Лекция
Привет, сегодня поговорим про сенсорика роботов сис чувствительных датчиков , обещаю рассказать все что знаю. Для того чтобы лучше понимать что такое сенсорика роботов сис чувствительных датчиков , настоятельно рекомендую прочитать все из категории Робототехника.
Сенсорика роботов (система чувствительных датчиков) обычно копирует функции органов чувств человека: зрение, слух, обоняние, осязание и вкус. Чувство равновесия и положения тела в пространстве, как функция внутреннего уха, иногда считаются шестым чувством. Функционирование биологических органов чувств базируется на принципе нейронной активности, в то время как чувствительные органы роботов имеют электрическую природу. Возможны возражения, что на самом деле обе эти группы имеют электрическую природу, основанные на указании, что нейронные и электрические цепи имеют общее электрохимическое происхождение. Тем не менее, нейронная сенсорика функционирует иначе, чем просто электрическая. По этой причине для устранения разночтений мы определим сенсорику робота, как имеющую электрическую природу.
Для полной имитации биологических органов чувств необходимо использование нейронных чувствительных устройств (сенсоров). Примером такого нейронного сенсора является человеческое ухо, работу которого мы рассмотрим. Характеристика человеческого уха нелинейна. Его реакция на звуковой раздражитель носит логарифмический характер. Это означает, что десятикратное повышение уровня звукового сигнала вызывает двукратное повышение субъективного уровня громкости. Для сравнения, обычный приемник звуковых сигналов, например микрофон, имеет линейную выходную характеристику. Отсюда десятикратное повышение уровня выходного сигнала, подаваемого на компьютер, микроконтроллер или иную схему, соответствует десятикратному увеличению звукового сигнала.
Сенсорные датчики могут обнаружить какие-то внешние сигналы и определить их величину, что выражается в появлении на выходе пропорционального электрического сигнала. Информация, содержащаяся в сигнале, должна быть считана и обработана «интеллектом» робота (например, ЦПУ) или нейронной сетью. Мы можем характеризовать искусственные сенсоры по их отношению к природным органам чувств, но обычно классы сенсорных устройств выделяются по типу воздействия, на которое данный сенсор реагирует: свет, звук, тепло и т. д. Типы сенсоров, встроенных в робота, определяются целями и местом его применения.
Обработка сигналов
При выборе типа сенсорного устройства, используемого в роботе, необходимо решить вопрос чтения и обработки сигнала, поступающего от него. Vjui Многие сенсоры представляют собой датчики резистивного типа, что означает, что их сопротивление меняется в зависимости от количества поступающей энергии. Если такой датчик является частью делителя напряжения, то амплитуда выходного сигнала окажется пропорциональной количеству поступающей энергии.
Если для робота необходимо действительное значение интенсивности поступающей энергии, необходимо использовать аналого-цифровой преобразователь (АЦП). АЦП измеряет входной электрический сигнал и выдает соответствующий ему двоичный код.
Для правильной работы и преобразования данных АЦП необходим микроконтроллер или цифровая схема. Во многих случаях использование АЦП не является необходимым. В некоторых случаях достаточно использовать компаратор.
Как следует из самого названия, компаратор сравнивает два электрических напряжения. Одно из напряжений называется опорным и устанавливается по нашему желанию. Другое напряжение выдается сенсорным датчиком (через делитель напряжения). Выход компаратора имеет два уровня – высокий и низкий. Высокий уровень соответствует +5 В, низкий уровень – 0 В.
Выходной сигнал компаратора зависит от соотношения уровней напряжений на его двух входах. Возможны три состояния: напряжение датчика меньше опорного напряжения, равно ему или превосходит его.
Пример построения компаратора
Лучшим способом познакомиться с работой компаратора является использование его в схеме. Посмотрев на рис. 5.1, вы сразу обнаружите, что компаратор выглядит почти так же, как операционный усилитель. Это действительно так; компараторы представляют собой специализированные операционные усилители (ОУ). Компаратор, использованный в первом примере, представляет собой счетверенный компаратор типа LM339. Эта интегральная схема состоит из четырех компараторов и заключена в корпус с 14 выводами. Аналогично ОУ компараторы имеют инвертированный и неинвертированный входы. В данном случае опорное напряжение подается на инвертированный вход (-).
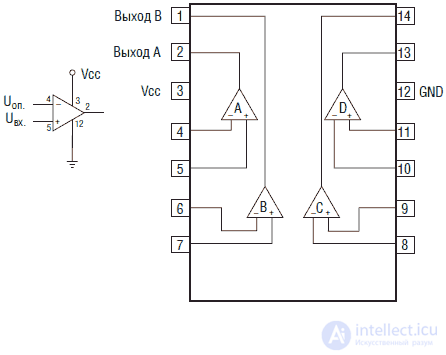
Рис 5.1. Схема компаратора и счетверенный компаратор на ИС LM 339
Делитель напряжения
Делитель напряжения представляет собой простой, но очень важный элемент схемы. Его использование позволяет состыковать большинство резистивных сенсорных датчиков с входом компаратора. Опорное напряжение получается также с помощью делителя напряжения на двух резисторах 10 кОм (см. рис. 5.2А). Voп. в данном случае будет равно 2,5 В, т. е. половине питающего напряжения 5 В (см. табл. 5.1). Понятно, что величина Voп. может быть любой в пределах от нуля до напряжения питания и зависит от отношения сопротивлений делителя напряжения.
Vоп.=Vпит.хR2/(R1+R2)
где Vпит.=5 В.
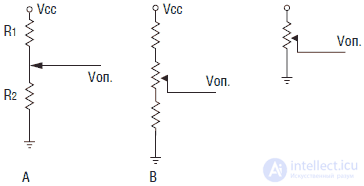
Рис. 5.2. Делители напряжения А, В и С
Таблица 5.1. Двухрезисторный делитель напряжения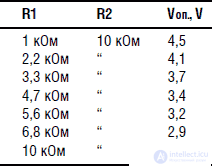
Для создания переменного делителя напряжения можно использовать переменный резистор, как показано на рис. 5.2В и 5.2С. Я предпочитаю схему 5.2А как самую простую.
Схема для проверки работы устройства приведена на рис. 5.3 Вместо сенсорного датчика мы будем использовать два постоянных резистора в 1 кОм и переменный резистор 5 кОм. Переменным резистором можно регулировать величину напряжения, поступающего на неинвертированный вход. Выход компаратора обычно представляет собой NPN транзистор с открытым коллектором, выходной ток которого более чем достаточен для подключения светодиода, который мы будем использовать в качестве индикатора. Говоря иначе, выход компаратора может быть использован как электронный ключ, замыкаемый на землю. Это окажется полезным позднее при коммутации таймера типа 555.
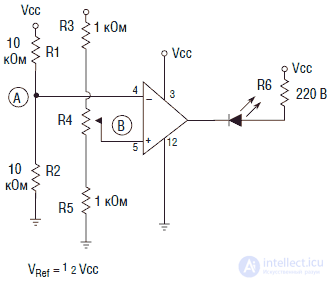
Рис. 5.3. Схема проверки работы компаратора
После сборки схемы посмотрим, что будет происходить. Когда входное напряжение меньше опорного Vоп., на выходе компаратора будет присутствовать низкий уровень 0 В, через светодиод будет протекать ток, что вызовет его свечение. Если мы с помощью переменного резистора повысим напряжение Vвх. до уровня, превышающего Voп. уровень выхода перебросится в положение «высокий», и светодиод погаснет. Можно проверить работу компаратора вольтметром, измеряя значения напряжений на инвертированном и неинвертированном входах.
Многие, и я в том числе, находят работу подобной схемы несколько неестественной. Более привычным является зажигание светодиода при превышении Vвх. над Voп. Это можно легко сделать, поменяв местами подключения входов компаратора, т. е. присоединив Vвх. к инвертированному входу компаратора, а Voп. к неинвертированному соответственно. Функция выхода изменится при этом на противоположную.
Если по схеме не требуется большого количества компараторов, то в качестве компаратора можно использовать КМОП операционный усилитель, включенный соответствующим образом. Я предпочитаю использовать подобные ОУ, поскольку они обеспечивают достаточный выходной ток для питания светодиодов и других частей схемы (см. рис. 5.4).
