются автономными.
По типу сигналов в системе (или блоков) различают: непрерывные, дискретные и дискретно-непрерывные системы, причем последние содержат как непрерывные, так и дискретные блоки (см. ниже).
Определение кибернетической системы позволяет ввести следующие задачи:
Известна также прикладная задача проектирования системы, включающая в себя задачу управления (синтеза системы), ее комплектации (выбора физических элементов), разработки прикладных программ управляющих ЭВМ и т.д.
Наиболее распространенным типом дискретно-непрерываных систем являются цифровые системы, в состав которых входят цифровые вычислительные устройства (ЭВМ и цифровые контроллеры).
1.1.4. Дискретно-непрерывные (цифровые) системы. Рассмотрим простейшую цифровую систему управления вращением кинематического механизма (рис. 1.5). В состав системы входит простейший кинематический механизм КМ, электродвигатель ЭД, усилитель У, цифро-аналоговый преобразователь ЦАП и управляющая вычислительная машина ЭВМ.
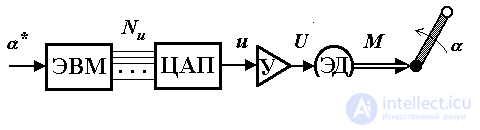
Рис. 1.5. Система управления вращением кинематического механизма
Работа системы происходит следующим образом. Информация о требуемом угле поворота (задание)  * поступает на ЭВМ, где осуществляется расчет необходимого управляющего сигнала Nu (t). Последний представлен в виде цифрового кода, который преобразуется в аналоговый управляющий сигнал u(t) c помощью цифро-аналогового преобразователя. Так как мощности полученного сигнала u(t) не достаточно для приведения в действие электродвигателя, то требуется подключения усилителя мощности У. Выходное напряжение усилителя U(t), будучи приложено к двигателю, приводит к созданию необходимого движущего момента (сигнал M(t)). Момент электродвигателя прикладывается к валу кинематического механизма и обеспечивает его вращение, т.е. изменение углового положения (t) от начальной величины (0) до заданного значения *.
* поступает на ЭВМ, где осуществляется расчет необходимого управляющего сигнала Nu (t). Последний представлен в виде цифрового кода, который преобразуется в аналоговый управляющий сигнал u(t) c помощью цифро-аналогового преобразователя. Так как мощности полученного сигнала u(t) не достаточно для приведения в действие электродвигателя, то требуется подключения усилителя мощности У. Выходное напряжение усилителя U(t), будучи приложено к двигателю, приводит к созданию необходимого движущего момента (сигнал M(t)). Момент электродвигателя прикладывается к валу кинематического механизма и обеспечивает его вращение, т.е. изменение углового положения (t) от начальной величины (0) до заданного значения *.
Отметим, что сигналы в рассмотренной системе различны по физической природе и способам кодирования. В силу дискретности процессов в цифровых вычислительных устройствах и конечности их разрядной сетки, ЭВМ относится к дискретным блокам, а сигнал на ее выходе Nu (t) является квантованным по времени и уровню.
Система, приведенная на рис. 1.5, относится к классу разомкнутых систем управления, в которых задача управления (изменения состояния КМ) решается без учета реального положения механизма (t). Это вызывает, во-первых, определенные сложности расчета управляющего сигнала u (t), обеспечивающего заданное угловое перемещение механизма *, а во-вторых, не позволяет гарантировать достаточной точности управления в условиях действия на механизм сил тяжести и трения. Указанные недостатки устраняются в замкнутых системах, в состав которых входит подсистема контроля и обратные связи.
Дополним рассмотренную ранее систему следующими элементами (рис. 1.6): измерительным потенциометром, выходное напряжение которого u (t), пропорционально текущему значению (t), усилителем У и аналого-цифровым преобразователем АЦП, осуществляющим преобразование сигнала U (t) на выходе усилителя в цифровой код N (t), поступающий далее на ЭВМ. Эти элементы в совокупности с ЭВМ составляют цифровую подсистему контроля вращения кинематического механизма, обеспечивающую измерение текущего положения КМ и ввод информации в управляющую вычислительную машину.
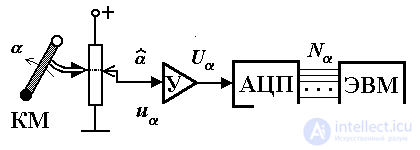
Рис. 1.6. Подсистема контроля
Отметим дискретный характер сигнала (цифрового кода)N (t), что обусловлено функциональными особенностями АЦП, и, следовательно, дискретно-непрерывный тип рассмотренной подсистемы контроля.
Объединение разомкнутой системы управления (рис. 1.5) и подсистемы контроля (рис. 1.6) позволяет получить замкнутую систему управлению. Укрупненная схема такой системы представлена на рис. 1.7. Она включает в свой состав цифровой блок управления и электро-механический блок (ЭМ блок). Последний включает аналоговые элементы системы (кинематический механизм, двигатель, усилители и измерительный потенциометр) и по типу сигналов относится к непрерывным блокам. В блок управления входит ЭВМ и устройства ввода-вывода информации (УВВ), или сопряжения с объектом (УСО), представленные цифро-аналоговыми и аналого-цифровыми преобразователями и обеспечивающие сопряжение цифровой и аналоговой частей системы управления.
