Лекция
Привет, сегодня поговорим про технология использования компьютерных моделей, обещаю рассказать все что знаю. Для того чтобы лучше понимать что такое технология использования компьютерных моделей , настоятельно рекомендую прочитать все из категории Моделирование и Моделирование систем.
Как мы уже отмечали в лекции 01 «Понятие моделирования. Способы представления моделей», модели строятся для решения определенных задач, поэтому здесь мы рассмотрим типы таких задач и то, как в них используются модели, которые мы уже научились строить.
Итак, модель — закономерность, преобразующая входные значения в выходные: Y = M(X). Под этим можно понимать таблицу, график, выражение из формул, закон (уравнение) и т. д. Это вопрос способа записи закономерности. В нашем курсе и далее в курсе «Модели и методы искусственного интеллекта» мы подробно покажем, как переходить от одного типа записи к другому.
Под Y в системотехнике понимают некоторый интересующий исследователя или владельца системы показатель. Каждая система существует или создается, чтобы реализовать определенную цель. Нет систем без целей. Вот цель-то и является выходным, последним параметром в цепи преобразований от входа к выходу, который может нас интересовать, так как ради него, собственно, и проделываются все преобразования. Те переменные, которые как-то не связаны по цепям с выходным показателем, не относятся к рассматриваемой системе и должны быть отброшены.
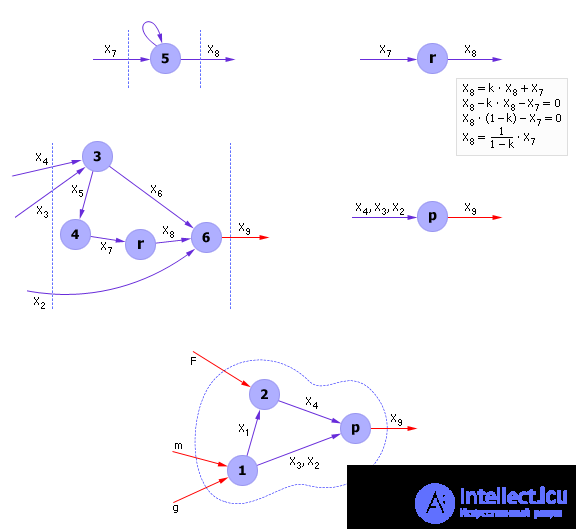
Представим нашу систему как граф. Это возможно, так как система есть элементы и связи между ними, что соответствует вершинам и дугам графа. Дальнейшее изложение материала будем вести на примере графа, изображенного на рис. 20.1.
|
|
| Рис. 20.1. Представление системы в виде графа |
Элементы системы описываются законами, то есть уравнениями (переменные, операции между ними и знаки уравнивания) или системами уравнений в общем случае, что соответствует вершинам графа. Если уравнений в вершине несколько, то эту вершину всегда, при желании, снова можно будет разбить на подграф, где каждой вершине уже будет соответствовать только одно уравнение. Связи графа указывают на связи элементов системы между собой, то есть связь соответствует общей для двух вершин переменной. Итак, каждая вершина ассоциируется с формулой (например, присвоением выражения или уравнением), связывающим переменную вершины с остальными переменными, доступными ей по ее связям.
Если граф достаточно подробный, таков, что каждой вершине соответствует только одно уравнение, то можно ассоциировать вершины с переменными. Одна вершина — одна переменная. Преобразованный таким образом граф мы уже видели в лекции 11. Переход от одной формы представления графа к другой возможен всегда.
Обратите внимание: часть связей находится внутри графа — это внутренние связи системы. Часть связей графа связывает переменные системы X с внешними переменными, которые не являются частью системы, а являются частью среды. Эти связи пересекают границы графа, границы системы.
Для моделирования очень важно определить, где проходит эта граница, что будет подлежать моделированию, а что нет. Что будет описано причинно-следственными связями, а что нет и так и останется бесконечно большим и непознанным. Еще раз обратимся к тексту лекции 01: «…«Модель — поиск конечного в бесконечном» — эта мысль принадлежит Д. И. Менделееву. Что отбрасывается, чтобы превратить бесконечное в конечное? В модель включаются только существенные аспекты, представляющие объект, и отбрасываются все остальные (бесконечное большинство)…»
Итак, граница отделяет конечное (система) от бесконечного (среда). Граница эта может проходить в нескольких разных местах. Это говорит о том, что модель может граничить с несколькими областями, не имеющими описания, которые задаются по отношению к системе только как воздействующие на нее сигналы, как данные, но не как законы (см. рис. 1.12). Бесконечность может оказаться и внутри системы, тогда такая система называется открытой (см. лекцию 11 «Построение модели динамической системы в виде дифференциальных уравнений и расчет ее методом Эйлера»).