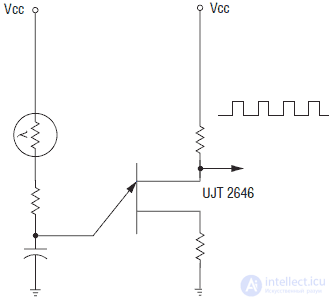
Рис. 5.4. Схема проверки работы компаратора на ОУ
Датчики освещенности (фотосенсоры)
Существует большое количество различных типов датчиков освещенности: фоторезисторы, фотоэлектрические устройства, фотодиоды и фототранзисторы. Световые датчики могут использоваться для определения положения и направления движения. Некоторые роботы используют источники ИК излучения и ИК приемники для обхода препятствий и предотвращения ударов о стены. Источник и приемник ИК излучения монтируются в передней части робота и имеют одинаковое направление. При приближении робота к препятствию или стене, ИК излучение отражается от их поверхности и детектируется ИК приемником. ЦПУ робота интерпретирует такое увеличение сигнала как препятствие и обводит робота вокруг него.
Перед датчиком освещенности могут быть установлены фильтры, выделяющие световые волны определенной длины и поглощающие прочие. Примером таких фильтров могут служить фильтры, установленные на роботах-пожарных и детектирующие наличие открытого пламени. Подбором фильтра можно выделить свет, излучаемый пламенем, и ослабить световые лучи, приходящие от других источников.
Другим примером является использование эмульсионных цветовых фильтров для различения цвета. Можно представить себе робота, собирающего или выбирающего только спелые фрукты на основании цвета их кожуры.
Фоторезисторы
Фоторезисторы на основе сульфида кадмия (см. рис. 5.5) являются устройствами, реагирующими на видимый свет. Спектр поглощения такого резистора близок к спектру человеческого глаза (см. рис. 5.6). CdS – фоторезистор представляет собой полупроводник, но без обычного PN перехода. Наибольшее сопротивление такой фоторезистор имеет в полной темноте. По мере увеличения освещенности его сопротивление уменьшается. Измеряя сопротивление резистора, можно оценить среднюю освещенность в видимом спектре.

Рис. 5.5. Фотоэлементы на основе сульфида кадмия (CdS)
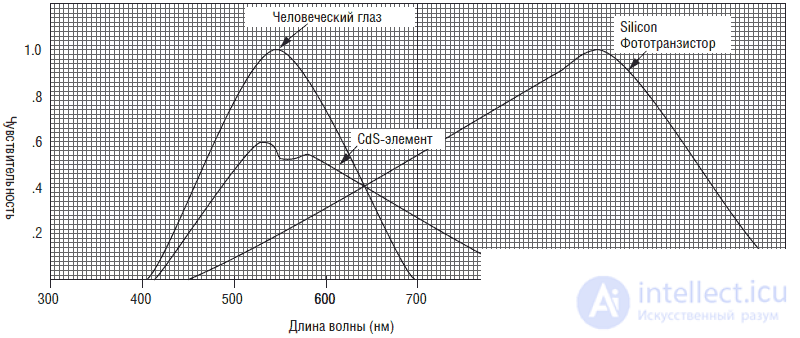
Рис. 5.6. Диаграмма, показывающая сравнительную спектральную чувствительность глаза и светочувствительных датчиков
На рис. 5.7 приведена основная схема устройства. Поскольку CdS-преобразователь представляет собой резистор, он может быть включен напрямую в делитель напряжения. По мере нарастания освещенности сопротивление фоторезистора падает. Соответственно, повышается напряжение на резисторе R1 и на выводе 2 ИС. Когда напряжение превысит напряжение на выводе 3, включится двигатель M. Порог срабатывания регулируется подстроечным резистором R1 4,7 кОм. Такая схема является основной для управления «солнечным шаром», описанным в гл. 12.
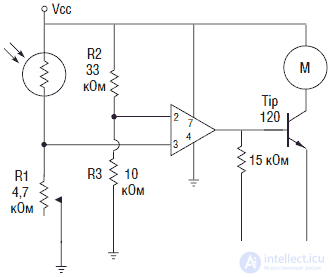
Рис. 5.7. Выключатель света на фоторезисторе
На рис. 5.8 изображена схема светочувствительного нейрона. По мере нарастания освещенности возрастает частота выходных импульсов. Такая схема фотонейрона может генерировать тактовые импульсы для контроллера шагового двигателя типа ИС UCN5804. При увеличении интенсивности освещенности поворот шагового двигателя осуществляется быстрее.
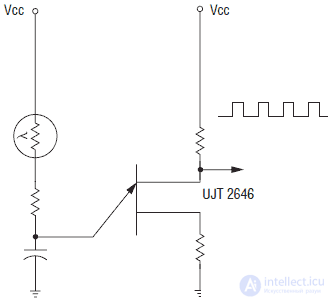
Рис. 5.8. Нейрон на базе фоторезистора
Фотоэлектрические устройства
Фотоэлектрические (солнечные) элементы, фотодиоды и фототранзисторы имеют похожую конструкцию. Все они обладают светочувствительным PN переходом. В солнечных батареях площадь PN перехода велика и используется для вырабатывания электрической энергии пропорционально степени освещенности.
Фотодиоды обычно используются в схемах в обратном включении. Световой поток уменьшает запирающий барьер PN перехода, и через диод начинает течь ток. Время срабатывания фотодиодов намного меньше, чем CdS фоторезисторов, поэтому они могут быть использованы для детектирования модулированных световых сигналов.
Фототранзисторы представляют собой светочувствительные транзисторы. Их преимущество в сравнении со светодиодами в том, что они способны усиливать поступающий световой сигнал.
Датчики ИК излучения
Датчики ИК излучения работают в диапазоне низких частот излучения световых волн (900 нм и ниже). Они заслуживают специального рассмотрения, поскольку широко используются в роботах для ориентирования, обхода препятствий и связи.
Использование ИК датчиков не представляет никаких трудностей. У различных дистрибьюторов можно найти модули, содержащие детектор модуляции (см. рис. 5.9). Их преимущество в том, что они детектируют ИК сигнал, модулированный строго определенной несущей частотой (обычно около 40 кГц).

Рис. 5.9. ИК приемный модуль
Несущая частота 40 кГц может быть промодулирована в свою очередь другим низкочастотным сигналом. Приемный модуль также изготовлен таким образом, что он «принимает» сигналы только на частоте несущей 40 кГц. Такой способ позволяет создать очень надежный канал связи. Сперва приемный модуль обнаруживает несущую 40 кГц и только после этого «отпирает» устройство для приема сигнала модуляции передатчика ИК излучения, отфильтровывая, таким образом, сигналы других источников. После этого осуществляется детектирование модулированного сигнала с несущей 40 кГц.
ИК детектор препятствийНа рис. 5.10 изображен простой детектор препятствий. Как только устройство приближается к препятствию, поток отраженного ИК излучения возрастает. Соответственно, возрастает напряжение на приемнике ИК излучения, что в какой-то момент перебрасывает компаратор и выдает сигнал, информирующий о наличии препятствия по ходу движения.

Рис. 5.10. Изображение ИК детектора препятствий
На рис. 5.11 изображена схема ИК передатчика. Передатчик использует ИС таймер типа 555 в режиме генерации. Переменный резистор R1 регулирует частоту выходных импульсов. Выход таймера соединен с NPN транзистором типа 2N2222, в эмиттерную цепь которого включен ИК светодиод. Обратите внимание, что при работе схемы диод светиться не будет, т. к. ИК излучение невидимо для человеческого глаза. Поскольку мы конструируем простой детектор препятствий, модуляция несущей 40 кГц не требуется.

Рис. 5.11. Схема ИК передатчика
На рис 5.12 изображена схема приемника ИК излучения. Приемный модуль представляет собой устройство Everlite IRM-8420, имеющее центральную частоту 37,9 кГц и ширину полосы пропускания 3 кГц (±1,5 кГц). Выход модуля представляет собой выход низкого уровня. Это означает, что при обнаружении сигнала выход «садится» на землю. Такой выход эквивалентен выходу на транзисторе NPN структуры с открытым коллектором (см. вставку на рис. 5.12). Ток выхода достаточен для зажигания светодиода. В тестовой схеме наличие сигнала вызовет зажигание светодиода.
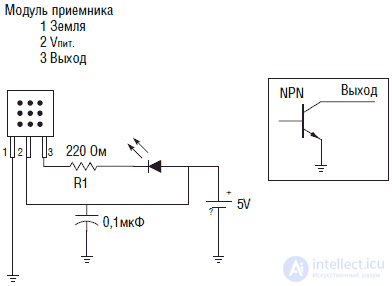
Рис. 5.12. Схема ИК приемника
Расположите передатчик и приемник ИК излучения один возле другого в одном и том же направлении. Для того чтобы ИК светодиод передатчика излучал свет в строго определенном направлении, его необходимо заключить в светонепроницаемую трубку. Если не сделать этого, то настройка может оказаться невозможной. Помните о том, что некоторые пластмассы, непроницаемые для видимого света, могут оказаться прозрачными для лучей ИК диапазона.
