Лекция
Привет, сегодня поговорим про аэророботы, обещаю рассказать все что знаю. Для того чтобы лучше понимать что такое аэророботы, аэроробот, летающий робот , настоятельно рекомендую прочитать все из категории Робототехника.
аэроробот ы представляют собой класс роботов, которые умеют летать. Сюда включаются аппараты легче воздуха (дирижабли), вертолеты и самолеты. Подобные аппараты находят применение в автономных и беспилотных полетах, военном деле, наблюдении с воздуха, индустрии развлечений и системах телеслежения.
Беспилотная авиация имеет достаточно долгую историю: первые аппараты появились еще в начале 20-х годов. Один из таких беспилотных летающих аппаратов имел кодовое название «жук» и был предназначен для военных целей. Длина «жука» составляла 3,6 метра, а размах крыльев – 4,5 метра. Его навигационная система была достаточно совершенной для того времени и включала гироскоп, альтиметр и пневматические и электрические системы управления. Система управления полетом направляла аппарат на 50–70 км вглубь вражеской территории. Когда самолет достигал заданного региона, аппарат сбрасывал крылья, и тяжелый фюзеляж сбрасывался на землю, неся при этом 200-фунтовый заряд взрывчатки. Однако устройство не нашло массового применения в связи с окончанием 1-й Мировой войны.
С самого начала конструкции подобных беспилотных аппаратов подвергались постоянным улучшениям и модификациям. Последние модели беспилотных самолетов применялись в войне в Персидском заливе. Эта акция почти не нашла отражения в прессе, хотя было совершено более 300 вылетов. Эти аппараты были использованы в разведке для оценки потерь противника и обнаружения складов вооружений. Наиболее известными и совершенными беспилотными летательными аппаратами можно назвать самонаводящиеся межконтинентальные ракеты с ядерными боеголовками.
Системы дистанционного управления и «присутствия» на летательных аппаратах также имеют достаточно длинную историю, правда, не такую долгую, как беспилотные аппараты. США использовали во 2-й Мировой войне дистанционно управляемые самолеты для полетов «камикадзе». Системы управления того времени, конечно, не идут ни в какое сравнение с современными совершенными устройствами. Эти системы были недостаточно и надежны, и чтобы точно пилотировать аппарат, пилоту приходилось визуально наблюдать за полетом.
Сегодня дистанционно управляемые летательные аппараты имеют видеокамеры, передающие изображение пилоту-оператору. Пилот может находиться в любой точке Земли. Подобные системы сегодня превратились в системы телеслежения на базе принципов виртуальной реальности.
Мы изготовим аэроробота – дирижабль с системой телеслежения. Я решил сделать аппарат легче воздуха, поскольку в сравнении с моделью самолета или вертолета он более безопасен, не производит шума, дешев и прост в изготовлении.
Дирижабли летают тихо, медленно, грациозно и «прощают» ошибки пилотирования. Основной причиной моего решения была безопасность. Если дирижабль столкнется с предметом или человеком, то он не сможет причинить ему какого-либо вреда. С другой стороны, самолет или вертолет могут быть опасны для человека (вращающийся винт самолета или вертолета может случайно стать смертельным оружием), когда полет совершается в непосредственной близости от людей.
Мы изготовим модель небольшого дирижабля с мягкой оболочкой (далее, просто «дирижабль» – прим. переводчика), предназначенного для полетов внутри помещения. Необходимо очень тщательно отнестись к подбору деталей конструкции, которые должны иметь исключительно малый вес. Подъемная сила дирижабля составляет около 6 унций. Это означает, что приемник радиоуправления, движитель, источник питания, ПЗС видеокамера и передатчик видеоизображения должны иметь вес, не превышающий 185 грамм. Ограничение очень строгое, но выполнимое.
Виды летательных аппаратов легче воздуха
Летательные аппараты легче воздуха составляют три категории: жесткие, полужесткие и нежесткие (с мягкой оболочкой). Оболочка жестких летательных аппаратов обычно сделана из легкого алюминия. Наиболее известными являются цепеллины.