Заметьте, граф является сильно связанным образованием, количество связей в таком графе больше чем количество вершин. В сложных системах связей намного больше, чем вершин. Для нормального графа каждая его вершина должна иметь связь с любой другой вершиной графа через цепочку связей. Если в составе графа вы обнаружили несвязанные между собой куски, то модель системы некорректна или вы имеете дело с двумя или несколькими независимыми системами. Если граф большой, то имеет смысл разрезать его на небольшие подграфы и изучать их по отдельности (см.рис. 20.2). Логично разрезать граф по таким линиям, чтобы при этом разрывалось как можно меньше связей, и получалось как можно больше отдельных кусков (подграфов). Заметим, что этими действиями мы, фактически, привели граф к иерархической форме. Иерархия — это способ борьбы со сложностью изучаемой системы. В этом случае между линиями разреза оставляют одну вершину, структуру которой расшифровывают отдельно.
|
|
| Рис. 20.2. Разбиение графа (системы) на подграфы (подсистемы) |
Применение этого приема очень эффективно, если в графе встречаются несколько одинаковых подграфов. В этом случае они изучаются отдельно и один только раз, а результат используется многократно и обобщается на все остальные случаи. Далее в курсе «Модели и методы искусственного интеллекта» мы отметим этот прием как основной в мышлении человека, которое только и занимается тем, что строит в голове модели объектов окружающего мира, свертывает сложные конструкции в новые понятия, ежеминутно решает задачи на иерархических моделях и борется, таким образом, со сложностью окружающего мира.
Итак, граф задает своей структурой модель системы, которая выражена как система взаимосвязанных уравнений (см. рис. 20.3).
|
|
| Рис. 20.3. Иллюстрация соответствия вершин графа описанию подсистем большой системы |
Или в самом общем виде пишут:

Если среди внешних переменных определить цель и определить управление (за счет чего достигается цель), то часть внешних переменных будет называться выходными переменными (цель), а другая — входными переменными. Если определен вход (управление) и выход (цель) на графе, то связи графа становятся направленными, от входа к выходу (см. рис. 20.4). Эти связи выражают причинно-следственные отношения — изменения на входе ведут к изменению значений на выходе.
|
|
| Рис. 20.4. Представление системы в виде ориентированного графа, граф соответствует определенной задаче, решаемой на системе |
В этом виде граф соответствует задаче, решаемой на графе. Задача упорядочивает порядок вычислений.
Если теперь применить последовательно уравнения системы от назначенного пользователем входа к выходу, то с математической точки зрения образуется цепочка выражений (см. рис. 20.5). Искомые переменные будут выражены в итоге по цепочке через входные переменные (см. рис. 20.6). Система уравнений подстановкой свертывается в формулу.
|
|
| Рис. 20.5. Явное решение задачи «Управление выходом X9 системы через вход (m, g, F)» путем подстановки |
|
|
| Рис. 20.6. Процедура последовательной детализации графа (операция композиции и декомпозиции) |
В общем виде это выглядит так: Y = М(М … (М(X)) … ). Такая математическая структура называется композицией и задает цепочку (последовательность) вычислений, а значит алгоритм вычисления ответа задачи, что в свою очередь определяет решение системы. Решение может быть как численным, так и аналитическим. Если задача будет другой, то модель всей системы развернется в другую цепочку, от других входных переменных к другому выходу. Композиция, соответствующая задаче, изменится, но модель всей системы останется неизменной.
Конечно, не всегда цепочка может выразить явно зависимость выхода от входа, еще чаще это происходит, когда выражают вход через выход (вход как функция выхода). Выражая искомое через известное, требуется применение обратных к каждой из примененных в модели операции. Например, кx1 = sin(x2) применимо обратное преобразование x2 = arcsin(x1), к x1 = x22 требуется применить обратную операцию x2 = sqrt(x1) и так далее. А это не всегда возможно. Это зависит от того, насколько развита алгебра (правила преобразований) данного вида выражений. Если алгебра не может определить некоторые обратные преобразования к ряду выражений, операций или функций, то тогда модель остается неявной, и приходится применять специальные методы расчета неявных уравнений. Решения в этом случае получают численными методами.