Разместите квадратный кусочек белого картона (со стороной порядка 8 см) перед приемником и передатчиком. Регулируйте величину сопротивления R1 до зажигания светодиода. Затем удалите картонку – светодиод должен погаснуть. Если этого не происходит, возможно, боковое ИК излучение улавливается приемником.
После того как устройство заработало, необходимо более тщательно подобрать сопротивление R1 для обнаружения объектов на большем расстоянии. Передвигайте картонку по направлению к устройству до момента зажигания светодиода. Немного подрегулируйте R1 до полного зажигания светодиода. Обратите внимание: для правильной работы робота обнаружение препятствий на слишком большом расстоянии может оказаться нежелательным.
ИК системы связи и ДУ с использованием DTMF
ИК передатчики используются многими авторами для создания систем связи и дистанционного управления (ДУ). Об этом говорит сайт https://intellect.icu . Как правило, ИК передатчик модулируется определенными частотами, а ИК приемник использует ИС типа 567, снабженную системой ФАПЧ. Для обеспечения нормальной работы необходимы настройка и согласование каждой пары «приемник-передатчик». Ниже приведены примеры построения подобных систем.
Разработан ряд специализированных широко доступных интегральных схем для применения в сфере телекоммуникаций. Подобные недорогие ИС способны передавать и принимать до 16 различных сигналов без предварительной настройки. Путем соединения подобных ИС со стандартными ИК излучателями и приемниками возможно создание ИК систем связи и дистанционного управления.
Коды DTMF
Сигналы DTMF (dual-tone multifrequency [двухтоновый многочастотный сигнал]) были предложены более 25 лет назад. Это произошло как раз перед тем, как правительство США форсировало расформирование компании Bell Telephone для разделения ее по различным секторам рынка. DTMF обычно известен как способ тонального набора.
Стандартный сигнал DTMF состоит из двух тонов звуковых частот, выбранных из группы восьми различных звуковых сигналов. Эти сигналы восьми различных частот поделены на две группы: группа сигналов низкого тона и группа сигналов высокого тона (см. табл. 5.2). Сигнал DTMF представляет собой комбинацию сигналов звуковых тонов, выбранных из различных групп (см. рис. 5.13-5.15). Простейший подсчет показывает, что возможны 4 х 4 = 16 возможных комбинаций.

Рис. 5.13. Форма колебаний низкого тона
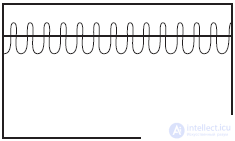
Рис. 5.14. Форма колебаний высокого тона
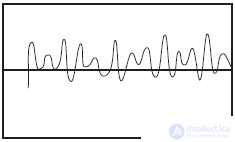
Рис. 5.15. Алгебраическая сумма колебаний высокого и низкого тонов (DTMF)
Сигналы низкого тона (от R1 до R4) относятся к группе рядов. Сигналы высокого тона (от С1 до С4) образуют группу колонок.
Таблица 5.2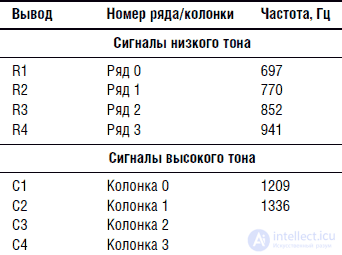
Любая комбинация частот может быть получена при использовании матрицы выключателей 4 х 4 или соответствующей клавиатуры (рис. 5.16). Помните, что эта технология была заимствована из телефонной индустрии, поэтому она была рассчитана на эффективное применение в телефонных линиях достаточно посредственного качества.
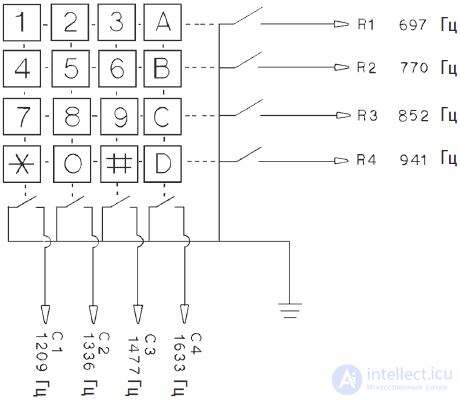
Рис. 5.16. Матрица клавиатуры 4х4, показывающая отдельные частоты DTMF
Стандартные телефоны с тональным набором используют матрицу клавиатуры размером 3х4. Такая матрица позволяет кодировать сигналы частот всех возможных рядов, но только трех вертикальных колонок (см. рис. 5.17). Клавиатура размером 3х4 более доступна и будет использоваться во всех схемных решениях, описанных ниже.
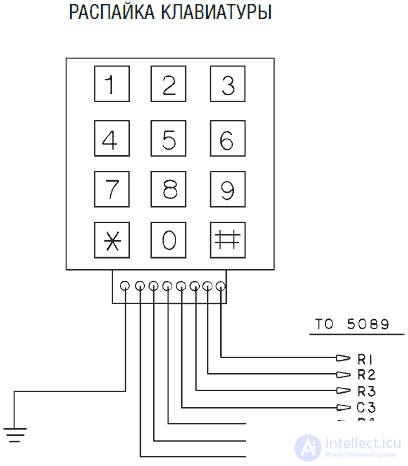
Рис. 5.17. Распайка телефонной клавиатуры 3х4
Не все клавиатуры от телефонов работают подобным образом, поэтому некоторые из них окажутся непригодными для наших схем. Например, некоторые клавиатуры имеют отличающуюся распайку выводов и требуют соответствующих ИС. По этой причине, если вы используете клавиатуру, то должны убедиться в ее правильном функционировании.
Изготовление кодера DTMF достаточно просто (см. рис. 5.18). Для этого потребуются клавиатура, кварцевый резонатор и ИС типа 5089. Цоколевка ИС 5089 показана на рис. 5.19. При использовании стандартной клавиатуры от телефона размером 3х4 вы потеряете возможность генерации 4-х DTMF кодов, связанных с отсутствующими клавишами, что снижает максимально возможное количество комбинаций до 12.

Рис. 5.18. Кодер DTMF, использующий матрицу клавиатуры 4х4
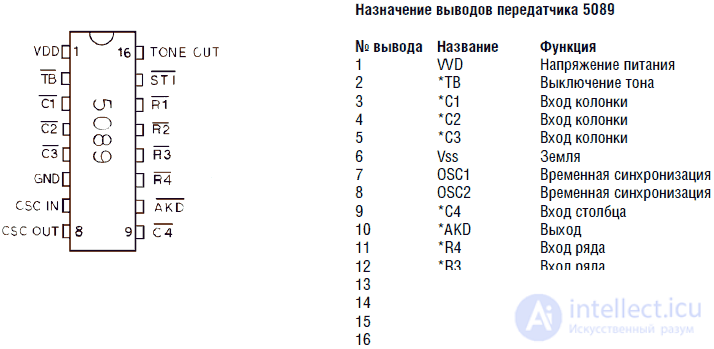
Рис. 5.19. Цоколевка кодера DTMF ИС 5089
На рис. 5.20 изображена тестовая схема кодера, в которой использованы восемь кнопочных выключателей. Эти выключатели в данном случае заменяют клавиатуру, с их помощью вы сможете проверить работу кодера и работу схемы приемника (декодера). Помните, что необходимо использовать кнопочные выключатели, работающие на замыкание. Для нормальной работы необходимо соединение одного из выводов R1-R4 и C1-C4 c землей, что осуществляется соответствующими кнопками.
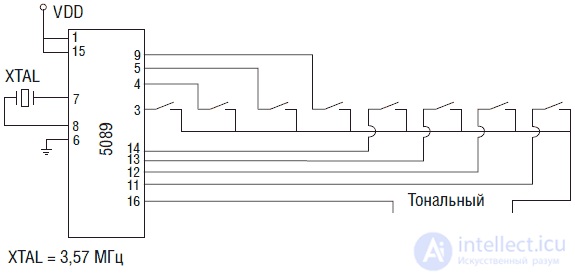
Рис. 5.20. Схема кодера, использующего восемь кнопочных переключателей
ИС способна генерировать одиночные тоны, что обычно предпринимается для целей тестирования. Например, чтобы сгенерировать тон частоты 1336 Гц, соответствующий выводу С2, необходимо замкнуть на землю вывод С2 и любые два вывода из группы рядов R1-R4. Такая операция и приведет к генерации чистого тона 1336 Гц. То же самое можно проделать для генерации тона из группы рядов. Для этого необходимо заземлить любые два вывода из группы колонок и необходимый для генерации заданной частоты вывод из группы рядов.