Полужесткие аппараты имеют жесткую кабину, расположенную в килевой части аппарата. Мягкая оболочка, наполненная гелием, крепится сверху.
Наиболее известными сегодня являются аппараты нежесткого (мягкого) типа. Это и есть шары-дирижабли. Наиболее известными являются шары Goodyear, используемые в рекламных целях. Такой шар-дирижабль представляет собой мягкую оболочку, принимающую форму при заполнении гелием.
Системы дирижаблей
Наиболее часто дирижабли используются сегодня для наблюдения за ходом футбольных матчей с высоты птичьего полета. Также шары – дирижабли используются в рекламных целях.
Технология подобных аппаратов может показаться устаревшей, однако ученые и инженеры находят для них все новые применения. Например, в армии США используется аппарат SASS LITE (мини-система слежения и обнаружения одиночных объектов), которая используется для патрулирования границ. Недавно производитель объявил, что 90-футовый летательный аппарат можно также использовать и для коммерческих целей.
Шары, наполненные гелием, способны достигать верхних слоев стратосферы. Одна из компаний предложила создать летающую воздушную станцию на высоте более 30 км над Землей. По аналогии со спутником, с подобной станцией будет осуществляться телекоммуникационная связь. При этом стоимость подобной станции будет составлять 50 % от стоимости спутника, оснащенного аналогичным оборудованием.
Роботизованные системы и системы телеслежения устанавливаются на модели дирижаблей уже в течение ряда лет. Мы вкратце расскажем о двух проектах, одном от The Robot Group и другом от Berkley's WEB Blimp. Затем мы сосредоточимся подробно на установке простой системы телеслежения на модели дирижабля. В действительности система телеслежения представляет собой портативную, легкую беспроводную систему телевидеонаблюдения. Сенсорные системы обратной связи, типа датчиков прикосновения, имитирующих чувство осязания, которые необходимы для «реальной» системы телеслежения, не разработаны. Наша простая система передает изображение и звук. Пользователь или оператор могут управлять полетом дирижабля через систему радиоуправления.
The Robot Group – Остин, Техас
На модель дирижабля была установлена роботизованная система. The Robot Group из Остина, штат Техас продемонстрировала робот-дирижабль на первом фестивале Robofest осенью 1989 года. Я уверен, что роботизованные системы, установленные на дирижаблях, использовались и ранее в военных или научных целях, однако The Robot Group представила частные (не финансируемые правительством) исследования в этой области. The Robot Group продолжает развивать и совершенствовать роботизованные дирижабли. В 1991 году был представлен проект компьютеризованного дирижабля Mark III, использующий ультразвуковые датчики и нейронные сети в качестве системы навигации. Хотя система в общем не оправдала надежд разработчиков, ее функционирование можно признать вполне удовлетворительным.
У The Robot Group есть сайт в Интернете, который вы можете посетить и получить свежую информацию (электронный адрес в конце главы).
WEB Blimp – университет Беркли, Калифорния
Космический «собиратель» – это имя было дано системе телеслежения, размещенной на дирижабле, которая была разработана и изготовлена в университете Беркли, Калифорния, на факультете радиоэлектроники и вычислительной математики. Об этом говорит сайт https://intellect.icu . Эти дирижабли можно представить «аватарами», или «небожителями», или, как я их предпочитаю называть, – «големами».
Группа из Беркли предприняла усилия по созданию системы телесного «перевоплощения». Настоящая система телесного «перевоплощения» требует комплексной системы сенсорной обратной связи от дирижабля «аватара» к оператору. В настоящее время система обратной связи включает передачу звука и изображения, а пользователь может управлять дирижаблем по радио.
Наиболее интересным в конструкции этого дирижабля является то, что он может управляться через сеть Интернет (отсюда его название – WEB Blimb, т. е. WEB дирижабль). Видеоизображение передается в сеть через видеокарту формата CU-SeeMe. WEB дирижабль доступен в сети через вебсайт Беркли (см. адрес доступа в конце главы).