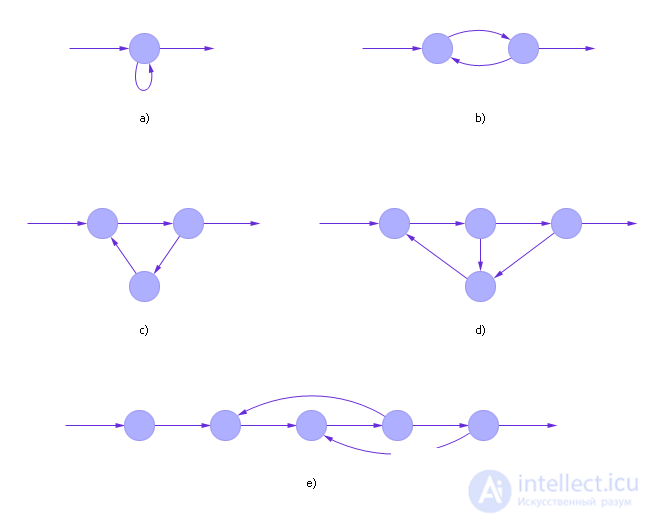
К таким осложнениям приходят также модели, содержащие петли в графе (см. рис. 20.7).
|
|
| Рис. 20.7. Примеры графов различной сложности, содержащих петли |
Итак, если определен вход и выход и на модели определена задача, граф становится ориентированным. Задача определяет композицию модели, способ вычисления ответа. Если общая формула системы решается, то формула явная, и алгоритм ее реализации на цифровых машинах будет линейным, если аналитического решения нет, то формула неявная, и алгоритм будет циклическим.
Теперь настало время уточнить понятие входных переменных, поскольку их много и список их весьма неоднороден. Надо иметь в виду, что входные переменные, которые ранее мы обозначали какX, могут быть обозначены в целях детализации как Xi, Ui, Pi, Qi.
Во-первых, X может быть не одной переменной, а целым вектором переменных {X1, X2, …, Xn}, так как сложные системы, которые мы моделируем, обычно связаны со средой множеством факторов{X1, X2, …, Xn}. Их значения обычно мало интересны или недоступны напрямую для изменения владельцем системы, но они существуют. Иногда это часть внутренних переменных системы, переменные состояния, фазовые переменные, память системы и так далее.
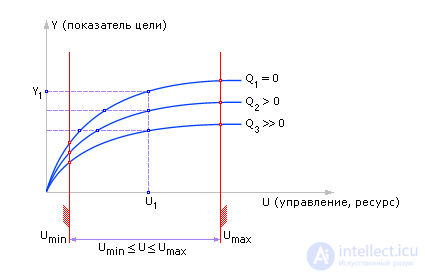
Во-вторых, логически удобно разделить вектор X на входные переменные (собственно X) ипеременные управления U. Тогда под X обычно понимают не зависящие от воли владельца системы факторы, а под U — факторы, которыми владелец системы может непосредственно распоряжаться по собственной воле. Такие факторы принято называть управляемыми переменными или простоуправлением. Заметим, что обычно значения переменных U чем-то ограничены. В самом деле, нельзя ведь открыть водопроводный кран больше чем на 1 (кран открыт полностью) или меньше чем на 0 (кран полностью закрыт). Поэтому если понимать под U степень открытия крана, то 0 ≤ U ≤ 1. В других случаях пишут более общий вариант Umin ≤ U ≤ Umax. В этом смысле здесь и далее мы будем считать, что управление, поскольку оно ограничено, это некоторый ресурс.
В-третьих, P — мало меняющиеся переменные, которые в этом случае называют параметрами системы; по своей сути, конечно, они мало отличаются от X. В прикладных задачах их часто выносят отдельно, так как динамически они (на отрезке времени рассмотрения или существования задачи) не меняются и не меняют свойств системы.
В-четвертых, помехи Q. Это переменные, которые действуют на систему помимо воли ее владельца и ухудшают значение желаемого показателя Y. Помехи всегда действуют во вред владельцу системы, занижая желаемые показатели системы. Управление U — фактор, который призван компенсировать негативное действие помех Q на выходной показатель цели Y. То есть при одном и том же значении U, при действии помех, в отличие от случая их отсутствия, показатель Y будет ниже. Ликвидировать вообще все действующие на объект помехи часто не удается по трем перечисленным ниже причинам.
Поэтому часто борются не с самими помехами, а с отклонениями переменных X и Y от идеальных плановых их значений, борются с последствиями аварий, а не с их причинами.