Декодирование сигналов DTMFДекодирование сигналов DTMF является немного более сложным, чем кодирование. Наиболее простым решением может явиться использование единственной ИС, на этот раз типа G8870 (рис. 5.21).

Рис. 5.21. Цоколевка декодера DTMF ИС G8870
ИС декодера имеет 4-битный выход с фиксацией состояния, обозначенный Q1-Q4. Q4 является старшим битом. Ток выходов Q1-Q4 достаточен для зажигания маломощных светодиодов. На рис. 5.22 показана основная схема приемника. Комбинация зажженных светодиодов, подключенных к выходам Q1-Q4, образует двоичное число. В таблице 5.3 приведены соответствия между кодами DTMF и соответствующими им двоичными числами. Схема построена так, что включенному светодиоду соответствует двоичная единица.
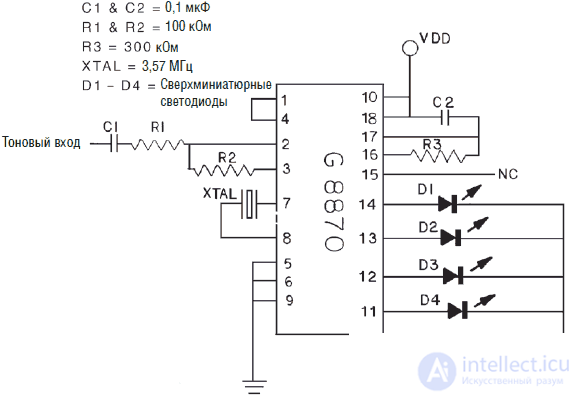
Рис. 5.22. Схема приемника с 4-битным выходом
Выводы Q1-Q4, соответствующие 4-битному числу, с выхода ИС G8870 могут быть непосредственно подключены к входным линиям микроконтроллера типа PIC 16F84. Такой микроконтроллер легко «читает» двоичные коды. Мы вернемся к использованию PIC микроконтроллеров в гл. 7.
Система связи на ИК лучах, которую мы будем рассматривать в следующих разделах, в комбинации с PIC микроконтроллером, разбираемым в гл.7, позволяет создавать программно управляемую систему коммуникации между роботами, используемыми в играх типа «салки» и в задачах следования за лидером.
Таблица 5.3. Сигналы DTMF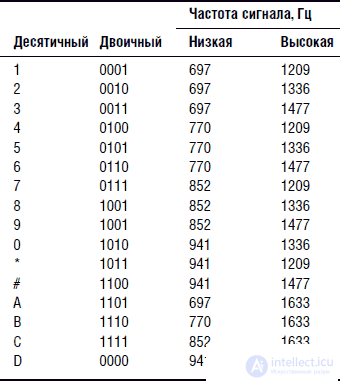
Если чтение двоичного кода представляется слишком утомительным, можно добавить десятичный цифровой индикатор. Выход ИС можно присоединить к двоично-десятичному дешифратору для 7-сегментных индикаторов типа 7448. ИС 7448 в свою очередь соединена с 7-сегментным индикатором типа MAN 74 (с общим катодом). Схема, включающая две ИС, позволяет осуществлять цифровую индикацию (см. рис. 5.23).
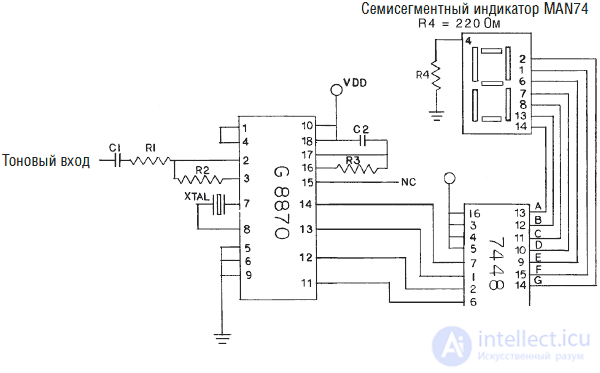
Рис. 5.23. Схема приемника с цифровой индикацией
Для проверки соедините выход ИС 5089 (вывод 16) с входом ИС G8870 и сгенерируйте сигнал DTMF с помощью кнопочных выключателей или клавиатуры. Декодер должен отобразить этот сигнал с помощью светодиодов или цифрового индикатора.
Использование ИК излучателяКак только вы убедились в работоспособности устройства, можно добавить в схему приемник и передатчик ИК излучения. Выход ИС 5089 соединяется с базой NPN транзистора, в эмиттер которого включается мощный ИК светодиод (см. рис. 5.24). Можно подключить диод непосредственно к выходу ИС 5089, но излучаемая мощность в этом случае будет мала. NPN транзистор производит добавочный ток для питания светодиода.
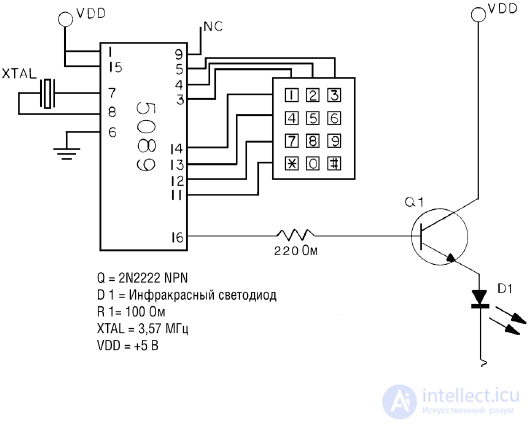
Рис. 5.24. Схема ИК передатчика DTMF
На рис. 5.25 показана входная часть схемы ИК приемника. ИК фототранзистор соединен с КПОП операционным усилителем. Такая комбинация элементов позволяет управлять ИС 8870 через ИК канал на расстоянии порядка метра.
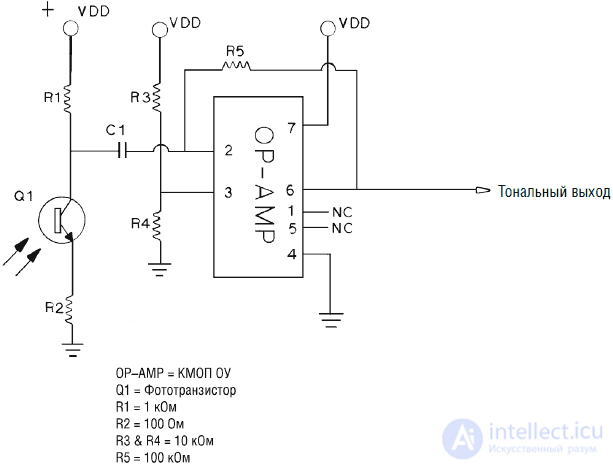
Рис. 5.25. Схема входной части ИК приемника DTMF
Используя ИК соединение, вы можете нажать клавишу с определенным номером на клавиатуре и увидеть соответствующую цифру, отображенную на цифровом индикаторе. Проверьте качество ИК связи по направлению и максимальному расстоянию. Увеличения дальности связи можно добиться, помещая ИК светодиод и фототранзистор в отдельные рефлекторы. Хорошо подходит для этой цели рефлектор от старой лампы-вспышки.
Устройство ДУ можно получить, добавив в схему ИС 4028, которая представляет собой двоично-десятичный дешифратор. Это означает, что при подаче параллельного двоичного кода на вход ИС (этим кодом зажигались светодиоды на рис. 5.22) на одном из выходов появится сигнал, соответствующий десятичной цифре. ИС 4028 имеет 10 выходов, обозначенных цифрами от 0 до 9. В зависимости от 4-битного кода на входе 4028, она выдает сигнал высокого уровня на одном из выходов (см. рис. 5.26).
