Лекция
Привет, Вы узнаете о том , что такое системы позиционирования, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое системы позиционирования, позиционирование на основе визуальных маркеров, инерциальная навигация, магнитное позиционирование, местоположение на основе известных визуальных особенностях, система позиционирования в помещении, беспроводные технологии позиционирования, визуальная одометрия , настоятельно рекомендую прочитать все из категории Робототехника.
Система внутреннего позиционирования (англ. Indoor positioning system, IPS) — локальная система нахождения местоположения внутри зданий и закрытых сооружений, где практически недоступна спутниковая система навигации.
Навигация (лат. navigatio, от лат. navigo — «плыву на судне»):
В течение многих веков термин навигация означал совокупность указанных значений. В XX веке, с развитием науки и техники, появлением воздушных судов, космических кораблей — новых объектов навигации, появились новые смысловые значения термина. Теперь, в общем смысле, навигация — процесс управления некоторым объектом (имеющим собственные методы передвижения) в определенном пространстве передвижения. Состоит из двух основных частей:
Геолокация (англ. geolocation) — определение реального географического местоположения электронного устройства, например радиопередатчика, сотового телефона или компьютера, подключенного к Интернету. Словом «геолокация» может называться как процесс определения местоположения такого объекта, так и само местоположение, установленное таким способом. Часто для целей геолокации используется та или иная система позиционирования, и часто бывает важнее определить местоположение в виде, легко воспринимаемом человеком (например, почтовый адрес), нежели точные географические координаты.
Слово геолокация (англ. geolocation) также может обозначать просто географические координаты (широту и долготу) того или иного места на Земле (такое определение термина приведено в стандарте ISO/IEC 19762-5:2008).
Термин «геолокация» применим также по отношению к отслеживанию миграции животных (англ.)русск. и мониторингу окружающей среды с помощью устройств, закрепленных на телах животных, в том числе имплантированных идентификационных транспондеров и регистраторов данных.
Здания и сооружения вызывают сложности с позиционированием объектом в силу следующий причин:
С другой стороны, позиционирование и навигация внутри помещений может быть упрощена благодаря:
Система позиционирования в помещении( IPS ) представляет собой сеть устройств , используемых для поиска людей или объектов , где GPS и другие спутниковые технологии не хватает точности или не полностью, например, внутри многоэтажных зданий, аэропортов, аллей, парковок и подземных местах.
Для определения местоположения внутри помещений используется большое количество разнообразных методов и устройств, начиная от уже развернутых реконфигурированных устройств, таких как смартфоны, антенны Wi-Fi и Bluetooth , цифровые камеры и часы; для специально построенных установок с реле и маяками, стратегически размещенными в определенном пространстве. В сетях IPS используются свет, радиоволны, магнитные поля, акустические сигналы и поведенческая аналитика. IPS может достигать точности позиционирования 2 см, что на уровне приемников GNSS с поддержкой RTK, которые могут достигать точности 2 см вне помещений. IPS использует различные технологии, в том числе измерение расстояния до ближайших узлов привязки (узлы с известными фиксированными позициями, например, точки доступа WiFi / LiFi , маяки Bluetooth или сверхширокополосные маяки), магнитное позиционирование , точный расчет . Они либо активно определяют местонахождение мобильных устройств и тегов, либо обеспечивают определение местоположения или окружающей среды для устройств. Локализованный характер IPS привел к фрагментации конструкции, когда в системах используются различные оптические , радио или даже акустические технологии.
IPS имеет широкое применение в коммерческой, военной, розничной и товарной отраслях. На рынке существует несколько коммерческих систем, но нет стандартов для системы IPS. Вместо этого каждая установка адаптирована к пространственным размерам, строительным материалам, требованиям точности и бюджетным ограничениям.
Для сглаживания для компенсации стохастических (непредсказуемых) ошибок должен существовать надежный метод значительного уменьшения бюджета ошибок. Система может включать информацию из других систем, чтобы справиться с физической неоднозначностью и обеспечить компенсацию ошибок. Обнаружение ориентации устройства (часто называемое направлением компаса , чтобы отличить его от вертикальной ориентации смартфона) может быть достигнуто либо путем обнаружения ориентиров внутри изображений, сделанных в режиме реального времени, либо с помощью трилатерации с маяками. Также существуют технологии для обнаружения магнитометрической информации внутри зданий или мест со стальными конструкциями или в шахтах по добыче железной руды.
