Лекция
Привет, Вы узнаете о том , что такое модели электромеханических объектов, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое модели электромеханических объектов , настоятельно рекомендую прочитать все из категории Математические основы теории автоматического управления.
Типовой электромеханический объект (ЭМО) содержит многоканальный исполнительный электропривод (ЭП , см. п. 1.2.1) и управляемый кинематический механизм (КМ). В качестве кинематических механизмов электромеханических систем выступают многокоординатные механизмы станков, роботов, поточных линий, рулевые устройства летательных аппаратов и транспортных средств, подвижные элементы автоматического оборудования и приборов. Электропривод служит для преобразования маломощных электрических сигналов, поступающих от устройства управления (управляющей ЭВМ), в механические воздействия (силы и моменты) достаточной мощности, прикладываемые к нагрузке, т.е. к кинематическому механизму. Каждый канал привода (см. рис. 4.1) обеспечивает поступательное или вращательное движение соответствующего звена КМ и содержит усилитель мощности входного сигнала (У), электродвигатель (ЭД) и редуктор.
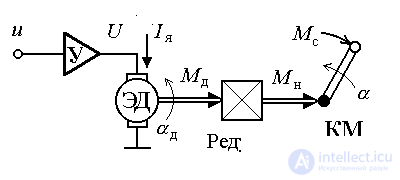
Рис. 4.1. Электромеханических объект
Рассмотрим математическую модель одноканального электромеханического объекта (рис. 4.1), в состав которого входит одно вращательное звено механизма и одноканальный электропривод. Выходом объекта служит угловое перемещение КМ y=  , а его входом - управляющий сигнал u ; момент сопротивления М c , приложенный к валу нагрузки, выступает в качестве возмущающего воздействия : f = - Mc.
, а его входом - управляющий сигнал u ; момент сопротивления М c , приложенный к валу нагрузки, выступает в качестве возмущающего воздействия : f = - Mc.
4.1.1. Точная модель ЭМО . Для построения математической модели объекта используются известные из физики уравнения, описывающие его функциональные элементы.
Кинематический механизм описывается уравнениями, полученными на основании второго закона Ньютона:
(4.1)  ,
,
(4.2) 
где  - скорость вращения вала КМ,
- скорость вращения вала КМ,  - вращающий момент приложенный к валу,
- вращающий момент приложенный к валу,  - приведенный момент сопротивления, J - приведенный момент инерции.
- приведенный момент сопротивления, J - приведенный момент инерции.
На структурной схеме (рис. 4.2) механизм представлен двумя интегрирующими звеньями и пропорциональным звеном с коэффициентом 1/J.
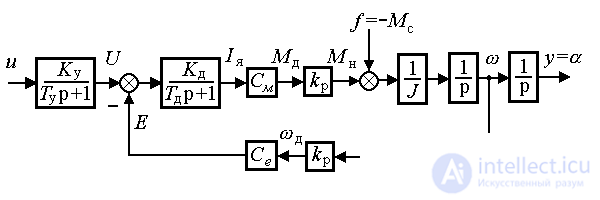
Рис. 4.2. Структурная схема ЭМО
Редуктор обеспечивает преобразование (обычно усиление) момента двигателя M д в момент нагрузки M н по формуле
(4.3)  ,
,
где k р - коэффициент передачи редуктора ( k р =1/i р , где i р - передаточное отношение редуктора). При этом скорости вращения ЭД д и вала КМ связаны соотношением
(4.4) = k р .
На структурной схеме редуктор представлен пропорциональными звеньями.
Модель электродвигателя задается моментной характеристикой
(4.5)  ,
,
где I я - ток якоря, C М - механическая постоянная, и уравнением якорной цепи
(4.6)  ,
,
где U - напряжение, приложенное к якорю ЭД (выход усилителя мощности), E - противо - ЭДС , L и R - индуктивность и сопротивление якорной цепи, соответственно. Об этом говорит сайт https://intellect.icu . Последнее выражение удобно привести к виду
(4.7)  ,
,
где T д = L /R - постоянная времени, а K д =1/L - коэффициент передачи якорной цепи. Противо-ЭДС определяется известной формулой
(4.8) E = Ce д = Ce k р ,
где C е - электрическая постоянная.
На структурной схеме электродвигатель представляется апериодическим звеном (4.7) и двумя пропорциональными звеньями с коэффициентами передачи Се и См .
Усилитель мощности является апериодическим звеном, описываемым уравнением
(4.9)  ,
,
где T у и Ку - постоянная времени и коэффициент усиления, соответственно.