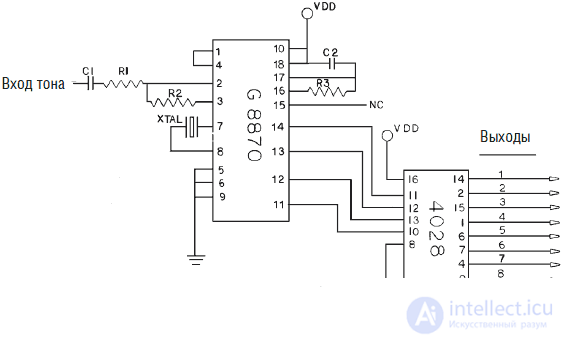
Рис. 5.26. Схема приемника DTMF с преобразованием шестнадцатеричного кода в десятичный
Удалять из схемы ИС 7448 и цифровой индикатор нет необходимости, поскольку ИС 8870 имеет достаточно мощный выход для подачи сигнала на обе ИС 7448 и 4028. При тестировании выхода ИС 4028 цифровой индикатор может оказаться очень удобным. Чтобы не загромождать чертеж, на рис 5.26 показана связь ИС 8870 только с ИС 4028.
Выходы ИС 4028 могут непосредственно использоваться для управления переключателями или другими частями схемы. Однако это не является удачным решением, поскольку при нажатии следующей клавиши (цифры) выход, соответствующий предыдущей цифре, отключится (сбросится на низкий уровень).
Для решения этой проблемы можно использовать D-триггер типа 4013 (рис. 5.27). Триггеры являются основными элементами компьютерной памяти. В этой схеме в качестве триггера используется двоичный счетчик. После первой логической «1» на выходе ИС 4028 выход триггера перебросится также в логическую «1». Когда на выходе 4028 появится логический «0», что соответствует включению другого канала, ИС 4013 будет удерживать логическую «1» на выходе (фиксация состояния).
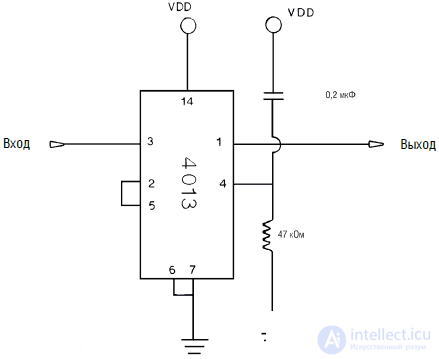
Рис. 5.27. Схема триггера ИС 4013
Чтобы опять перебросить выход 4013 в «0», необходимо просто включить соответствующий канал еще раз. Второй импульс, пришедший на вход ИС 4013, переключит ее выход в низкий уровень («0»). Чередование высокого и низкого уровней на выходе ИС 4013 происходит при каждой подаче «1» на ее вход.
Машинное зрение
Моделирование человеческого зрения при помощи машины является сложной задачей. Совершенно недостаточно присоединить видеокамеру к компьютеру и рассчитывать, что такая установка будет «видеть». Нейронные системы и программы ИИ должны считать видеоизображение и подвергнуть его обработке. Сейчас машинное зрение используется в ограниченных и специализированных областях.
В главе 1 я говорил о компьютерной системе Papnet, которая использует специальное нейронное программное обеспечения для анализа изображений эмульсионных мазков, обеспечивая точность, недоступную человеку-оператору. Некоторые исследователи разрабатывают системы управления автотранспортом, на основе визуального контроля очертаний дорожного покрытия.
Прежде чем мы сможем попытаться моделировать человеческое зрение, нам потребуется создать систему стереоскопически размещаемых камер (в дополнение к системе распознавания образов, что само по себе является непростой задачей). Некоторые исследования подобного рода проводятся в Массачусетсом технологическом институте, там создан робот-гуманоид COG. С помощью двух стереоскопических камер можно получить два изображения, которые обрабатываются и затем сравниваются для получения трехмерной картины. Этот процесс аналогичен получению трехмерных изображений у человека. Для определения глубины пространства каждая камера должна быть смонтирована на подвижном карданном подвесе, что позволит камерам сводить оптические оси (конвергировать) и фокусироваться на объекте. Для определения расстояния до объекта используется значение величины конвергенции.
Проблемы машинного зрения представляют благодатную почву для развития. В настоящее время большинство подобных систем требует мощных компьютеров и решает задачи обработки изображений.
Ощущение тела
Ощущение тела включает чувство его положения относительно опорных точек и в пространстве. Простейшее «чувство тела» можно смоделировать в роботе при помощи многочисленных датчиков наклона (см. рис. 5.28). По меньшей мере, робот сможет «понять», имеет ли он наклон вперед или назад, находится на «животе» или на «спине», вверх ногами или на правом боку. На основе полученной информации о положении тела робот может совершить некоторые действия и изменить свое положение.
Рис. 5.28. Датчики наклона
Индикатор направления – магнитной поле
Информацию о направлении можно полунить с помощью электронного компаса, использующего магнитное поле Земли. Это позволит роботу двигаться в заданном направлении или получать информацию о направлении перемещения.
Наиболее простым устройством является цифровой компас модели 1490 (рис. 5.29). Компас представляет собой твердотельный датчик Холла. Устройство снабжено четырьмя выводами, соответствующими положению четырех основных сторон света: север, восток, юг и запад. При использовании небольшого логического устройства можно определить восемь направлений.
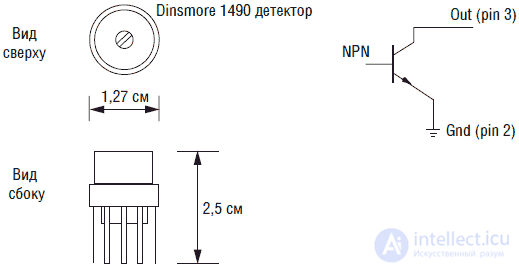
Рис. 5.29. Цифровой компас 1490
Компас демпфирован таким образом, что его характеристики близки характеристикам компаса с жидкостным наполнением. Для поворота на угол 90° компасу требуется порядка 2,5 с. Демпфирование предотвращает крутильные колебания устройства и эффект дрожания вблизи указываемого направления. Устройство чувствительно к углу наклона. При угле наклона более 12° погрешности измерения превышают допустимые.
На нижней части устройства расположены двенадцать выводов, объединенных в четыре группы по три вывода. Если смотреть на компас сверху, то его выводы в группе обозначены 1, 2 и 3. Вывод 1 соединен с источником питания (5 В), вывод 2 соединен с землей. Выводы 3 каждой группы являются информационными выходами. Данные выходы аналогичны схеме NPN транзистора, включенного с общим коллектором. В таком включении выход не производит напряжение, но может пропускать значительный ток (до 20 мА), который достаточен для зажигания светодиода.
Тестовая схема изображена на рис. 5.30. Датчик сохраняет работоспособность в диапазоне питающего напряжения от 5 до 18 В. В данном случае используется батарея напряжением 9 В и регулятор напряжения на 5 В, выполненный на ИС 7805.

Рис. 5.30. Тестовая схема цифрового компаса с 4 светодиодами
Возьмите за правило: с целью безопасного сопряжения схем с компьютерными устройствами, не устанавливайте рабочих напряжений выше 5 В. Например, если мы сопрягаем электронный компас с интерфейсом PIC микроконтроллера и будем использовать напряжение питания 9 В, то слишком большое напряжение на выходе компаса может пережечь входные цепи микроконтроллера.
Для указания направления в тестовой схеме использованы светодиоды. По мере поворота устройства, каждое из основных направлений (сторон света) индицируется одним светодиодом. Промежуточные направления вызывают зажигание двух светодиодов.
Проверка и калибровка
При помощи обычного компаса найдите направление на север. Поворачивайте устройство до тех пор, пока не загорится один светодиод. Для удобства я использую момент зажигания светодиода, наиболее удаленного от датчика. Если вы сделаете то же самое, то автоматически получите последовательность, отображенную на рис. 5.31.
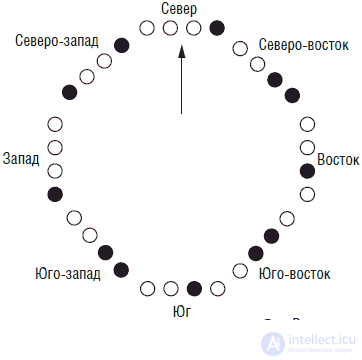
Рис. 5.31. Последовательность включения светодиодов
Компьютерный интерфейс
Четыре линии выхода компаса формируют 4-разрядное двоичное число (полубайт), которое можно легко считать с помощью микроконтроллера, компьютера или иной схемы (см. табл. 5.4). До момента рассмотрения схемы работы PIC микроконтроллера 16F84 в гл. 7 мы не будем рассматривать схемы его подключения.