Для позиционирования внутри помещений можно применять следующие технологии, различающиеся по физическому принципу и достигаемой точности измерений:
Из-за ослабления сигнала, вызванного строительными материалами, спутниковая система глобального позиционирования (GPS) теряет значительную мощность в помещении, что влияет на необходимое покрытие приемников как минимум четырьмя спутниками. Кроме того, многократные отражения от поверхностей вызывают многолучевое распространение, приводящее к неконтролируемым ошибкам. Эти же самые эффекты ухудшают все известные решения для определения местоположения внутри помещений, в которых используются электромагнитные волны от внутренних передатчиков к внутренним приемникам. Для решения этих проблем применяется комплекс физических и математических методов. Перспективное направление коррекции ошибок радиочастотного позиционирования открыто за счет использования альтернативных источников навигационной информации, таких как инерциальный измерительный блок.(IMU), монокулярная камера. Одновременная локализация и картографирование (SLAM) и WiFi SLAM. Интеграция данных из различных навигационных систем с разными физическими принципами может повысить точность и надежность всего решения.
США Глобальная система позиционирования (GPS) и другие подобные глобальные навигационные спутниковые системы (GNSS) , как правило , не подходят для создания закрытых помещениях, так как микроволны будут ослаблены и рассеяны по крышам, стен и других предметов. Однако для того, чтобы сигналы позиционирования стали повсеместными, может быть выполнена интеграция между GPS и позиционированием в помещении.
В настоящее время приемники GNSS становятся все более и более чувствительными из-за увеличения вычислительной мощности микрочипов. Приемники GNSS с высокой чувствительностью могут принимать спутниковые сигналы в большинстве помещений, и попытки определить трехмерное положение в помещении оказались успешными. [26] Помимо увеличения чувствительности приемников, используется технология A-GPS , при которой альманах и другая информация передаются через мобильный телефон.
Однако, несмотря на то, что надлежащее покрытие для четырех спутников, необходимых для обнаружения приемника, не достигается при всех текущих проектах (2008–11 гг.) Для работы внутри помещений, эмуляция GPS была успешно развернута в метро Стокгольма. [27] Решения по расширению покрытия GPS смогли обеспечить зональное позиционирование в помещении, доступное со стандартными наборами микросхем GPS, такими как те, что используются в смартфонах. [27]
Хотя большинство современных IPS способны определять местоположение объекта, они настолько грубые, что их нельзя использовать для определения ориентации или направления объекта.
Одним из методов достижения достаточной эксплуатационной пригодности является « отслеживание ». Образует ли определенная последовательность местоположений траекторию от первого до самого фактического местоположения. Статистические методы затем служат для сглаживания местоположений, определенных на треке, с учетом физических возможностей объекта двигаться. Это сглаживание необходимо применять, когда цель перемещается, а также для постоянной цели, чтобы компенсировать ошибочные меры. В противном случае единичное место жительства или даже следуемая траектория составили бы странствующую последовательность прыжков.
В большинстве приложений совокупность целей больше, чем одна. Следовательно, система IPS должна служить для надлежащей идентификации каждой наблюдаемой цели и должна быть способна разделять и отделять цели индивидуально в группе. Об этом говорит сайт https://intellect.icu . IPS должна иметь возможность идентифицировать отслеживаемые объекты, несмотря на "неинтересных" соседей. В зависимости от конструкции, либо сенсорная сеть должна знать, от какой метки она получила информацию, либо локационное устройство должно иметь возможность напрямую идентифицировать цели.
Для определения местоположения можно использовать любую беспроводную технологию. Многие различные системы используют преимущества существующей беспроводной инфраструктуры для определения местоположения внутри помещений. Существует три основных варианта топологии системы для конфигурации оборудования и программного обеспечения: сетевая, терминальная и терминальная. Точность позиционирования можно повысить за счет оборудования и установок беспроводной инфраструктуры.
Система позиционирования Wi-Fi (WPS) используется там, где GPS неадекватен. Методика локализации, используемая для определения местоположения с помощью точек беспроводного доступа, основана на измерении интенсивности принятого сигнала ( сила принятого сигнала в английском языке RSS) и методе «fingerprinting». Чтобы повысить точность методов снятия отпечатков пальцев, могут применяться методы статистической постобработки (например, теория гауссовского процесса ) для преобразования дискретного набора «отпечатков пальцев» в непрерывное распределение RSSI каждая точка доступа по всей локации. Типичные параметры, полезные для геолокации точки доступа Wi-Fiили точка беспроводного доступа включают SSID и MAC-адрес точки доступа. Точность зависит от количества позиций, внесенных в базу данных. Возможные колебания сигнала, которые могут возникнуть, могут увеличить количество ошибок и неточностей на пути пользователя.