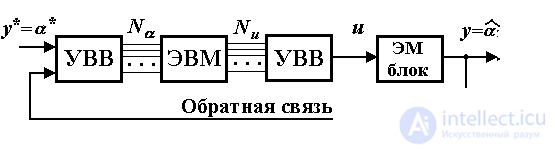
Рис. 1.7. Замкнутая система управления
В функции цифрового блока управления входит расчет управляющего сигнала u(t ) на основании задания *и текущей информации о положении кинематического механизма (t ). Простейший алгоритм расчета (пропорциональный алгоритм управления) имеет вид
(1.5) u(t) = K ( *- (t)),
где K - постоянный коэффициент. При расчетах по формуле (1.5) управляющий сигнал пропорционален текущему значению отклонения *- (t>), что обеспечивает:
t)  *; * = (t ) в силу u(t)= 0 и, следовательно, нулевых значений напряжения на выходе усилителя мощности U вращающего момента М .
*; * = (t ) в силу u(t)= 0 и, следовательно, нулевых значений напряжения на выходе усилителя мощности U вращающего момента М .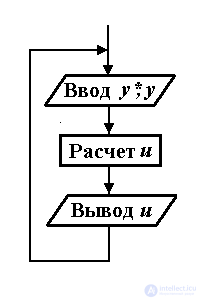
Укрупненный алгоритм работы ЭВМ в режиме реального времени представлен на рис. 1.8. Он включает блок ввода данных (задания у* = * и текущего значения у = )), блок расчета текущего значения управления u по формуле (1.5) и блок вывода данных (полученного значения u ). Циклическое выполнение алгоритма обеспечивает возможность обновления выходных данных в процессе работы системы при изменения входных данных (текущего значения ).
Циклический характер выполнения программы служит причиной временной дискретности сигналов N и Nu и цифрового устройства управления в целом. При этом интервал квантования приближенно оценивается временем, необходимым для выполнения одного цикла программы.
Отметим, что рассмотренная система управления является составным кибернетическим блоком с входным сигналом у* = * и выходным сигналом y= (t ). Система содержит обратную связь по выходной переменной (сигнал у поступает обратно на вход системы). Ее аналитическое описание (связь у* и y ) можно получить на основании известных приемов преобразования динамических систем (см. пп. 2.4 и 4.3), используя описание электромеханического блока (связь сигналов y и u ) и формулу (1.5).
1.1.5. Кибернетика и предмет теории автоматического управления. Понятие кибернетики как науки об управлении и связи в живом (природе и обществе) и машинах было введено в 1948 году Норбертом Винером. В настоящее время в виде отдельных дисциплин можно выделить следующие разделы кибернетики:
В зависимости от области применения различают техническую кибернетику, т.е. кибернетику в технических приложениях, биокибернетику, медицинскую кибернетику, экономическую кибернетику и др.
Теория автоматического управления (ТАУ) - наука об управлении, изучающая задачи анализа и синтеза систем автоматического управления (САУ), как одного из классов кибернетических систем. Основные разделы ТАУ - это:
Современная теория управления занимает одно из ведущих мест в технических науках и, в то же время, относится к одной из отраслей прикладной математики. Теория и практика автоматического управления связана с вычислительной техникой. В этой связи следует отметить, что исследование САУ включает следующие важнейшие этапы:
Первый проект по практической реализации цифровых систем был выдвинут в 1950 году американскими фирмами ТRW и Texaсo. В данном проекте ЭВМ использовалась как средство автоматизации химических процессов. Было установлено, что для успешной реализации цифрового управления требуется
Эти выводы определили в 60-ые годы интенсивное развитие математических методов управления, ориентированных на использованием ЭВМ. Однако их практическая реализация натолкнулась на ряд препятствий, среди которых низкое быстродействие существовавших средств вычислительной техники, их значительные габариты и стоимость, а также низкая надежность.
Решение проблемы было предложено в середине 70-ых годов с появлением серийных и достаточно дешевых микропроцессоров и микро-ЭВМ, которые могли обеспечить требуемое быстродействие управления, имели малые габариты и высокую надежность. Микропроцессорные устройства начинают постепенно вытеснять традиционные электрические и электронные средства управления (регуляторы) в простейших автоматических системах. Более того с развитием микропроцессорной техники появилась возможность реализации более
сложных алгоритмов для решения нетрадиционных задач управления.
Проектирование, внедрение и эксплуатация современных САУ требует взаимодействия специалистов различных профилей:
Прочтение данной статьи про кибернетические понятия позволяет сделать вывод о значимости данной информации для обеспечения качества и оптимальности процессов. Надеюсь, что теперь ты понял что такое кибернетические понятия, предмет теории управления и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Математические основы теории автоматического управления
Ответы на вопросы для самопроверки пишите в комментариях, мы проверим, или же задавайте свой вопрос по данной теме.

Комментарии