Таблица 5.4. Назначение светодиодов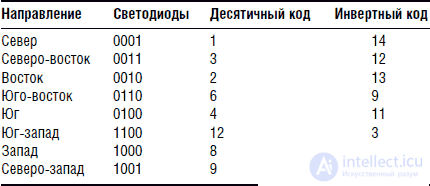
Электронный аналоговый компас типа 1525
В большинстве случаев информации о направлении, выдаваемой устройством 1490, более чем достаточно для правильной работы робота. Однако в каких-то случаях требуется более точное определение направления, и в этом случае можно воспользоваться аналоговым электронным компасом типа 1525 (см. рис. 5.32).
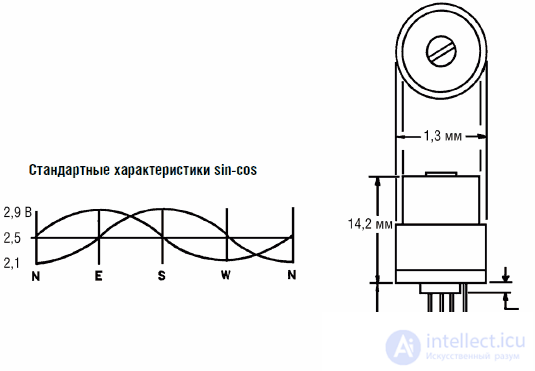
Рис. 5.32. Электронный аналоговый компас типа 1525
Выходная информация устройства 1525 требует гораздо более сложной обработки, но преимущество такого электронного компаса в том, что он определяет направление с точностью порядка 1°.
Выходной сигнал представляет собой два синусоидальных колебания, сдвинутых по фазе на 90° одно относительно другого (см. положение фаз колебаний на рис. 5.32). Амплитуда каждого колебания зависит от направления устройства. Если амплитуда четверти колебания (фаза 90°) преобразуется 8-битным АЦП, то разрешение устройства будет порядка 1°.
Система глобального позиционирования (GPS)
Использование системы глобального позиционирования (GPS) позволит роботу определить свое местонахождение с большой точностью в любом месте Земли. Использование GPS в большинстве случаев не является действительно необходимым, но снижение стоимости подобных систем делает их возможное применение вполне реальным.
Распознавание речи
Диапазон слышимости человеческого уха лежит в пределах от 10 до 15.000 Гц. Для регистрации звуковых колебаний могут использоваться микрофоны и усилители, причем диапазон «слышимости» микрофона, как правило, превышает возможности уха. Для робототехники использование звука является ценным инструментом.
В обычной жизни слух используется преимущественно для коммуникации (язык). Создание робототехнических систем распознавания речи сейчас очень популярно. По этой причине мы посвятим целую главу (см. гл. 7) созданию схем распознавания речи и их интерфейсов. Но, тем не менее, не пропустите следующую информацию, поскольку использование звуковых систем в роботах может оказаться очень полезным.
Звуковые и ультразвуковые системы
Звук может быть использован в играх, определении расстояний, предотвращении столкновений и объезде препятствий. Для игры в «салки» роботы снабжены двухтональным генератором и приемником. Каждый робот может генерировать и принимать сигналы двух тонов. Допустим, тон А составляет 3000 Гц, а тон В – 6000 Гц. Эти тоны издаются при любом столкновении роботов (используются контактные выключатели).
Робот, который является «салкой» (водящим), издает звук тона В при любом столкновении «бамперов» с другим роботом. Робот, который является «не водящим», в этом случае издает звук тона А. Напомним, что при столкновении «водящий» робот издает звук В. «Не водящий» робот слышит звук В, переключается и становится «водящим». В свою очередь «водящий» робот слышит звук А и становится «не водящим». При столкновении двух «неводящих» роботов каждый издает звук тона А, поэтому их состояние не меняется. Понятно, что мы использовали звуковые сигналы в качестве примера. С тем же успехом можно использовать системы коммуникации на ИК лучах.
Для определения расстояний и обнаружения препятствий часто используется ультразвук. Многие конструкторы остановились на использовании ультразвуковых модулей компании Polaroid (см. рис. 5.33). Подобные модули используются в фотокамерах Polaroid для быстрого определения расстояния до объекта и фокусировки объектива с целью получения четкого изображения. При соединении с интерфейсом микроконтроллера подобные устройства способны измерять расстояния с большой точностью.
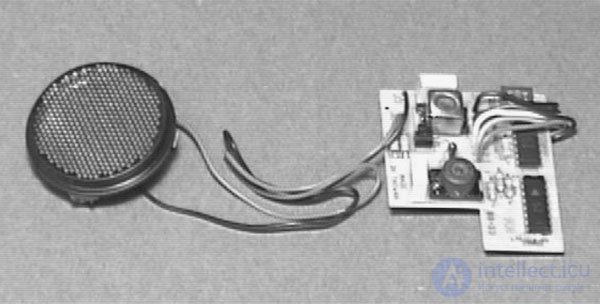
Рис. 5.33. Ультразвуковой дальномер типа Polaroid
Такие датчики фирмы Polaroid очень удобны для использования в роботах с целью определения расстояний. Устройство способно измерять расстояния до 10 м. При использовании сервомотора или шагового двигателя устройство можно поворачивать на манер радара для составления навигационной карты или обнаружения свободного прохода.
При каждом включении УЗ преобразователь фирмы Polaroid издает слышимый щелчок. Эти постоянные щелчки, исходящие от датчика, кажутся мне раздражающими. Хотя модуль функционирует в ультразвуковом диапазоне, начальный процесс возбуждения УЗ излучателя сопровождается слышимыми звуками.
Относительно легко создать УЗ систему избегания столкновений, которая, будучи полостью ультразвуковой, работает «тихо». Основная схема повторяет схему избегания столкновений на ИК лучах, с тем отличием, что мы используем звук вместо света. На рис. 5.34 показана функциональная схема устройства. Передатчик посылает сигнал 40 кГц в УЗ преобразователь (излучатель). Другой преобразователь (приемник) расположен рядом с излучателем передатчика. Когда робот приближается к стене или препятствию, сигнал 40 кГц отражается и попадает в приемник, что вызывает повышение амплитуды его выходного напряжения. Когда напряжение превысит пороговое значение, компаратор перебросится в другое состояние, сигнализируя о наличии препятствия.
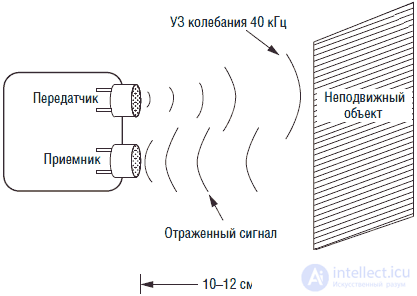
Рис. 5.34. Схема УЗ детектора препятствий
УЗ приемный блок
УЗ приемный блок (см. рис. 5.35) используется для точной настройки передатчика. Дело в том, что УЗ преобразователи имеют резонансную частоту 40 кГц. Если частота отличается от резонансной (±750 Гц), то эффективность преобразователя резко падает. Точная настройка преобразователя на максимум резонанса не составляет трудности, если вы воспользуетесь процедурой, описанной ниже. Для этого потребуется авометр, измеряющий постоянный ток, со шкалой 2 В.
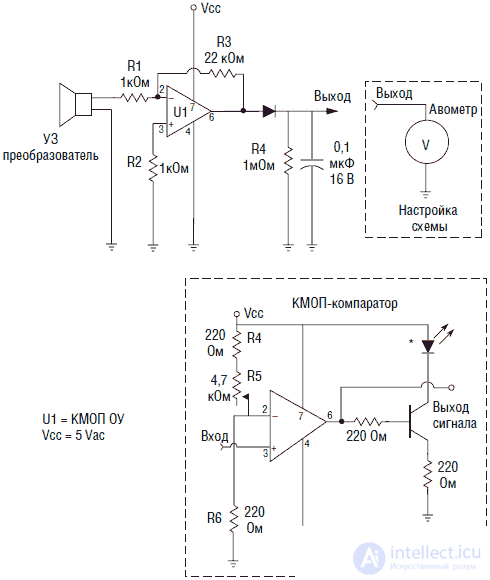
Рис. 5.35. Схема УЗ приемника
Поскольку преобразователи имеют очень узкую полосу пропускания, (резонанс лежит около частоты 40 кГц), использование петли ФАПЧ (ИС LM567) не является необходимым. Сам преобразователь подавляет сигналы вне его частотного диапазона.