Изначально Bluetooth заботился о близости, а не о точном местоположении. Bluetooth не был предназначен для определения местоположения с привязкой, как GPS, однако он известен как решение для геозон или микроизгородей, что делает его решением для приближения в помещении, а не решением для позиционирования внутри помещения.
Micromapping и крытый отображение было связано с Bluetooth и к Bluetooth LE на основе IBeacon способствовало Apple Inc. . Реализована и применяется на практике масштабная система позиционирования внутри помещений на базе iBeacons.
Положение динамика Bluetooth и домашние сети могут использоваться для широкого ознакомления.
Простая концепция индексации местоположения и отчетов о присутствии для помеченных объектов, использует только известную идентификацию датчика. [11] Это обычно относится к системам пассивной радиочастотной идентификации (RFID) / NFC , которые не сообщают об уровне сигнала и различных расстояниях отдельных тегов или большого количества тегов и не обновляют какие-либо ранее известные координаты местоположения датчик или текущее местоположение каких-либо тегов. Работоспособность таких подходов требует некоторого узкого прохода для предотвращения выхода за пределы диапазона.
Вместо измерения на большом расстоянии может быть организована плотная сеть приемников малого радиуса действия, например, в виде сетки для экономии во всем наблюдаемом пространстве. Из-за малого радиуса действия помеченный объект будет идентифицирован только несколькими близкими сетевыми приемниками. Идентифицированный тег должен находиться в пределах досягаемости идентифицирующего считывателя, что позволяет приблизительно определить местоположение тега. Усовершенствованные системы сочетают в себе визуальное покрытие с сеткой камеры с покрытием беспроводной сети для труднодоступных мест.
Большинство систем используют непрерывные физические измерения (например, только угол и расстояние или расстояние) вместе с данными идентификации в одном комбинированном сигнале. Досягаемость этих датчиков обычно охватывает весь этаж, проход или отдельную комнату. Решения с малым радиусом действия применяются с несколькими датчиками и перекрывающимся радиусом действия.
Угол прихода (AoA) - это угол, под которым сигнал достигает приемника. AoA обычно определяется путем измерения разницы во времени прихода (TDOA) между несколькими антеннами в матрице датчиков. В других приемниках он определяется набором высоконаправленных датчиков - угол может быть определен по тому, какой датчик принял сигнал. AoA обычно используется с триангуляцией и известной базовой линией для определения местоположения относительно двух якорных передатчиков.
Время прибытия (ToA, а также время полета) - это время, необходимое сигналу для распространения от передатчика к приемнику. Поскольку скорость распространения сигнала постоянна и известна (без учета различий в средах), время прохождения сигнала можно использовать для непосредственного расчета расстояния. Множественные измерения можно комбинировать с трилатерацией и мультилатерацией, чтобы найти местоположение. Этот метод используется в системах GPS и сверхширокополосной связи. Системы, использующие ToA, обычно требуют сложного механизма синхронизации для поддержания надежного источника времени для датчиков (хотя этого можно избежать в тщательно спроектированных системах, используя повторители для установления связи [12] ).
Точность методов на основе TOA часто страдает от условий сильного многолучевого распространения при локализации внутри помещения, что вызвано отражением и дифракцией радиочастотного сигнала от объектов (например, внутренних стен, дверей или мебели) в окружающей среде. Однако можно уменьшить эффект многолучевого распространения, применяя методы, основанные на временной или пространственной разреженности.
Индикация уровня принимаемого сигнала (RSSI) - это измерение уровня мощности, принимаемого датчиком. Поскольку радиоволны распространяются по закону обратных квадратов , расстояние можно приблизительно определить (обычно с точностью до 1,5 метра в идеальных условиях и от 2 до 4 метров в стандартных условиях ) на основе соотношения между уровнем передаваемого и принимаемого сигнала (передача сила - постоянная величина, зависящая от используемого оборудования), пока никакие другие ошибки не приводят к ошибочным результатам. Внутри построек несвободное пространство, поэтому на точность существенно влияют отражение и поглощение от стен. Нестационарные объекты, такие как двери, мебель и люди, могут представлять еще большую проблему, поскольку они могут влиять на мощность сигнала динамическим и непредсказуемым образом.