Отойдем на минуту от серьезного разговора и поясним важную мысль на шуточном примере. «Чтобы корова давала больше молока и меньше ела, ее надо больше доить и меньше кормить». Автор этой фразы — известный шоумен Николай Фоменко («Русское радио»). Пример демонстрирует достаточно распространенную ошибку, когда инженер путает и считает что X = –U (чтобы убрать помеху, надо подать компенсирующий сигнал такой же величины и на туже переменную), чего практически в сложных системах не бывает. Задача управления в этой шутке решается чересчур тривиально или, точнее сказать, просто неверно поставлена, она попросту отсутствует. Причина этого заключается в отсутствии модели M. Здесь просто не описана корова как система, как сено превращается в молоко. Не учтено, что управление (сено) не может быть использовано (доставлено на выход) в качестве цели (молока).
Итак, посредством управления U удается часто снизить негативное действие помех на целевой показатель Y. Действие управления на помеху есть, но оно неявное, точнее сказать и помеха Q, и управление U действуют на показатель Y, при этом управление выбирается таким, чтобы свести на нет негативное действие помех на Y.
И, конечно, следует помнить, что усилия по компенсации помех всегда чего-то стоят владельцу системы, так как используют тот самый ресурс, который мы обозначили ранее как Umax. Итак, заметьте: с управлением всегда связано понятие ресурса. Управление черпает свои силы в ресурсе. Если ресурс мал, то управление связано и не может справиться с сильной помехой.
Если ресурс мгновенно возобновляем, то Umin ≤ U ≤ Umax. Если ресурс обладает свойством аддитивности, накапливается и тратится, не может мгновенно возобновиться, то

где Uир(t) — темп использования ресурса, Uпр(t) — темп поставки ресурса.
Как известно из математики и было уже рассмотрено в лекции 01, с выражением Y = M(X) можно решить три вида задач, которые приведены в табл. 20.1.
| Таблица 20.1. Формы записи модели и типы решаемых задач |
||||||||||||||||
|
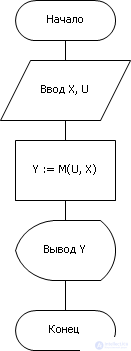
Изучается влияние некоторого входного параметра U на конечный результат или показатель Y. 1, 2, …, N — эксперименты, проводимые с моделью. Если подавать неоднократно различные значения Uна модель M (алгоритм показан на рис. 20.10), то, измеряя Y, в результате моделирования на выходе модели можно построить зависимость Y = M(U), см. рис. 20.8. Обычно реально ограничиваются некоторым набором входных воздействий Umin ≤ U ≤ Umax, проходя значения U точку за точкой с определенным шагом ΔU. При этом, во время такого эксперимента часть входных параметров Xзамораживают, оставляя их значения неизменными. При необходимости можно повторить эксперимент по перебору U из интервала Umin ≤ U ≤ Umax при другом значении X. В этом случае получается семейство кривых Y = M(U, X), см. рис. 20.9.
|
|
| Рис. 20.8. Примерный вид зависимости цели Y от управления U, полученный экспериментально на модели системы |
|
|
| Рис. 20.9. Примерный вид зависимости цели Y от управления U при различных значениях действующих помех Q |
|
|
| Рис. 20.10. Алгоритм, применяемый при решении прямой задачи исследования модели (анализ) |
То есть, испытывая неоднократно модель при различных входных сигналах, мы можем получить зависимость выхода от входа. Такая задача называется прямой (см. лекцию 01). Результатом задачи является кривая, семейство кривых, таблица, а когда это возможно, то формула, закон и т. д. Основной вопрос анализа — познание свойств объекта. «Воздействуем на объект и смотрим, что получится, как он реагирует, делаем вывод о его свойствах, возможностях».
Важно! Важными понятиями в системотехники являются «управляемость» и «наблюдаемость». По виду кривых Y = M(U) (рис. 20.9) можно определить, для всех ли значений Y возможно некоторое значение входного сигнала (U, X)? Любое ли значение Y можно достигнуть, используя переменные(U, X) из выбранного диапазона. То есть характер кривых указывает, в какой области Y объект является управляемым. Понятие «управляемость» касается выходной переменной.
Наблюдаемость — возможность измерения, анализа той или иной характеристики объекта. Иногда из-за того, что некоторая величина не может быть непосредственно измерена в результате эксперимента, приходится, чтобы получить о ней хоть какое-то представление, довольствоваться косвенными показателями. Понятие «наблюдаемость» касается выходной переменной. Проектировать системы надо так, чтобы качество наблюдаемости и управляемости были обеспечены.