В приемном блоке использован ОУ КМОП-структуры. Цоколевка корпуса усилителя с 8 выводами аналогична универсальной ИС типа 741 (но не является заменой ОУ 741). ОУ включен в схему с инвертированным входом и имеет коэффициент усиления порядка 22.
УЗ передающий блок
УЗ передающий блок выполнен на ИС КМОП-структуры типа 555, включенной в режиме генерации. Для точной подстройки частоты использован подстроечный резистор R2 4,7 кОм (см. рис. 5.36).
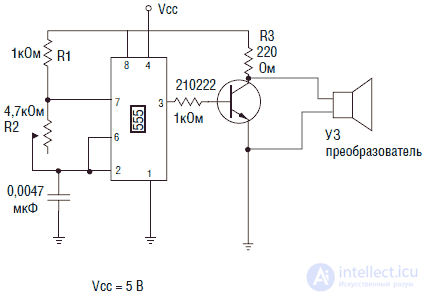
Рис. 5.36. Схема УЗ передатчика
Расположите УЗ преобразователи (излучатели) навстречу друг другу на расстоянии 10–15 см (см. рис. 5.37). Присоедините вольтметр, как показано на вставке к рис. 5.35 (компаратор при этом нужно отсоединить). Установите авометр на измерение напряжения постоянного тока. Выходное напряжение будет порядка 2 В, соответственно необходимо установить нужный предел измерения. Включите одновременно оба устройства. Подстраивая передатчик с помощью R2, добейтесь максимума выходного напряжения на вольтметре, которое должно составлять порядка 2 В.
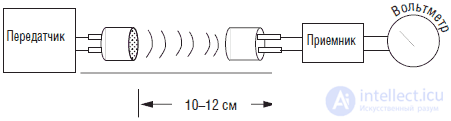
Рис. 5.37. Проверка работы УЗ устройства
После настройки передатчика мы должны настроить схему компаратора. Отсоедините вольтметр и присоедините компаратор. Расположите УЗ преобразователи в ряд, в одном и том же направлении на расстоянии примерно 15 мм друг от друга. Расположите предмет с плоской гранью на расстоянии примерно 75 мм перед УЗ преобразователями. Включите приемник и передатчик и подстраивайте резистор R5 приемника до зажигания сверхминиатюрного светодиода.
Для проверки работы схемы уберите предмет, расположенный перед излучателями. В этом случае светодиод должен погаснуть. Отодвиньте предмет на расстояние 12–15 см и еще раз подстройте R5 до зажигания светодиода. Помните, что приемник очень чувствителен к углу отражения. Если предмет имеет острый угол, то ультразвуковой сигнал может отразиться «вбок» от приемника. По мере приближения объекта угол отражения становится менее критичным.
Устройство способно обнаруживать объекты на расстояниях до 20 см. На больших расстояниях угол отражения становится очень критичным. Я использовал перпендикулярное положение излучателей. Для различных расстояний можно немного поворачивать излучатели.
При обнаружении объекта на расстоянии до 15 см устройство стабильно выдает TTL сигнал высокого уровня, зажигающий светодиод. Этот сигнал можно легко использовать для управления нейросетью или микроконтроллером.
Расположение УЗ датчиков
Очевидными способами использования УЗ преобразователей (датчиков) является обнаружение препятствий спереди, сзади и по бокам робота. Другим применением, не столь очевидным, является мониторинг поверхности. Если закрепленный спереди УЗ датчик наклонен немного вниз, то он может предоставлять информацию о состоянии поверхности, по которой движется робот. Если робот достигает обрыва или «ступеньки», то нормально высокий сигнал становится низким, информируя ЦПУ о необходимости остановки движения.
Осязание и чувство давления
Поразительная точность и верность чувства осязания у человека едва ли может быть достигнута в конструкции робота. Однако существует несколько типов простых датчиков, которые можно использовать для обнаружения прикосновения и давления. Датчики прикосновения обычно используются в роботах для обнаружения препятствий на пути следования, что позволяет роботу избегать столкновений.
Более совершенные датчики прикосновения и давления используются в конструкциях рук и кистей. Такие датчики позволяют «руке» робота захватывать и удерживать предметы с достаточным усилием без риска их повреждения. Простой датчик прикосновения и давления можно изготовить из электростатического (проводящего) поролона. Подобный поролон используется при упаковке ИС для защиты их от статического электричества. Такой поролон обладает определенной электрической проводимостью, которая изменяется при сжатии.
Необходимо использовать неплотный (мягкий) тип поролона, поскольку он имеет пористое строение и обладает достаточной гибкостью. При нажатии поролон сжимается, что приводит к изменению сопротивления между наложенными на него электродами.
На рис. 5.38 приведен чертеж простого датчика давления. Проводящие пластины (электроды) могут быть изготовлены из фольгированного материала для печатных плат, алюминиевой фольги или чего-то подобного. Более точные датчики касания и давления будут рассмотрены в этой главе ниже.
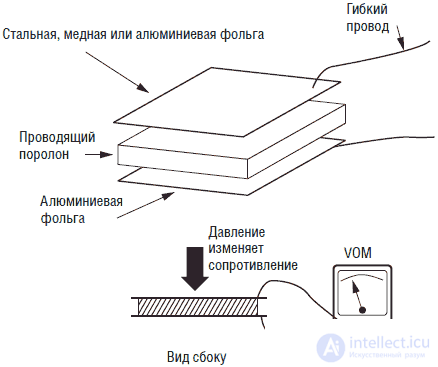
Рис. 5.38. Датчик давления на базе проводящего поролона
Пьезоэлектрические материалы
Существует большое количество разнообразных пьезоэлектрических датчиков. Пьезоэлектрические датчики могут регистрировать вибрации, толчки и тепловое излучение. Компания Pennwall производит уникальный продукт, названный пьезоэлектрической пленкой. Она представляет собой пластик, покрытый алюминием таким образом, что он приобретает пьезоэлектрические свойства.
Материал имеет достаточную чувствительность для обнаружения теплового излучения человека, перемещающегося перед поверхностью пленки. Многие коммерческие устройства охранного включения света, продающиеся в магазинах оборудования, используют датчики в виде пьезоэлектрической пленки, помещенные за линзой Френеля, для обнаружения присутствия человека по его тепловому излучению. Такие устройства автоматически включают свет при попадании человека в «поле зрения» прибора.
Выключатели
Выключатели мгновенного действия (кнопочные) по типу образуют груп пы датчиков касания, указателей направления и конечных выключателей Разнообразие типов подобных выключателей обеспечивает свободу их вы бора. Наиболее часто в робототехнике используются выключатели мгновен ного действия рычажного и кнопочного типов (см. рис. 5.39).
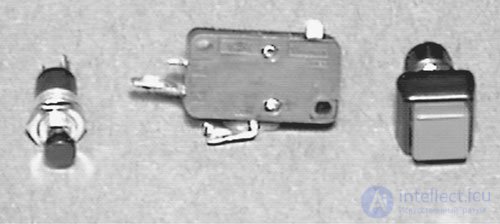
Рис. 5.39. Выключатели мгновенного действия (кнопки)
Датчики изгиба
Датчики изгиба представляют собой пассивные элементы резистивного типа, сопротивление которых увеличивается при изгибе или скручивании (см. рис. 5.40 и 5.41). Такие датчики обычно используются в специальных перчатках систем виртуальной реальности для определения положения пальцев в перчатке, и могут быть легко приспособлены для нужд робототехники. Такой датчик изгиба может представлять собой род щупальца и предупреждать робота о наличии препятствия.

Рис. 5.40. Датчик изгиба
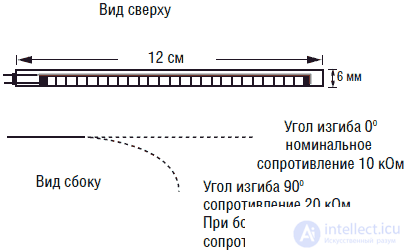
Рис. 5.41. График сопротивления датчика изгиба
Подобные устройства напоминают усы у кошки. Кошки используют усы для определения того, является ли проход достаточно широким, чтобы туда можно было пройти. Если усы по обеим сторонам кошачьей мордочки сигнализируют о наличии препятствия, то кошка туда не пойдет. Подобным образом можно использовать датчики давления и в роботах.