Создание дирижаблей систем телеслеженияв виде «аватаров» и «големов»
Хорошо там, где нас нет! Роботизованные дирижабли или подобные конструкции имеют большое будущее в индустрии дистанционного наблюдения и телеслежения. Представьте, что вы хотите посмотреть несколько картин в Парижском Лувре, посетить Американский музей естественной истории в Нью-Йорке, затем оказаться в Смитсоньевском институте в Вашингтоне и, наконец, понаблюдать за пингвинами на Галапагосских островах. И условимся, что все путешествие должно занять пару часов.
Одним из способов совершить это в реальном времени – это использовать системы телеслежения. Однажды в будущем появятся телероботы, снабженные «зрением», которые смогут связаться по телефонному (или спутниковому) каналу с вашей домашней системой виртуальной реальности. Эти роботы будут расположены во многих интересных местах по всему земному шару.
Телероботы будут не только привязаны к Земле. Будут созданы роботы, находящиеся в космосе, под водой или летящие в воздухе. Проект Джейсона предполагает создание подводной системы научно-познавательных «приключений» для школьников. Через систему телекоммуникационной связи школьники смогут связаться с учеными, находящимися на далеком судне. Студенты смогут узнать о том, чем занимаются ученые, задать вопросы и иногда пилотировать TROV (средство передвижения, снабженное системой телеслежения), используя систему телекоммуникации.
Путешествие на Луну
Компания Lunacorp в Фэйрфаксе, штат Вирджиния, планирует запустить вездеход гражданского применения на Луну (см. рис. 14.1). Какую-то часть времени этот вездеход будет использоваться как система телеслежения с управлением с Земли (см. рис. 14.2). К сожалению, цена такого «вождения» высока и составляет примерно $7000 в час. Я не знаю как вы, а я бы пожертвовал $120, чтобы поездить на вездеходе по лунной поверхности в течение минуты.

Рис. 14.1 Вездеход Lunacorp
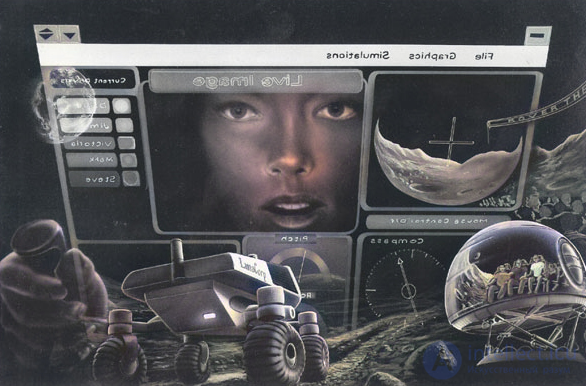
Рис. 14.2. Система телеслежения Lunacorp. Версия художника
Lunacorp планирует доставить вездеход на Луну в район моря Спокойствия. Но мы отклонились от нашей темы о дирижаблях.
Параметры дирижабля
Для эффективного использования в наземных системах телеслежения дирижабли должны удовлетворять нескольким критериям. Дирижабль должен быть абсолютно безопасен для окружающих людей. Дирижабли должны быть способны перемещаться по тем же направлениям, которые используют люди. ПЗС видеокамера должна находиться примерно на уровне глаз человека. Дирижабль должен без особых трудностей противостоять небольшому встречному ветру.
Система балласта должна позволять дирижаблю «зависать» в положении нулевой плавучести на одном или нескольких этажах здания. Если создание такой балластной системы представляет трудность, то необходимо разместить дирижабли с нулевой плавучестью на каждом этаже. При смене этажа оператор должен легко подключаться к неиспользуемому роботу телеслежения, находящемуся на требуемом этаже.
Физические ограничения накладываются на дирижабли в силу их малого веса. Например, дирижабль не может толчком открыть дверь. Здания требуют реконструкции, при которой двери и лифты будут управляться электронным способом по командам, поступающим с дирижабля.
Набор для конструирования дирижабля
Мы будем изготовлять дирижабль из прочного материала типа Mylar. Материал можно соединять путем горячей сварки с помощью бытового утюга. Существует множество возможных форм дирижаблей: в виде летающей колбасы, в виде крыла дельтаплана или обычного дирижабля – шара типа Goodyear. Я предлагаю простейшую конструкцию – дирижабль в форме подушки.