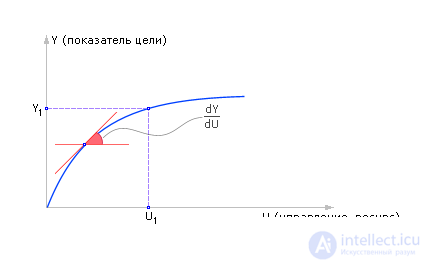
Отношение изменения Y к изменению U (при фиксированном X) называется чувствительностью Yпо U. Обычно, так как кривая Y = M(U) для сложных систем нелинейна, то изменение U принимают небольшой величиной, в идеале ΔU –> 0. В математическом смысле, чувствительность — это производная dY/dU. Понятие чувствительности касается отношения выхода ко входу (рис. 20.8).
Чтобы сократить количество испытаний, входные воздействия выбирают по определенному правилу. Естественно желание получить необходимый объем информации о системе при минимальном количестве испытаний. Такую систему испытаний планируют факторным экспериментом.
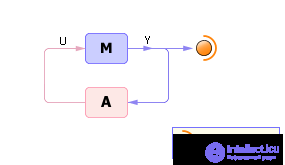
Цель задачи синтеза — нахождение экстремума функции результата. Когда анализ закончен и построены функции, графики, таблицы, когда объект (его свойства и поведение) исследован во всех вариантах возможных входных воздействий, имеет смысл найти среди всего этого многообразия откликов наилучший. Обычно выход — цель функционирования системы, и логично принять, что цель должна принимать лучшие из всех возможных значений, потому имеет смысл найти такие значения входных параметров U, при которых выходной показатель Y примет свое наилучшее значение (экстремум). При этом под экстремумом может подразумеваться как минимум, так и максимум зависимости Y(U). Чтобы найти экстремум, модель включают в контур (см. рис. 20.11) с некоторым алгоритмом A, осуществляющим автоматическое управление входом U и построенным так, что в результате его работы производится поиск такого входного воздействия U на модель M, при котором она выдает наилучший выходной результат.
|
|
| Рис. 20.11. Схема решения обратных задач (синтез) |
Существуют различные алгоритмы поиска оптимума функции Y = M(U). Упомянем три из них (подробно эти и другие методы вы будете изучать в дисциплине «Системный анализ и исследование операций»).
|
|
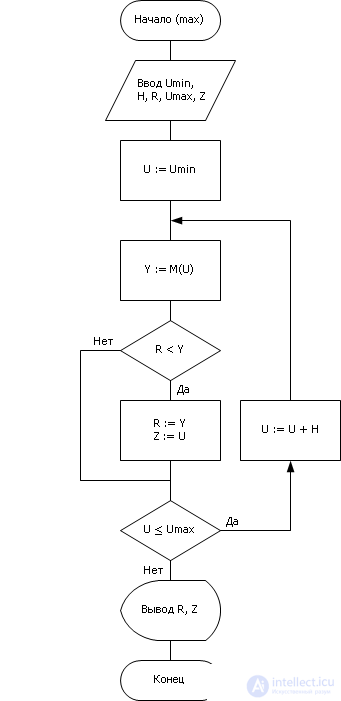
| Рис. 20.12. Алгоритм перебора, примененный к решению задачи синтеза — поиск наилучшего U для максимизации Y |
|
|
| Рис. 20.13. Характерный рисунок поиска экстремума функции Y = M(U) методом перебора |
|
|
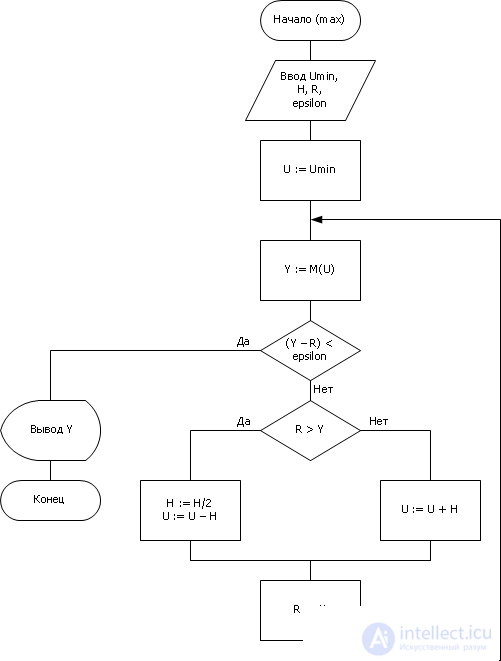
| Рис. 20.14. Алгоритм деления шага пополам, примененный к решению задачи синтеза — поиск наилучшего U для максимизации Y |
|
|
| Рис. 20.15. Характерный рисунок поиска экстремума функции Y = M(U) методом деления шага пополам |
|
|
| Рис. 20.16. Алгоритм поиска экстремума методом градиента, примененный к решению задачи синтеза |
|
|
| Рис. 20.17. Характерный рисунок поиска экстремума функции Y = M(U) методом градиента |
Задачу настройки модели мы уже подробно обсуждали в лекциях 02—08 (см. лекцию 02), и останавливаться на ней мы уже не будем. Это способы построения собственно самой модели.
