Лекция
Привет, Вы узнаете о том , что такое структура сау, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое структура сау, компоненты сау, система автоматического управления , настоятельно рекомендую прочитать все из категории Математические основы теории автоматического управления.
система автоматического управления содержит следующие функциональные компоненты (рис.1.9):
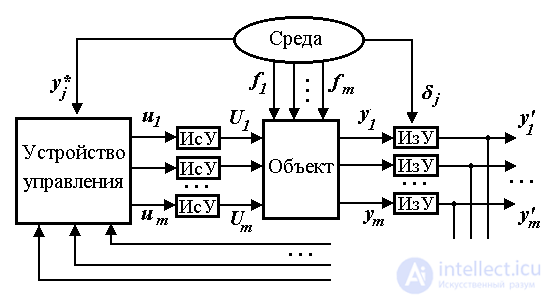
Рис. 1.9. Функциональная схема САУ
Объектами технических систем служат: кинематические механизмы, электрические, химические, тепловые процессы и другие технологические процессы.
Текущее состояние объекта характеризуется переменными состояния x i=xi(t ) (точное определение см. п. 3.1.1), к которым относятся физические величины:
и т.д.
Переменные состояния объединяются в вектор состояния
x(t) = {x i} = .
.
К регулируемым, или выходным, переменным yj =yj(t) относятся те переменные объекта (управляемого процесса), по отношению к которым формулируется основная задача управления. Выходные переменные объединяются в вектор выхода
y = {yj}= .
.
Для многозвенных кинематических механизмов вектор выхода обычно представлен декартовыми координатами рабочей точки механизма (например, схвата робота манипулятора, см. пример 1.2).
Входами объекта являются управляющие органы, к которым прикладываются воздействия Uj исполнительных устройств системы.
Это - входные оси кинематических механизмов, входные схемы электрических систем, нагревательные элементы и вентили тепловых и химических процессов, к которым приложены силы или моменты  сил электроприводов, электрические напряжения и т.д., вызывающе движение (развитие) управляемого процесса.
сил электроприводов, электрические напряжения и т.д., вызывающе движение (развитие) управляемого процесса.
Объекты с одним входом и одним выходом ( m=1 ) называются одноканальными. Соответственно, к многоканальным относят объекты с несколькими входами и/или выходами. Последние могут иметь автономные
(независимые друг от друга) каналы. Часто каналы многоканального объекта оказываются взаимозависимы и такой объект 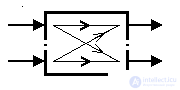 называются многосвязным .
называются многосвязным .
К внешней среде системы управления относятся внешние процессы, оказывающие влияние на поведение управляемого объекта. Среда является источником следующих факторов (воздействий):
 j(t ) (см. п. 1.1.1);
j(t ) (см. п. 1.1.1);
К возмущающим относят воздействия, препятствующие функционированию объекта (силы сопротивления для кинематических механизмов, температура окружающей среды для тепловых процессов и т.д.). Возмущающие воздействия объединяются в вектор возмущений
f= {fj} = .
.
Измерительные устройства (датчики) предназначены для получения информации об объекте и внешней среде у j , т.е. для электрического измерения переменных состояния, выходных переменных, внешних задающих воздействий и т. д. Различают следующие типы измерительных устройств:

Исполнительные устройства - это устройства, предназначенные для усиления маломощных управляющих сигналов uj и создания энергетических воздействий Uj на входах объекта, т.е. управляемые источники механической, электрической или тепловой энергии. Наиболее распространенный тип электромеханического исполнительного устройства - это электропривод или управляемый преобразователь электрической энергии в механическую (см. пример 1.2).
Устройство управления - это вычислительный блок обрабатывающий полученную с помощью измерителей текущую информацию о состоянии объекта и внешней среды и формирующий управляющие воздействия uj , т.е. маломощные информационные сигналы, поступающие на исполнительные устройства объекта. Управляющие воздействия объединяются в вектор управления
u = {uj} =  .
.
В функции устройства управления входит:
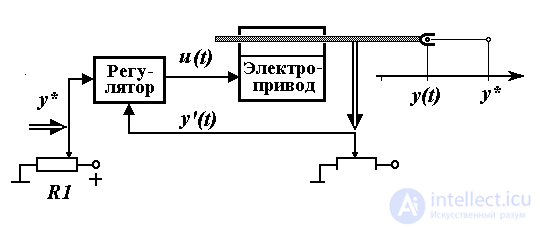
Рис. 1.10. Система управления звеном робота манипулятора.