Тепловые датчики
Наиболее известными тепловыми датчиками являются термисторы (см. рис. 5.42). Это устройство пассивного типа изменяет сопротивление пропорционально температуре. Существуют термисторы, имеющие положительный и отрицательный температурный коэффициенты (см. рис. 5.43). Температурное излучение также может быть обнаружено с помощью пьезоэлектрических материалов, о чем говорилось выше.
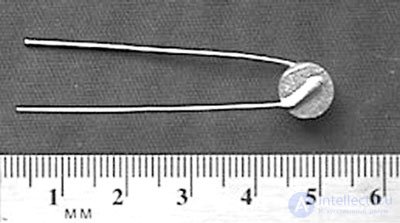
Рис. 5.42. Термистор
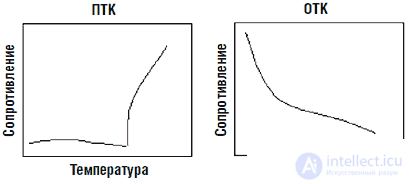
Рис. 5.43. Графики температурной зависимости сопротивления термистора с положительным и отрицательным ТК
Датчики давления
Для измерения сил хорошо подходят датчики давления, изображенные на рис. 5.44. «Чувствительный» элемент датчика расположен на специальной подложке размерами 14х14 мм на одном конце устройства. С увеличением приложенной силы сопротивление датчика падает. Датчики выпускаются для различных диапазонов приложенных сил: от 0–4 Н до 0-4000 Н.
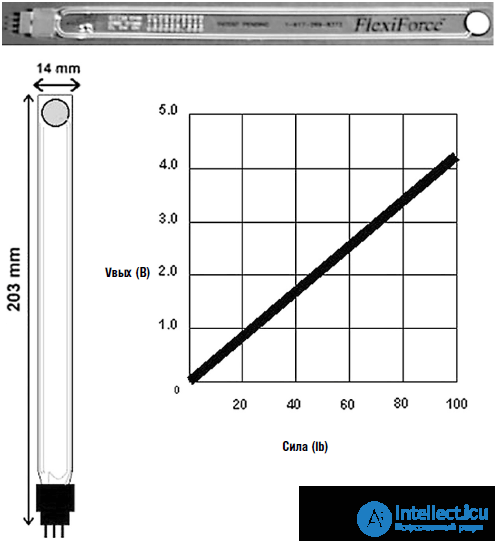
Рис. 5.44. Датчик давления Flexiforce
Датчики запаха
Диапазон реакций на запахи человеческого носа в настоящее время недостижим ни одной из известных искусственных сенсорных систем. Известны простые газовые датчики, способные обнаружить присутствие токсичных газов (см. рис. 5.45). Подобные датчики могут быть использованы для создания автоматических (роботизованных) систем вентиляции.

Рис. 5.45. Датчики ядовитых газов
Пример включения простого газового датчика представлен на рис. 5.46. Для создания чувствительности резистивный элемент должен быть подвергнут нагреву. Устройство снабжено встроенным подогревателем, питающимся от отдельного источника. Подогреватель потребляет около 130 мА при стабилизированном напряжении питания 5 В. Показания резистивного элемента могут быть считаны аналогично описанному выше.
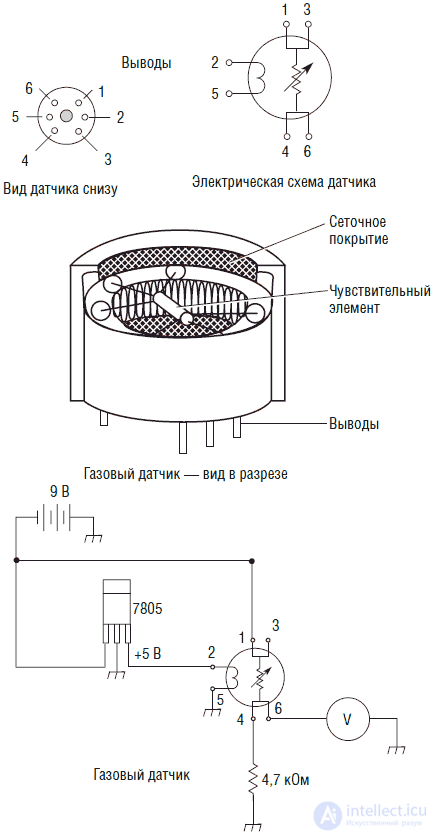
Рис. 5.46. Проверка работы датчиков токсичных газов
При использовании простых схем возможности газовых датчиков раскрываются не полностью. Дело в том, что одиночный датчик не выдает достаточно точных показаний. Иными словами, показания датчиков немного изменяются от экземпляра к экземпляру. Это «аналоговое» свойство группы датчиков может быть использовано для создания более чувствительного устройства.
Рассмотрим группу из восьми датчиков, резистивный элемент каждого из которых подключен к АЦП. В данной ситуации использование компаратора неэффективно, поскольку нас как раз интересует небольшая разница в показаниях отдельных датчиков. Для калибровки устройства необходимо выпустить небольшую порцию известного газа (запаха) на все восемь датчиков. Показания каждого из них преобразуются АЦП и записываются в компьютер. Разница показаний датчиков формирует профиль для каждого анализируемого запаха.
Подбор профиля хорошо реализуется в технологии нейронных сетей. Нейронная сеть может быть создана таким образом, что окажется в состоянии определять не только интенсивность, но и распознавать различные запахи.
Датчики влажности
Пассивные датчики влажности с резистивным выходом представляют собой относительно новую разработку и доступны к приобретению.
Проверка датчиков
При разработке и изготовлении систем чувствительных датчиков представляется разумным производить их тестирование перед установкой в систему робота. Одним из способов, который я осуществил, являлось создание небольшого передвижного робота, единственной функцией которого была проверка работоспособности и характеристик датчиков. Таким образом, оказалось возможным оценить время срабатывания датчика и его надежность до установки в более сложную конструкцию робота.
Робот способен тестировать «ударные» выключатели, световые выключатели, датчики изгиба, а также системы датчиков предотвращения столкновений, использующих ультразвук и ИК лучи. Прочие типы датчиков могут потребовать тестовой платформы больших размеров.
Изготовление робота-тестера
Я назвал конструкцию этого небольшого устройства роботом-тестером. В основе ее лежит небольшой электрический автомобиль, который можно приобрести менее чем за $10 (см. рис. 5.47).
Рис. 5.47. Тестер
Принципиальная схема робота-тестера изображена на рис. 5.48. Сенсор подключается к входу запуска таймера ИС типа 555, использованной в режиме одновибратора. На выходе схемы (вывод 3) присутствует напряжение низкого уровня до момента подачи отрицательного запускающего импульса на вывод 2. После этого на выводе 3 генерируется одиночный положительный импульс длительностью порядка 1 с.

Рис. 5.48. Схема работы тестера
Вывод 3 ИС 555 соединен с NPN транзистором типа 2N2222. Выходной сигнал снимается с эмиттера транзистора и поступает на одну из 6 схем «НЕ» инвертора, выполненного на ИС 4049. Выходы буферов схем «НЕ» 4049 поступают на МОП полевые транзисторы, включенные по схеме моста, которые управляют вращением двигателя привода.
При наличии низкого уровня на выходе ИС 555 транзисторы моста включают двигатель для движения «вперед». Тестируемый датчик подключен к входу запуска 2 ИС 555. Датчик включен таким образом, что при замыкании или коммутировании он выдает отрицательный импульс (садится на землю). Этот импульс на выводе 2 запускает одновибратор, который в свою очередь выдает положительный импульс длительностью 1 с на вывод 3. Данным импульсом транзисторы перекоммутируют двигатель на 1 с для движения «назад».
Подобный тестер может быть использован для проверки большинства датчиков и преобразователей.
Усовершенствование робота-тестера
Когда я разрабатывал конструкцию робота-тестера, то предполагал что большинство проверяемых датчиков будет использовано в конструкциях миниатюрных моделей. Однако вышло по-другому. В процессе конструирования различных схем-прототипов, как правило, не хватало времени для изготовления печатной платы, не говоря уже о минимизации размеров устройства.
Если бы я создал другого робота-тестера, я бы, несомненно, использовал большую модель электрического автомобиля в качестве платформы. Наличие достаточного места позволило бы с большим удобством проверять различные типы датчиков и иных схем.
В общем, мой друг ты одолел чтение этой статьи об сенсорика роботов сис чувствительных датчиков . Работы впереди у тебя будет много. Смело пиши комментарии, развивайся и счастье окажется в твоих руках. Надеюсь, что теперь ты понял что такое сенсорика роботов сис чувствительных датчиков и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника

Комментарии