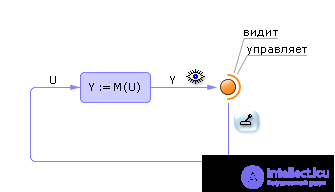
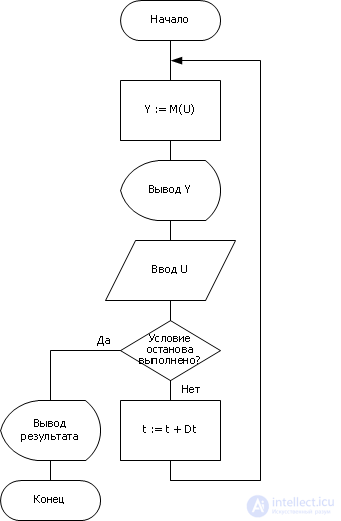
Этот класс задач, использующих модели, применяют для выработки навыков обучения у управляющего персонала. К тренажерам близки компьютерные игры. Управление моделью в данном случае осуществляет человек-оператор, который наблюдает за выходом модели (см. рис. 20.18). Воздействуя на вход модели, оператор старается добиться нужного выходного результата, и в процессе этих действий получает необходимые навыки по управлению, которые затем может перенести на реальный объект. На рис. 20.19 показан примерный вид алгоритма реализации тренажера на базе модели.
|
|
| Рис. 20.18. Схема использования модели в тренажерах |
|
|
| Рис. 20.19. Типичный вид алгоритма реализации тренажера |
Разумеется, тренажер должен обладать качествами наблюдаемости и управляемость. То есть оператор в принципе может и должен судить о качестве своих действий, только наблюдая какие-то важные для себя результаты на выходе. И модель должна быть построена таким образом, чтобы можно было достичь хотя бы в принципе искомых результатов какими-то входными воздействиями на нее (управляемость).
Параллельно с моделью может функционировать система оценки деятельности оператора, а также блок автоматического определения наилучших решений, которые могут в определенных режимах (например, режим обучения или подсказки) помогать оператору (см. рис. 20.20). Для этого к модели следует подключить экспертную систему, дающую рекомендации оператору в затруднительных для него случаях.
|
|
| Рис. 20.20. Схема построения тренажера с функциями экспертной системы |
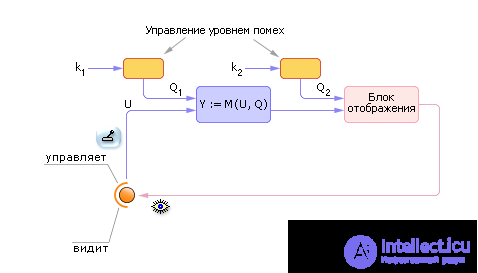
Для выработки устойчивых навыков у персонала в процессе тренажа в информацию вносят дополнительные помехи, имитирующие реальные сложности, возникающие на объекте. Можно вносить помехи на входе (нарушается управляемость), на выходе (нарушается наблюдаемость) или в переменные состояния модели (см. рис. 20.21). Следует различать равнодушно действующие помехи и целенаправленное противодействие. В первом случае речь идет о случайном процессе, мешающем оператору достичь цель. Случайная помеха может, как увеличить свое значение, так и равновероятно уменьшить его, то есть чаще всего среднее значение помехи на большом интервале времени равно нулю. Во втором случае речь идет о целенаправленной дезинформации оператора (среднее ее действия не равно нулю).
Для тренажа играет большую роль среднее значение и дисперсия величины помех, которые постепенно наращивают с ростом опыта оператора.
|
|
| Рис. 20.21. Схема тренажера, дополненного генератором помех |
Теперь обсудим вопросы снятия и использования системных характеристик, то есть таких характеристик, которые представляют свойства системы в целом. Напомним, важнейшими понятиями для системы являются управление, помехи, цель. Системная характеристика должна связать эти понятия вместе. Методика снятия характеристик такова.
Выделяем переменные U (вход, управление) и Y (выход, цель) для исследования.