Изготовить дирижабль в форме подушки очень просто. Согните лист материала Mylar пополам (блестящей стороной наружу). Соедините сваркой его три открытых стороны, оставив небольшое отверстие внизу для штуцера наполнения газом, и все готово.
Гелий
Гелий продается в баллонах во многих магазинах товаров для «вечеринок» и предназначен для надувания воздушных шаров. Баллоны по форме напоминают баллоны для пропана. Если в вашем районе нет подобного магазина, поищите поставщика в «Желтых страницах».
Гелий или водород
Когда я начинал проект, то подумывал об использовании водорода вместо гелия, по той причине, что поскольку вес водорода почти в два раза меньше гелия, то можно ожидать увеличения подъемной силы в два раза. Правильная мысль? Ошибка!
Мое предположение о том, что вес водорода почти в два раза меньше веса гелия оказалось правильным (см. табл. 14.1), но я неверно подсчитал подъемную силу, и вот почему. Подъемная сила возникает при замещении объема воздуха водородом или гелием аналогично воздушному пузырьку в воде. Давайте используем эту аналогию. Плотность воздуха меньше плотности окружающей воды, поэтому пузырек выталкивается на поверхность. Аналогично, гелий имеет меньшую плотность, чем окружающий воздух, и поэтому он поднимается вверх. Из табл. 14.1 видно, что поднятие гелия или водорода вверх в толще более плотного газа, т. е. воздуха, определяется их меньшей плотностью.
Таблица 14.1
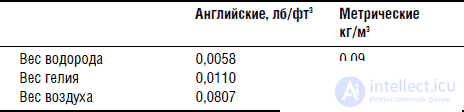
Итак, какова подъемная сила шара с гелием объемом 0,14 куб.м.?
Вес вытесненного воздуха = 0,14 (1,29) = 0,18 кг
Вес 0,14 куб.м. гелия = 0,14 (0,178) = 0,025 кг
Подъемная сила = 0,18 кг – 0,025 кг = 0,155 кг
Подъемная сила достаточно велика! Это произошло потому, что мы не вычли вес самого шара. Допустим, шар весит 0,1 кг, тогда полезная подъемная сила (0,155 кг-0,1 кг) уменьшится до 0,055 кг, или 55 г.
Вес 0,14 куб.м. водорода = 0,14 (0,09) = 0,012 кг
Подъемная сила = 0,18 кг – 0,012 кг = 0,168 кг
Разница подъемной силы для шара объемом 0,14 куб.м. составит:
0,168 кг – 0,155 кг = 0,013 кг, или 13 г.
Разница подъемной силы оказалась очень невелика, поэтому не стоит подвергаться риску, применяя водород. Я бы советовал использовать исключительно гелий.
Размеры дирижабля
Размер куска материала Mylar, который используется для изготовления дирижабля, после сгибания пополам составляет в плоском виде 860х 1422 мм. Вес материала составляет 93 г. Достаточно сложно определить количество гелия, заполняющего дирижабль. Для грубой оценки я буду считать, что дирижабль будет иметь форму цилиндра. Я знаю, что подушка не имеет цилиндрической формы, но, как я уже сказал, это грубая оценка. Сперва найдем диаметр. Кусок материала имеет длину 860х 2, т. е. длина окружности составит 1720 мм. Длина окружности равна радиусу, умноженному на 2п. Вычисляем радиус, который оказывается равным 280 мм. Объем цилиндра равен квадрату радиуса, умноженному на п и на высоту цилиндра. Высота в данном случае равна 1422 мм. Отсюда объем цилиндра будет равен 0,32 куб.м.
Дирижабль не будет заполнен газом до полного объема. В этом случае я буду считать, что заполнение составит 70 % расчетной величины, или около 0,22 куб.м. гелия.
