Лекция
Привет, Вы узнаете о том , что такое локальные задачи управления, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое локальные задачи управления , настоятельно рекомендую прочитать все из категории Математические основы теории автоматического управления.
локальные задачи управления устанавливают желаемый характер изменения переменных объекта управления. В зависимости от структуры объекта различают задачи одноканального и мноканального управления (рис. 1.20).
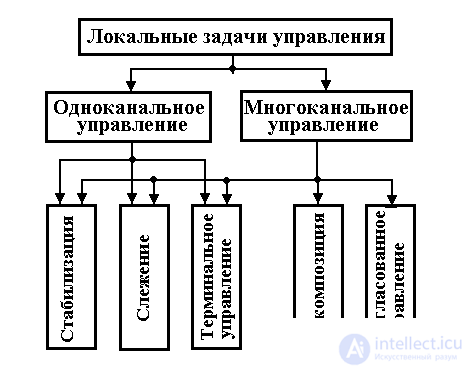
Рис. 1.20
1.4.1. Одноканальное управление и понятие качества системы. В одноканальных задачах управления, к которым относятся задачи стабилизации, слежения и терминального управления, выходная переменная y(t ) является скалярной функцией времени.
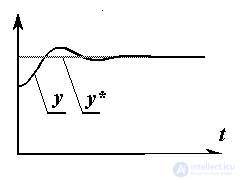
Задача стабилизации, или регулирования, формулируется как задача поддержание выходной переменной на заданном уровне y*
y = y* = const.
Задача слежения - это задача соблюдения заданного закона y*(t ) изменения переменной y , т.е.
y = y*(t).
При этом различают:
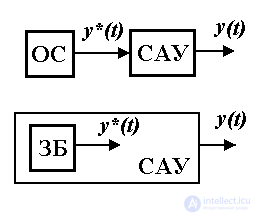 генерируется специальным задающим блоком, входящим в состав устройства управления САУ.
генерируется специальным задающим блоком, входящим в состав устройства управления САУ.Система автоматического управления, решающая задачи слежения называется следящей системой. Сигнал y*(t ), определяющий требуемый закон движения, системы называется задающим воздействием. Сигнал
 (t) = y*(t)-y(t),
(t) = y*(t)-y(t),
характеризующий текущее значение отклонения выходной переменной от задающего воздействия называется рассогласованием, ошибкой, или отклонением. При этом значение 0 = (0) = y*(0) - y (0) - начальное рассогласование системы. Тогда задачи стабилизации и слежения иначе могут быть сформулированы как задачи поддержания нулевого значения рассогласования, т.е.  .
. 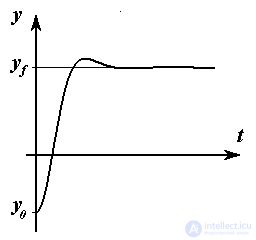
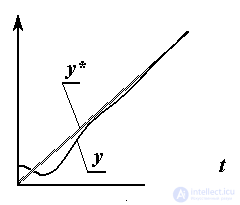
Задача терминального управления заключается в "перемещении" объекта управления в заданную (обычно удаленную) конечную (терминальную) точку yf :
y  yf.
yf.
Основная особенность терминальной задачи, отличающая ее от задачи стабилизации, заключается в том, что величина начального отклонения 0 = yf - y0 достаточно велика. Об этом говорит сайт https://intellect.icu . Это обуславливает необходимость выбора особой стратегии управления (минимизации быстродействия или энергетических затрат, необходимости соблюдения ограничений на управляющие сигналы и переменные состояния и т.д.).
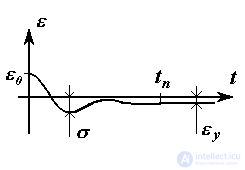
Полное устранение рассогласования в реальных системах не достигается, причиной чему служат ненулевые начальные значения 0 , быстрые изменения задающих воздействий y(t ), а также влияние возмущающих воздействий f(t ). Для оценки эффективности решения задач управления вводятся так называемые показатели качества управления. Различают динамические показатели, определяющие качество переходного режима работы системы, к которым относятся количественные (численные) оценки быстродействия и колебательности системы, и точностные показатели, определяющие погрешность системы в установившемся режиме, т.е. по окончанию переходного процесса. К динамическим показателям относится время переходного процесса t п и перерегулирование  , а к точностным - абсолютная погрешность стабилизации или слежения
, а к точностным - абсолютная погрешность стабилизации или слежения
 .