Закрепляем остальные X в виде некоторого фиксированного значения. Для каждого U из диапазона допустимых значений Umin ≤ U ≤ Umax наблюдаем и фиксируем в табл. 20.2 результат Y.
| Таблица 20.2. Зависимость результата от управления при отсутствии действия помехи. Точки зависимости сняты как результат работы имитационной модели |
||||||||||||||||||
|
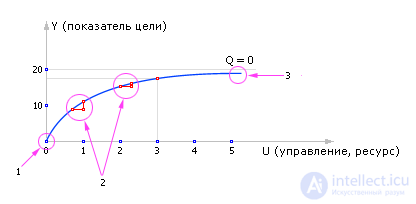
На графике (см. рис. 20.22) строим точку с координатами (U, Y). В результате ряда экспериментов получается кривая Y(U), которая показывает зависимость выхода от входа, цели от управления.
Обычно, если мы имеем дело моделью, отражающей сложную систему достаточно реально, с большой степенью адекватности, зависимость Y(U) должна иметь примерно такую зависимость, как показано на рис. 20.22.
|
|
| Рис. 20.22. Примерный вид зависимости показателя цели от управления (ресурса), характерный для сложных систем |
ВНИМАНИЕ! Здесь приведены наиболее общие рассуждения, вид кривой может быть весьма различным!!!! На рис. 20.22 четко видны следующие закономерности.
Выделите на объекте переменную помеха Q. По смыслу эта переменная должна мешать достигать цель и не зависеть от воли владельца, управлять ею он не может.
Далее следует сменить значение Q (ранее мы считали, что оно равно 0) и провести все описанные выше действия снова (см. табл. 20.3).
| Таблица 20.3. Зависимость результата от управления при повышенном уровне действия помехи. Точки зависимости сняты как результат работы имитационной модели |
||||||||||||||||||
|
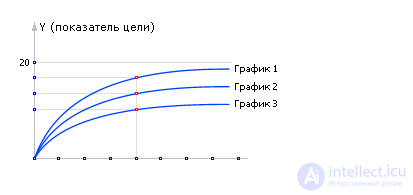
И снова построить по таблице экспериментов график (см. рис. 20.23). Очевидно, что при действии возмущений Q график 2 пройдет ниже, чем график 1, поскольку наличие помехи означает, что для достижения того же эффекта Y следует приложить больше управляющих усилий U. Заметим, что менять Q во время изменения U не следует, чтобы четко видеть связь Y именно от U.
|
|
| Рис. 20.23. Примерный вид зависимости показателя цели от управления (ресурса) и возмущения, характерный для сложных систем |
Важно!!! Если помеха все-таки во время снятия кривой Y(U) меняется самопроизвольно, а это бывает в том случае, когда помеха носит случайный характер, то следует для нанесения одной точки на график сначала провести несколько экспериментов при одном и том же U, а потом усреднить результат Y. Средняя величина более достоверна, чем одна из случайных реализаций. Сколько надо провести экспериментов для усреднения, чтобы обеспечить заданную точность ответа, мы обсудим с вами позднее в лекции 21 и лекции 34.
Снова увеличьте Q и снова проведите эксперименты, и снова получите новую таблицу (см. табл. 20.4) и новый график (см. рис. 20.23) — Y(U). В результате вы получите семейство кривых 1-2-3, отражающих зависимость цели, как от управления, так и от помехи.
| Таблица 20.4. Зависимость результата от управления при высоком уровне действия помехи. Точки зависимости сняты как результат работы имитационной модели |
||||||||||||||||||
|
Снятие экспериментальных данных закончено. Теперь в любой момент при заданных Q и Y, используя графики 1, 2, 3, вы можете предсказать результат — необходимый для достижения цели Yуровень управления U. Такая задача, напомним, называется обратной.
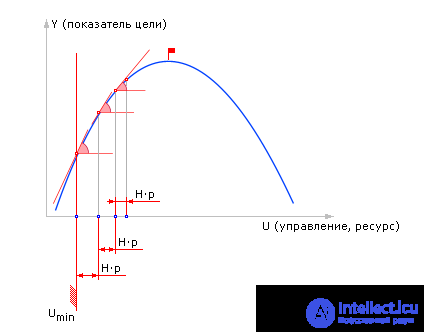
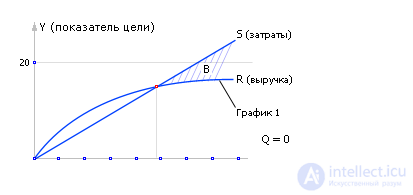
Теперь, используя снятые зависимости, полезно найти наилучшие решения среди множества возможных. Для этого на каждом графике 1, 2, 3 дополнительно построим линию затрат S (spending), так как управление всегда чего-то стоит, и чем больше вы используете этот ресурс, тем больше приходится за это платить. Наклон этой линии указывает на цену ресурса (см. рис. 20.24).
|
|
| Рис. 20.24. Совмещенные графики выручки от реализации цели (выручка) и затрат на ее достижение |
Примем для примера, что цена на ресурс неизменна и не зависит от того, сколько вы его используете (хотя, заметим, что бывают оптовые скидки).