Многие системы используют расширенную инфраструктуру Wi-Fi для предоставления информации о местоположении. Ни одна из этих систем не предназначена для правильной работы с какой-либо инфраструктурой как есть. К сожалению, измерения уровня сигнала Wi-Fi очень зашумлены , поэтому в настоящее время проводятся исследования, направленные на создание более точных систем с использованием статистики для фильтрации неточных входных данных. системы позиционирования Wi-Fi иногда используются на открытом воздухе в качестве дополнения к GPS на мобильных устройствах, где лишь несколько беспорядочных отражений мешают результатам.
Нерадиотехнологии можно использовать для определения местоположения без использования существующей беспроводной инфраструктуры. Это может обеспечить повышенную точность за счет дорогостоящего оборудования и установок.
Магнитное позиционирование может предложить пешеходам со смартфонами точность в 1–2 метра в помещении с уровнем достоверности 90% без использования дополнительной беспроводной инфраструктуры для определения местоположения. Магнитное позиционирование основано на железе внутри зданий, которое создает локальные вариации магнитного поля Земли. Неоптимизированные чипы компаса внутри смартфонов могут обнаруживать и записывать эти магнитные вариации для нанесения на карту мест внутри помещений.
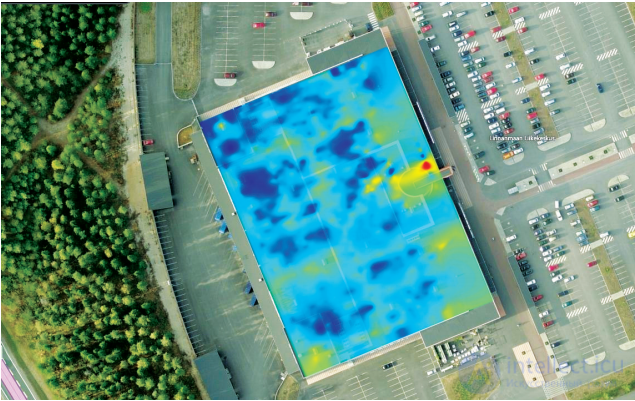
Среди тех, кто знаком с магнитным позиционированием, есть относительно распространенное мнение, что
искажения, вызванные такими строительными материалами, как сталь и бетон, снизят точность.
Однако верно обратное; IndoorAtlas утверждает, что именно это искажение магнитного поля
позволяет позиционировать людей в помещении.
Сравнение технологий: WiFi, BLE и Магнитное позиционирования
| Технология | Точность | инфраструктура | Настройка / Затраты на обслуживание | Электропитание | Разработка Среда |
| Магнитное Позиционирование |
6 футов | API / minima | Краудсорс | нет | iOS/Android |
| WiFi | 20-300 футов | Hardware/ Software | Переназначить - Снятие отпечатков пальцев |
Электричество/ Аккумулятор |
iOS/Android |
| BLE | 6 -100 футов | Hardware/ Software | Устройство Управление |
Электричество/ Аккумулятор |
iOS/Android |
|
Счисление координат (или счисление места) Расчет мертвых пешеходов (PDR) (pedestrian dead reckoning) |
Software/Cloud | Краудсорс | нет | iOS/Android | |
| Other (cameras, LED, sound) | переменная | Hardware/ Software | Устройство Управление |
iOS/Android |
Расчет мертвых пешеходов и другие подходы к определению местоположения пешеходов предлагают инерциальную единицу измерения, переносимую пешеходом либо путем косвенного измерения шагов (подсчет шагов), либо с помощью подхода, устанавливаемого на ноге, иногда ссылаясь на карты или другие дополнительные датчики для ограничения естественного дрейф датчика, возникающий при инерциальной навигации. Инерционные датчики MEMS страдают от внутренних шумов, которые со временем приводят к кубическому увеличению погрешности положения. Чтобы уменьшить рост ошибок в таких устройствах, часто используется подход, основанный на фильтрации Калмана . Однако для того, чтобы сделать его способным строить карту, структура алгоритма SLAM[54] будет использоваться.
Инерционные меры обычно охватывают дифференциалы движения, поэтому местоположение определяется путем интегрирования и, следовательно, для получения результатов требуются константы интегрирования. Фактическая оценка местоположения может быть найдена как максимум двумерного распределения вероятностей, которое пересчитывается на каждом этапе с учетом модели шума всех задействованных датчиков и ограничений, создаваемых стенами и мебелью. Основываясь на движениях и поведении пользователей при ходьбе, IPS может оценивать местоположение пользователей с помощью алгоритмов машинного обучения.