. 1.4.2. Многоканальное управление. В многоканальных задачах управления выходом объекта служит векторная переменная (вектор выхода) y = y(t)= {yj(t)} и, следовательно, векторными переменными являются также задающее воздействие (вектор задания) y*= y*(t) = {y*j(t)} и рассогласование (вектор ошибок) = (t)={ j(t) }. Формулировка основных задач многоканального управления ( стабилизации, слежения и терминального управления ) практически не отличается от приведенной выше. Кроме них для многоканальных объектов возникает ряд специфических задач, среди которых выделим задачи декомпозиции и согласованного управления.
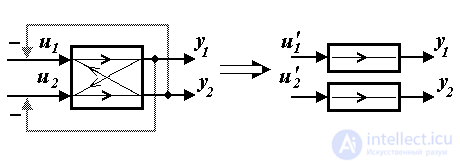
Рис. 1.21. Декомпозиция многоканальной системы
Задача декомпозиции заключается в устранении взаимного влияния каналов системы с целью сведения задачи управления многосвязным объектом к нескольким более простым одноканальным задачам. Решение задачи предусматривает создание дополнительных (искусственных) перекрестных связей между каналами системы, которые компенсируют нежелательное действие внутренних связей объекта управления (рис. 1.21). Это достигается с помощью соответствующих алгоритмов управления, т.е. выбора управляющих воздействий uj.
Задача согласованного управления наоборот предусматривает организацию принудительного взаимодействия каналов с целью поддержания заданных функциональных соотношений (условий согласования) выходных переменных yj(t) вида:
(1.8)  (y1 ,y2 ,...ym) = 0,
(y1 ,y2 ,...ym) = 0,
где - заданная функция размерности m-1 . Решение также требует введения искусственных перекрестных связей (рис. 1.22), т.е. координации управляющих воздействий uj.
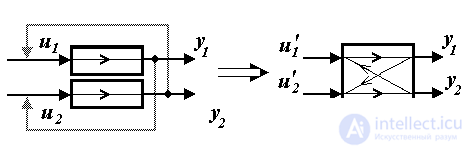
Рис. 1.22. Согласование выходных переменных
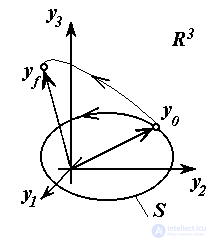 Наиболее очевидные задачи терминального и согласованного управления возникают при управлении пространственным движением многозвенных механических объектов (роботов, станочных механизмов, транспортных средств). Здесь в качестве выходных переменных системы обычно выступают декартовы координаты yj рабочей точки механизма в трехмерном физическом пространстве R3 или R2 , а задача перемещения рабочей точки механизма из начального положения y0={yj0} в точку yf={yjf}относится к многоканальным терминальным задачам. Если при этом возникает необходимость следования определенной траектории движения S , то возникает задача согласования выходных переменных, в которой условия согласования (1.8) это не что иное, как уравнение S в физическом пространстве.
Наиболее очевидные задачи терминального и согласованного управления возникают при управлении пространственным движением многозвенных механических объектов (роботов, станочных механизмов, транспортных средств). Здесь в качестве выходных переменных системы обычно выступают декартовы координаты yj рабочей точки механизма в трехмерном физическом пространстве R3 или R2 , а задача перемещения рабочей точки механизма из начального положения y0={yj0} в точку yf={yjf}относится к многоканальным терминальным задачам. Если при этом возникает необходимость следования определенной траектории движения S , то возникает задача согласования выходных переменных, в которой условия согласования (1.8) это не что иное, как уравнение S в физическом пространстве.
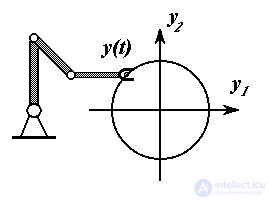
Пример 1.6. Так называемое контурное движение свата простейшего робота-манипулятора в плоскости R2 осуществляется по отрезкам прямых и окружностей, заданной в виде
(1.9)
с 1 y1 + с 2 y2 +с = 0
или
 ,
, соответственно. Эти уравнения и определяют условия согласования выходных переменных рассматриваемой многоканальной системы.
1.4.3. Задачи контроля. Вспомогательные задачи определения (идентификации) неизмеряемых переменных и неизвестных параметров системы относятся к задачам автоматического контроля. Это:
Прочтение данной статьи про локальные задачи управления позволяет сделать вывод о значимости данной информации для обеспечения качества и оптимальности процессов. Надеюсь, что теперь ты понял что такое локальные задачи управления и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Математические основы теории автоматического управления
Из статьи мы узнали кратко, но содержательно про локальные задачи управления
Комментарии