4.1.2. Построение моделей ВВ и ВСВ. С использованием методов преобразования структурных схем (см. п. 2.4) по уравнениям (4.1)-(4.9) может быть найдена связь выхода объекта y = и его входов u и f = - M с , т.е. модель вход-выход ЭМО вида [ М2 ]:
(4.10) (p4 +a1 p3 +a2 p2 +a3 p)y(t)=b0 u +(d0 p2 +d1 p +d 2)f,
где a1, a2, a3, b0, d0, d1, d 2 - постоянные коэффициенты. Модель (4.10) приводится к виду [М3]:
(4.11)  ,
,
где W(p) и Wf (p) - передаточные функции по управляющему воздействию и возмущению, определяемые выражениями
 ,
,  .
.
Модель вход-состояние-выход (ВСВ) строится либо на основе модели (4.10), либо непосредственно с использованием полученных ранее уравнений функциональных элементов объекта и схемы рис.4.2. В последнем случае уравнения (4.1)-(4.9) преобразуются к системе 4-х дифференциальных уравнений (форма Коши) вида:
(4.12) ,
(4.13)  ,
,
(4.14)  ,
,
(4.15)  ,
,
где aij, b, d - постоянные коэффициенты. Вектор состояния определяется как
(4.16)  ,
,
а возмущающее воздействие - f = - Mc . После этого уравнения состояния (4.12) - (4.15) записываются в векторно-матричной форме
[М6f]  ,
,
а уравнение выхода получается из выражения y=x1 и записывается в векторно-матричной форме
[М7]  .
.
Переходные процессы системы при единичном входном воздействии u=1(t ) (переменные состояния и само входное воздействие) представлены на рис. 4.3.
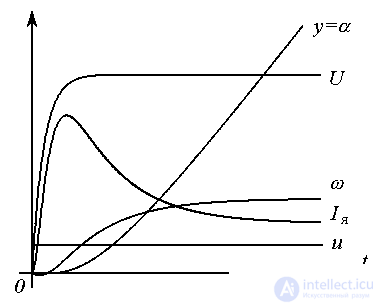
Рис. 4.3. Переходные процессы электромеханического объекта
4.2.3. Приближенная модель ЭМО . Для случая, когда инерционность электрических процессов в электродвигателе и усилителе мощности не значительна по сравнению с инерционностью механических процессов , соотвествующими постоянными времени T у и T д можно пренебречь. Полагая T у = T д = 0 перепишем уравнения (4.7), (4.9) в виде
(4.17) I я = K д (U-E),
(4.18) U = K у u.
Тогда уравнение (4.2) после подстановки выражений (4.3), (4.5), (4.6), (4.17) и (4.18) принимает вид
(4.19) 
или
(4.20) 
где Т, K, Kf - постоянные коэффициенты.
Таким образом, приближенная модель ЭМО описывается уравнениями (4.1), (4.20) и представлена интегрирующим, апериодическим и двумя пропорциональными звеньями (рис.4.4). Модель вход-выход описывается операторным уравнением вида

Рис. 4.4. Схема приближенной модели ЭМО
(4.21) (p2 +a p)y(t)=b u +df,
где a=1/T, b=K/T, d =Kf/T - постоянные коэффициенты, и приводится к виду (4.11) , где
 ,
,  .
.
Для получения модели ВСВ определяется вектор состояния
 ,
,
и уравнения (4.1), (4.20) переписываются в виде
(4.22)  ,
,
(4.23)  ,
,
Далее система уравнений ( 4.22 ), (4.23), а также выражение y = x1 переписываются в матричном виде [М6f], [M7].
Переходные процессы для упрощенной модели ЭМО при единичном входном воздействии u=1(t) представлены на рис. 4.5.
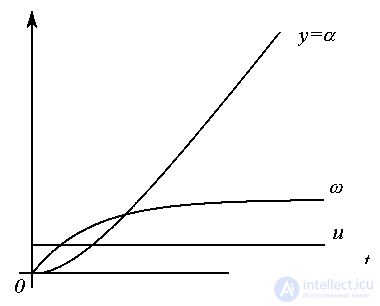
Рис. 4.5. Переходные процессы приближенной модели ЭМО
Прочтение данной статьи про модели электромеханических объектов позволяет сделать вывод о значимости данной информации для обеспечения качества и оптимальности процессов. Надеюсь, что теперь ты понял что такое модели электромеханических объектов и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Математические основы теории автоматического управления
Из статьи мы узнали кратко, но содержательно про модели электромеханических объектов
Комментарии
Оставить комментарий
Математические основы теории автоматического управления
Термины: Математические основы теории автоматического управления