Инерциальная навигация — метод навигации (определения координат и параметров движения различных объектов — судов, самолетов, ракет и др.) и управления их движением, основанный на свойствах инерции тел, являющийся автономным, то есть не требующим наличия внешних ориентиров или поступающих извне сигналов. Неавтономные методы решения задач навигации основываются на использовании внешних ориентиров или сигналов (например, звезд, маяков, радиосигналов и т. п.). Эти методы в принципе достаточно просты, но в ряде случаев не могут быть реализованы из-за отсутствия видимости или наличия помех для радиосигналов и т. п. Необходимость создания автономных навигационных систем явилась причиной возникновения инерциальной навигации.
Сущность инерциальной навигации состоит в определении ускорения объекта и его угловых скоростей с помощью установленных на движущемся объекте приборов и устройств, а по этим данным — местоположения (координат) этого объекта, его курса, скорости, пройденного пути и др., а также в определении параметров, необходимых для стабилизации объекта и автоматического управления его движением. Это осуществляется с помощью :
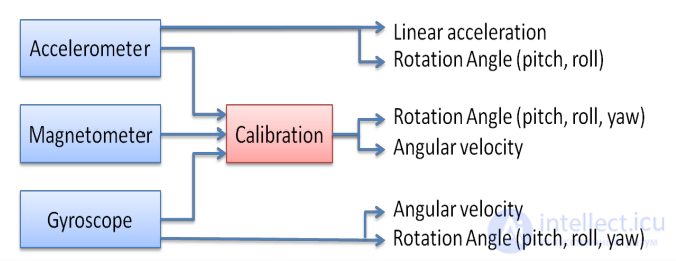
Преимущества методов инерциальной навигации состоят в автономности, помехозащищенности и возможности полной автоматизации всех процессов навигации. Благодаря этому методы инерциальной навигации получают все более широкое применение при решении проблем навигации надводных, подводных и воздушных судов, космических судов и аппаратов и других движущихся объектов.
Инерциальная навигация также используется в военных целях: в крылатых ракетах и БПЛА, в случае радиоэлектронного противодействия противника. Как только система навигации крылатой ракеты или БПЛА обнаруживает воздействие средств РЭБ противника, блокировку или искажение сигнала GPS, она запоминает последние координаты и переключается на инерциальную систему навигации[
Система визуального позиционирования может определять местоположение мобильного устройства с камерой путем декодирования координат местоположения по визуальным маркерам. В такой системе маркеры размещаются в определенных местах по всему объекту, каждый маркер кодирует координаты этого места: широту, долготу и высоту от пола. Измерение угла обзора от устройства до маркера позволяет устройству оценить свои собственные координаты местоположения относительно маркера. Координаты включают широту, долготу, высоту и высоту от пола.
ArUco-маркеры — это популярная технология для позиционирования робототехнических систем с использованием компьютерного зрения.
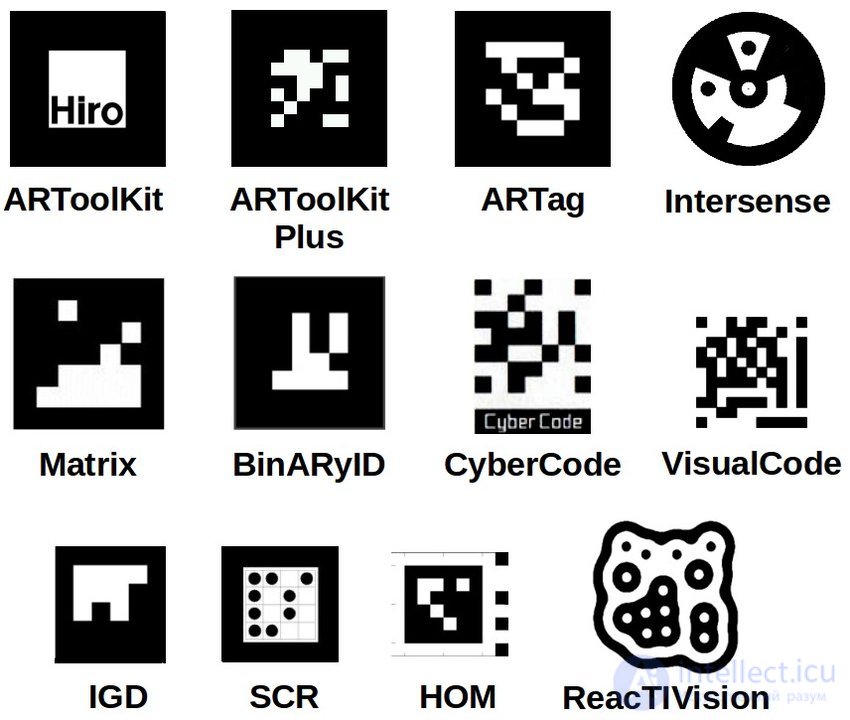
разные виды маркеров
Набор последовательных снимков с камеры устройства может создать базу данных изображений, которая подходит для оценки местоположения на месте проведения. После создания базы данных мобильное устройство, перемещающееся по объекту, может делать снимки, которые можно интерполировать в базу данных объекта, получая координаты местоположения. Эти координаты могут использоваться в сочетании с другими методами определения местоположения для повышения точности. Обратите внимание, что это может быть частный случай объединения датчиков, когда камера играет роль еще одного датчика.