Расчет подъемной силы
Вес вытесненного воздуха = 0,22 (1,29) = 0,29 кг
Вес гелия = 0,22 (0,178) = 0,04 кг
Вес оболочки из материала Mylar = 0,09 кг
Полезная подъемная сила = + 0,29 – 0,04 – 0,09 = 0,16 кг, или 160 г.
Конструкция дирижабля
Конструкция дирижабля проста и не требует особых замечаний. Основной проблемой является надежность сварного шва. Для практики отрежьте от листа материала Mylar небольшую полоску. Согните полоску Mylar блестящей стороной наружу, а темной стороной внутрь. Поставьте регулятор утюга в среднее положение. Регулируя температуру утюга, проглаживайте материал до получения соединения нужного качества. После того как вы изменили температуру утюга, подождите пять минут для стабилизации нагрева. Если температура окажется слишком большой, то материал «потечет» и в нем появятся отверстия. Если температура слишком мала, то сваренные части можно слишком легко разъединить. При правильной температуре сварки для разъединения шва потребуются значительные усилия. Перед тем как пробовать прочность шва, охладите материал Mylar в течение минуты. Найдя правильную установку температуры, запомните ее для использования в дальнейшем.
Мы будем изготавливать дирижабль в форме подушки. Согните лист материала Mylar пополам блестящей стороной наружу. Сварите три открытых стороны, оставив небольшое отверстие для штуцера, заполняющего дирижабль газом, и все готово. Ширина шва должна быть в пределах от 12 до 25 мм.
Видеокамера ПЗС
Видеокамера с ПЗС матрицей обеспечивает передачу изображения с дирижабля (см. рис. 14.3). Естественно, вес принимается во внимание в первую очередь. Камера весит чуть больше 15 г. Размеры камеры составляют 31x31x3 мм. Светочувствительность камеры составляет 0,03 люкс, разрешение 430 телевизионных строк. Выходной сигнал 1 В в системе NTSC. Камера питается от источника постоянного напряжения 9-12 В. Ток, потребляемый камерой, составляет примерно 100 мА.

Рис. 14.3. Легкая ПЗС видеокамера для системы телеслежения
Камеру можно питать от батареи «Крона» напряжением 9 В. Вес батареи (45 г.) в три раза больше веса самой камеры.
Телевизионный передатчик
Существует несколько типов наборов оборудования ТВ передатчика, которые выделяются в два основных класса. Передатчики первого типа транслируют видео– и звуковой сигналы на частоте одного из стандартных телевизионных каналов. Телевизионный приемник принимает сигнал и отображает его на экране. Радиус действия подобной системы составляет порядка 100 метров.
Другой тип передатчиков значительно дороже. Они транслируют сигналы выше частот телевизионного диапазона (частота составляет около 900 МГц), поэтому для просмотра на экране телевизора требуется специальный конвертер. Конвертер принимает сигнал на частоте 900 МГц и понижает ее до частоты стандартного телевизионного диапазона. Такая система отличается большим радиусом действия и лучшим качеством изображения. Блок, использованный в первоначальной версии устройства, передает сигналы непосредственно на телевизионный приемник в диапазоне УКВ (канал 14) (см. рис. 14.4).
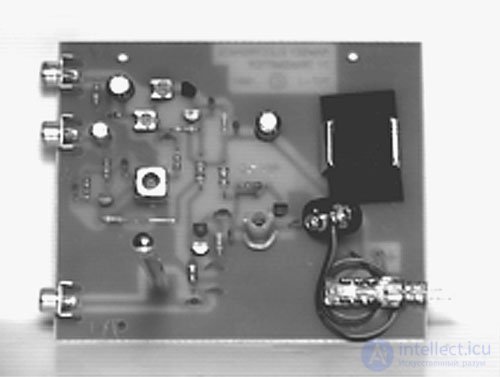
Рис. 14.4. Плата ТВ передатчика
Система радиоуправления
Система радиоуправления специально создана для подобных дирижаблей (см. рис. 14.5). Она имеет исключительно малый вес. Блок движителя представляет собой сдвоенный турбовентилятор, закрепленный к нижней части дирижабля. Каждый вентилятор может вращаться в обоих направлениях и управляется отдельно по двухканальному радиопередатчику.