Функциональная схема простейшей одноканальной системы управления звеном робота манипулятора (РМ) представлена на рис. 1.10, где введены следующие обозначения:
y(t) - текущее положение звена РМ,
y* - заданное положение,
y'(t) - измеренное положение,
u(t) - управляющий сигнал.
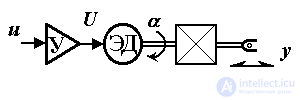
Рис. 1.11. Электропривод
Желаемое положение звена вводится в систему с помощью задающего потенциометра R1 , который является простейшим задающим блоком (ЗБ). Измерительный потенциометр R2 выполняет функции датчика положения (измерительного устройства). Исполнительным устройством является электропривод, состоящий из усилителя мощности У, электродвигателя ЭД и механической передачи (редуктор, шариковинтовая передача и т.д.), связанной с управляемым звеном РМ. Схема электропривода представлена на рис. 1.11, где U - напряжение на входе электродвигателя,  - угол поворота вала ЭД.
- угол поворота вала ЭД.
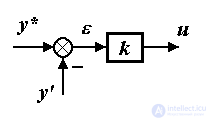
Важнейшим элементом системы является регулятор, который реализуется на базе аналоговых элементов (усилителей, сумматоров, интеграторов и т.д.) или цифровых схем (ЭВМ). Регулятор рассчитывает значения управляющего сигнала u(t ) на основании информации о заданном y* и реальным y(t ) (а точнее, измеренном y'(t )) положении звена. Простейший тип регулятора - пропорциональный, или П-регулятор, осуществляющий расчеты по формуле (алгоритму):
(1.6) u(t) = k  (t)
(t)
где k - коэффициент пропорциональности, - ошибка (отклонение, рассогласование) вычисляемая как.
(1.7) (t) = y(t) - y'(t).
Рассматриваемая система управления предназначена для решения терминальной задачи - задачи перемещения звена РМ в заданное конечное (терминальное) положение y*: y  y* , или, иначе, устранение ошибки положения
y* , или, иначе, устранение ошибки положения  .
.
Структурная схема системы управления положением, а также временные диаграммы, поясняющие ее работу, представлены на рис. 1.12, 1.13. Система содержит блок управления, состоящий из задающего блока и регулятора, а также исполнительное (электропривод) и измерительное устройство.
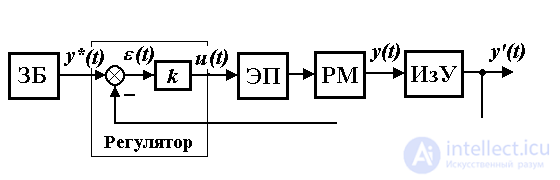
Рис. 1.12. Структурная схема системы управления положением
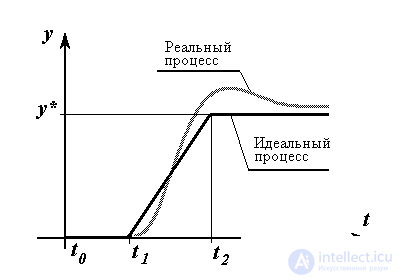
Рис. 1.13.
В переходном процессе можно выделить три этапа. В начале работы системы (от момента времени t0 до момента t1 ) предполагается, что задающая рукоятка потенциометра R1 и само звено РМ находятся в нулевом положении y=0 . Так как при этом движки задающего R1 и измерительного R2 потенциометров также занимают нулевые положения: y*=y'=0 , то ошибка отсутствует, управляющий сигнал u =0 и, поэтому электропривод находится в состоянии покоя. Второй этап - отработка задающего воздействия. В момент t1 задающая рукоятка переводится в положение y* , что приводит к появлению сигнала ошибки = y - y' и пропорционального ей управляющего сигнала u . Последний после усиления приводит в движение электродвигатель и, следовательно, звено РМ. В момент t2измерительный потенциометр R2 занимает положение y'=y* , сигнал ошибки опять принимает нулевое значение (t)=0 и система останавливается. На третьем этапе ( t>t2 ) система обеспечивает стабилизацию звена в положении y=y*.