Допустим, мы должны максимизировать цель Y. Тогда кривая R (receipts), выраженная в стоимостных единицах, символизирует выручку, а линия S (spending), выраженная в тех же стоимостных единицах символизирует затраты. Если вычесть из выручки затраты, то есть вычесть по точкам один график из другого (R – S), то получим в итоге прибыль P (profit): P = R – S. А именно, то, как прибыль зависит от управления (см. рис. 20.25).
|
|
| Рис. 20.25. Суммарный график прибыли, полученной (выручка минус затраты) в зависимости от величины управления (ресурса) U. Наилучшее решение — максимум прибыли — точка Е1, наилучшее управление — U1 |
Очевидно, что зона B (bankrupt) — зона банкротства, точка N (null) — точка «ничего не делай и нечего не имей» и точка E1 (extremum) — зона наибольшей прибыли. Получить прибыли больше, чемY1 при этом уровне, помех Q не удастся. Эта точка символизирует тот простой факт, что результат, достигнутый любой ценой, не окупает чрезмерных усилий по его достижению, «все хорошо в меру». Любые управляющие воздействия, даже большие, чем U1, дают худший результат.
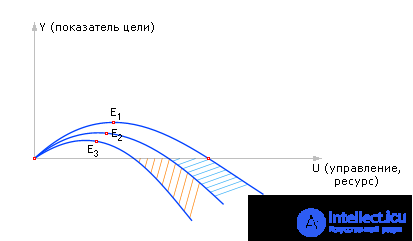
Аналогично найдем точку E на остальных графиках 2, 3 — E2, E3.
|
|
| Рис. 20.26. Графики прибыли, в зависимости от величины управления (ресурса) U и возмущения Q. Точки наилучших решений Еi — максимум прибыли. Соответствующие им наилучшие управления — Ui |
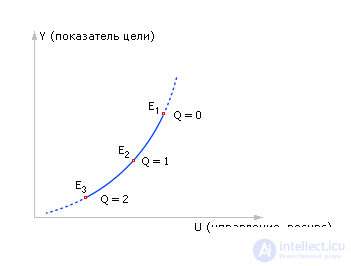
Сведем все точки E со всех трех графиков на один новый график (см. рис. 20.27).
|
|
| Рис. 20.27. Итоговый график наилучших решений E по критерию прибыли Y в зависимости от величины управления (ресурса) U и возмущений Q |
Мы получили замечательную зависимость «кривая оптимальных значений цели Y в зависимости от наилучших решений U при заданном уровне помех Q», по которой можно узнать оптимальные прилагаемые управляющие усилия, необходимые для того, чтобы достичь наилучшего в этих условиях результата. Назовем эту кривую «взаимозависимость цели, управления и помех».
На графике видно, что наибольшая достижимая возможная прибыль уменьшается от точки к точке с увеличением величины помехи — точка E смещается. Например, возможен случай, если помехи очень сильны, а ресурс имеет фиксированную цену, то, возможно, что лучше ничего не делать.
Учтя вышесказанное и возвращаясь к лекции 01 (рис. 1.9—1.10), еще раз обратим внимание, что построение и использование моделей в составе программных продуктов — перспективное новое направление в проектировании программного обеспечения. Изучение оптимальных вариантов действий по управлению предприятием должно быть обеспечено инструментами моделирования.
Надеюсь, эта статья об увлекательном мире технология использования компьютерных моделей, была вам интересна и не так сложна для восприятия как могло показаться. Желаю вам бесконечной удачи в ваших начинаниях, будьте свободными от ограничений восприятия и позвольте себе делать больше активности в изученном направлени . Надеюсь, что теперь ты понял что такое технология использования компьютерных моделей и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Моделирование и Моделирование систем
Ответы на вопросы для самопроверки пишите в комментариях, мы проверим, или же задавайте свой вопрос по данной теме.










Комментарии
Оставить комментарий
Моделирование и Моделирование систем
Термины: Моделирование и Моделирование систем