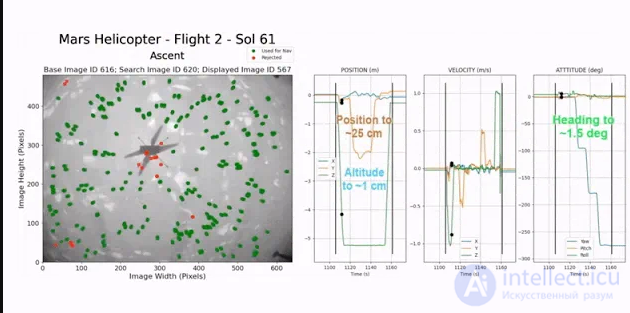
Трекинг по точкам. используемый вертолетом Ingenuity
После сбора данных датчика IPS пытается определить место, из которого, скорее всего, была получена полученная передача. Данные от одного датчика, как правило, неоднозначны и должны быть разрешены с помощью ряда статистических процедур для объединения нескольких входных потоков датчиков.
Один из способов определения местоположения - сопоставление данных из неизвестного местоположения с большим набором известных местоположений с использованием такого алгоритма, как k-ближайший сосед . Этот метод требует всестороннего обследования на месте и будет неточным при любых значительных изменениях в окружающей среде (из-за движущихся людей или движущихся объектов).
Местоположение будет рассчитано математически путем аппроксимации распространения сигнала и определения углов и / или расстояния. Затем обратная тригонометрия будет использоваться для определения местоположения:
Продвинутые системы сочетают в себе более точные физические модели со статистическими процедурами:
Системы внутреннего позиционирования находят применение в большом числе приложений:
Основным потребительским преимуществом позиционирования внутри помещений является распространение мобильных вычислений с учетом местоположения внутри помещений. Поскольку мобильные устройства становятся повсеместными, контекстная осведомленность о приложениях становится приоритетом для разработчиков. Однако большинство приложений в настоящее время полагаются на GPS и плохо работают в помещении. Применение внутри помещений включает:
и т. д.
Визуальная одометрия — метод оценки положения и ориентации робота или иного устройства с помощью анализа последовательности изображений, снятых установленной на нем камерой (или камерами).

Методы визуальной одометрии используются, например в компьютерных оптических мышах. Также используются в квадрокоптерах и на марсоходах Mars Exploration Rover.
В робототехнике и компьютерном зрении визуальная одометрия — это процесс определения положения и ориентации робота путем анализа связанных изображений камеры. Он использовался в широком спектре роботизированных приложений, например, на марсоходах Mars Exploration Rover.
В навигации одометрия обычно связана с использованием данных о движении приводов (к примеру от датчиков вращения) для оценки изменения положения в пространстве. Этот метод имеет свои минусы, из-за проскальзывания и неточностях при движении по неровным поверхностям, а также неприменим в роботах с нестандартными методами передвижения, к примеру в шагающих.
Визуальная одометрия подходит для точной навигации использующих любой тип передвижения на твердой поверхности.
Большинство существующих подходов к визуальной одометрии основаны на следующих этапах.
Методика прямой визуальной одометрии выполняет вышеуказанные операции непосредственно в датчике.
Визиодометрия оценивает плоские вращательные перемещения между изображениями с использованием фазовой корреляции вместо извлечения признаков.
Данная статья про системы позиционирования подтверждают значимость применения современных методик для изучения данных проблем. Надеюсь, что теперь ты понял что такое системы позиционирования, позиционирование на основе визуальных маркеров, инерциальная навигация, магнитное позиционирование, местоположение на основе известных визуальных особенностях, система позиционирования в помещении, беспроводные технологии позиционирования, визуальная одометрия и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника

Комментарии