Рис. 14.5. Легкая система радиоуправления для дроном
Такая конструкция позволяет повысить маневренность дирижабля. Когда один вентилятор толкает дирижабль вперед, а другой – назад, то это позволяет быстро развернуть всю конструкцию. Дирижабль-подушка, готовый к процессу телеслежения, представлен на рис. 14.6. Детальный вид турбовентилятора, миниатюрной ПЗС видеокамеры и телевизионного передатчика показан на рис. 14.7.

Рис. 14.6. Дирижабль-подушка

Рис. 14.7. Детальный вид турбовентилятора, ПЗС видеокамеры и передатчика
Дальнейшие усовершенствования
Дирижабль как он есть представляет собой систему телеслежения. Если снабдить его автономной навигационной системой, то мы превратим дирижабль в летающего робота.
взаимодействие оператора с коптером.
Вот типичная схема взаимодействие оператора с дроном:

вот схема у продвинутых дронов:

Так работают игрушечные дроны, которые управляются со смартфона:

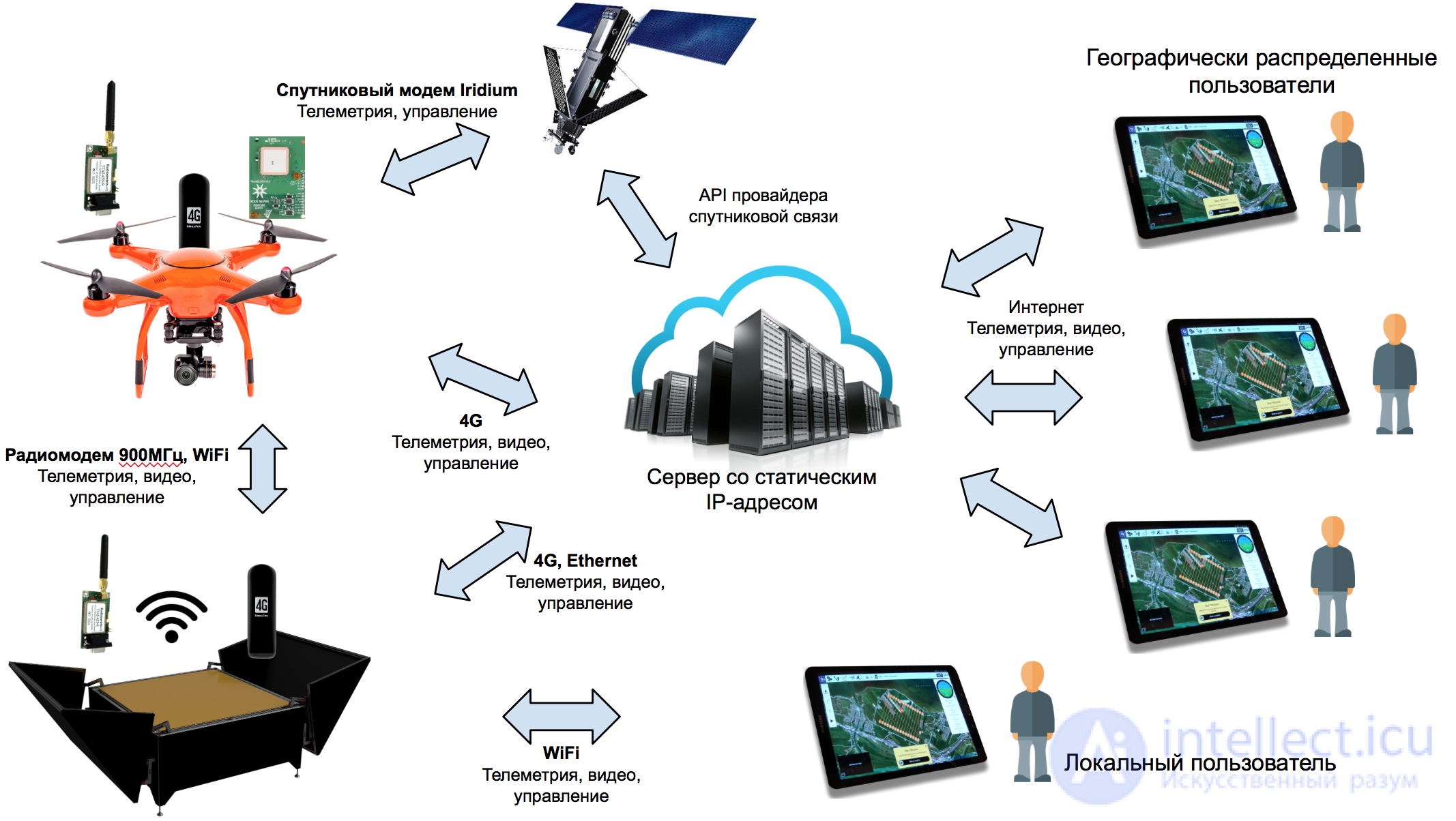
Управлять дроном через интернет можно так (при наличии сим-карты со статическим IP-адресом):

Или так, если IP-адрес динамический:
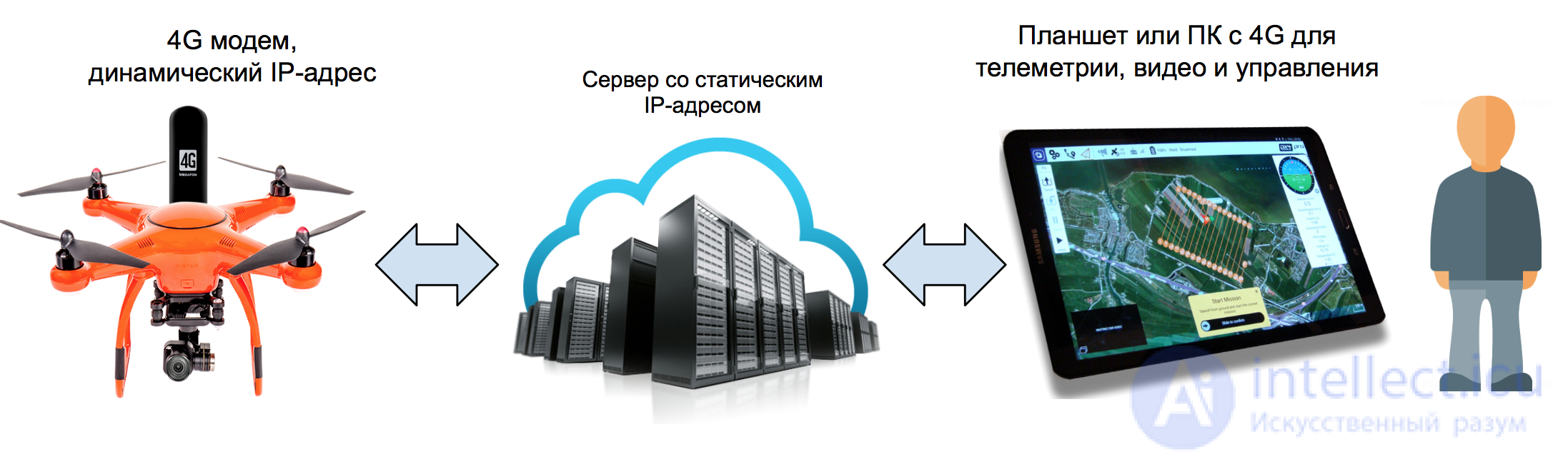
Для надежности и резервирования каналов связи последний вариант можно развить до такого состояния:
Беспилотный летательный аппарат беспилотный летательный аппарат , бла , бпла , беспилотник ,
В общем, мой друг ты одолел чтение этой статьи об аэророботы. Работы впереди у тебя будет много. Смело пиши комментарии, развивайся и счастье окажется в твоих руках. Надеюсь, что теперь ты понял что такое аэророботы, аэроробот, летающий робот и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Ответы на вопросы для самопроверки пишите в комментариях, мы проверим, или же задавайте свой вопрос по данной теме.

Комментарии