Важно отметить, что реальное поведение системы будет отличаться от рассмотренной идеальной ситуации. Во-первых, в силу инерционных свойств ЭП и объекта (звена РМ) возможно получение колебательного процесса и перерегулирование системы, когда в процессе движения объект сначала проходит дальше заданного положения y=y* , а затем возвращается обратно. Числовые значения показателей колебательности и перерегулирования характеризуют динамические свойства системы и относятся к так называемым динамическим показателям ее качества (см. п. 1.4.1). Во-вторых, в реальных системах не обеспечивается абсолютная точность решения задачи управления - по окончанию переходного процесса (т.е. в установившемся режиме) положение РМ реальной системы будет отличаться от задания y* на величину установившейся ошибки у. Динамические и точностные показатели системы могут быть существенно улучшены с помощью достаточно совершенного алгоритма управления (регулятора).
Для обеспечения более плавного перемещения звена механизма в заданную точку часто используется режим слежения, в котором используется переменное задающее воздействие y*(t ). Такой режим требует использования более сложного задающего блока - программно или аппаратно реализованного генератора.
Для измерения механических переменных кроме простейших датчиков перемещения могут использоваться и другие измерительные устройства и сенсорные системы (тахогенераторы, оптические датчики перемещений, дальномеры и системы технического зрения).
Задача рассматриваемой системы управления заключается в таком перемещении звена, при котором его текущее положение отслеживает заданный закон, или y=y (t ), т.е. относится к классу задач слежения.
Пример 1.3. Система управления многозвенным манипуляционным роботом (рис. 1.14). Здесь в качестве ЗБ используются различного рода задающие генераторы, а измерительные устройства содержат различные сенсоры и средства вычислительной техники, предназначенные для первичной обработки полученной информации. Выходными переменными системы являются декартовы координаты схвата y1,y2,y3 , изменение которых происходит в результате поворотов звеньев на углы j . Задачи системы - перемещение робота в заданную точку, движение по предписанной траектории и т.д.
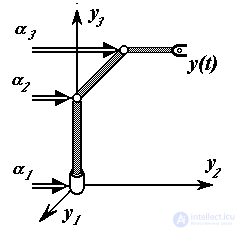
Рис. 1.14. Многозвенный манипулятор
На рис. 1.15 представлена схема системы управления движением руки - естественный аналог рассмотренной выше технической системы управления положением РМ.
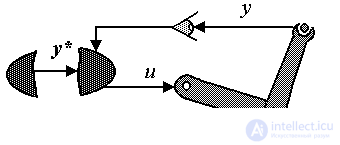
Рис. 1.15. Система управления движением руки.
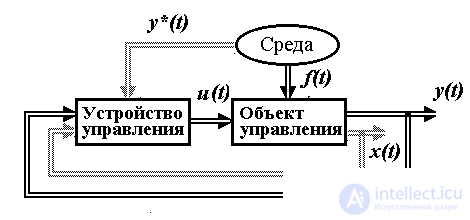
Рис. 1.16
Система управления может быть представлена в виде двух основных блоков, взаимодействующих с внешней средой (рис. 1.16). Объект управления (ОУ) - это комплекс элементов системы, наиболее тесно связанных с физической природой управляемого процесса, т.е. собственно объект, измерительные и исполнительные устройства. Эта часть САУ обычно проектируется и комплектуется как единое целое и является ее наиболее жесткой частью. Динамические свойства ОУ (математическая модель) находятся с использованием известных физических законов.
Устройство управления (УУ) - блок, выполняющий вычислительные функции, слабо связанные с физической природой ОУ. Алгоритм его работы зависит от динамических свойств управляемого процесса и задач, решаемых системой управления. Аппаратно современные УУ представляют собой универсальные или специализированные средства вычислительной техники. Их программное обеспечение составляют универсальные системные средства и специальные прикладные программы, осуществляющие расчет управляющих воздействий u. Эти устройства легко приспосабливаются к конкретному ОУ и задаче управления, что определяет гибкость и универсальность УУ.
Прочтение данной статьи про структура сау позволяет сделать вывод о значимости данной информации для обеспечения качества и оптимальности процессов. Надеюсь, что теперь ты понял что такое структура сау, компоненты сау, система автоматического управления и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Математические основы теории автоматического управления
Комментарии
Оставить комментарий
Математические основы теории автоматического управления
Термины: Математические основы теории автоматического управления