Лекция
Сразу хочу сказать, что здесь никакой воды про робототехника основанная на поведении, и только нужная информация. Для того чтобы лучше понимать что такое робототехника основанная на поведении, поведенческая робототехника, тележка брайтенберга , настоятельно рекомендую прочитать все из категории Робототехника.
Робототехника, основанная на поведении ( BBR ), или поведенческая робототехника - это подход в робототехнике, который фокусируется на роботах, которые способны демонстрировать сложное поведение, несмотря на небольшое внутреннее состояние переменных, для моделирования своего непосредственного окружения, в основном постепенно корректируя свои действия через сенсорно-моторные связи.
Робототехника, основанная на поведении, отличается от традиционного искусственного интеллекта, используя в качестве модели биологические системы. Классический искусственный интеллект обычно использует набор шагов для решения проблем, он следует по пути, основанному на внутренних представлениях событий, по сравнению с подходом, основанным на поведении. Робототехника, основанная на поведении, полагается не на заранее заданные расчеты для решения ситуации, а на адаптивность. Этот прогресс позволил робототехнике, основанной на поведении, стать обычным явлением в исследованиях и сборе данных.
Большинство систем, основанных на поведении, также являются реактивными , что означает, что им не нужно программировать внутренние представления о том, как выглядит стул или по какой поверхности движется робот. Вместо этого вся информация собирается со входов датчиков робота. Робот использует эту информацию, чтобы постепенно корректировать свои действия в соответствии с изменениями в окружающей среде.
Роботы, основанные на поведении (BBR), обычно демонстрируют больше биологических действий, чем их аналоги, требующие интенсивных вычислений , которые очень продуманны в своих действиях. BBR часто ошибается, повторяет действия и выглядит сбитым с толку, но также может демонстрировать антропоморфное качество упорства. Из-за этих действий часто сравнивают BBR и насекомых . BBR иногда считают примерами слабого искусственного интеллекта , хотя некоторые утверждают, что они являются моделями всего интеллекта.
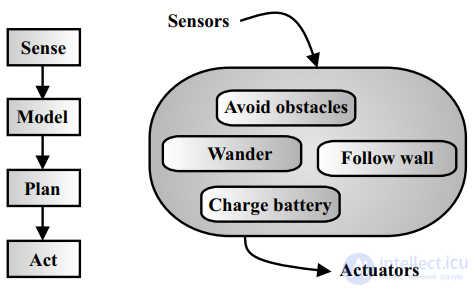
Рисунок 3.1: Сравнение информационного потока в классическом AI (левая часть) и BBR (правая часть).
Для BBR может быть задействовано любое количество вариантов поведения, и на рисунке показаны только пример, включающий четыре поведения.
Как видно из левой части рис. 3.1, классический ИИ сильно ориентирован на рассуждения высокого уровня, то есть на продвинутую когнитивную процедуру, проявляемую у людей и, возможно, некоторых других млекопитающих. Попытка имитировать такие сложные биологические системы оказалась слишком сложной в качестве отправной точки для исследований в области робототехники: классический ИИ имел большой успех во многих подполях, которые он породил (например, распознавание образов, планирование пути и т. Д.), Но сделал небольшой прогресс в достижении цели создания действительно интеллектуальных машин, способных работать автономно. Для всестороннего знакомства с классическим ИИ,
BBR, показанный на правой панели рис. 3.1, представляет собой альтернативу классическому ИИ, в котором интеллектуальное поведение строится по восходящей схеме, начиная с
простое поведение, многие из которых могут выполняться одновременно в заданном
мозг робота, подсказывающий, какие действия должен предпринять робот.
Большинство роботов, основанных на поведении, запрограммированы с базовым набором функций для их запуска. Им дается поведенческий репертуар, позволяющий диктовать, какое поведение использовать и когда, уклонение от препятствий и зарядка аккумулятора могут стать основой, помогающей роботам учиться и добиваться успеха. Об этом говорит сайт https://intellect.icu . Вместо того, чтобы строить модели мира, роботы, основанные на поведении, просто реагируют на свою среду и проблемы в этой среде. Они используют внутренние знания, извлеченные из их прошлого опыта, в сочетании со своим основным поведением для решения проблем.
Школа поведения на основе роботов во многом к работе , проделанной в 1980 - е годы в Массачусетском технологическом институте по Родни Брукс , который вместе со студентами и коллегами построил серию колесных и шагающих роботов , использующих архитектуру категоризации . Статьи Брукса, часто написанные с беззаботными заголовками, такими как « Планирование - это просто способ избежать выяснения того, что делать дальше », антропоморфные качества его роботов и относительно низкая стоимость разработки таких роботов сделали подход, основанный на поведении .
Работа Брукса строится - случайно или случайно - на двух предыдущих этапах подхода, основанного на поведении. В 1950-х годах У. Грей Уолтер , английский ученый, занимающийся неврологическими исследованиями, построил пару роботов на основе вакуумных трубок, которые были выставлены на Фестивале Великобритании в 1951 году и которые имеют простые, но эффективные системы управления, основанные на поведении.
Вторая веха - это книга Валентино Брайтенберга 1984 г. « Транспортные средства - эксперименты в синтетической психологии » (MIT Press). Он описывает серию мысленных экспериментов, демонстрирующих, как простые проводные соединения сенсора / мотора могут приводить к некоторым сложным видам поведения, таким как страх и любовь.
Более поздняя работа в BBR принадлежит сообществу робототехников BEAM , которое основывалось на работе Марка Тилдена . Тильдно было вызвано уменьшением вычислительной мощности , необходимой для ходьбы механизмов из экспериментов Брукс (которые использовали один микроконтроллер для каждой ноги), и дополнительно уменьшить вычислительные требования к тому , что из логических микросхем, транзисторы основанной электроники и аналоговый контур конструкции.
Другое направление развития включает в себя расширение основанной на поведении робототехники на команды с несколькими роботами. Основное внимание в этой работе уделяется разработке простых универсальных механизмов, которые приводят к скоординированному групповому поведению, явному или неявному.
В общем, робота, основанного на поведении, сначала обучают наиболее фундаментальным из всех форм поведения, а именно тем, которые связаны с выживанием. У животных выживание, очевидно, имеет приоритет над любой другой деятельностью: что бы ни делало животное (возможно, человек), оно приостанавливает эту деятельность, если его жизни угрожает опасность.
Что означает выживание в случае с роботом? Чтобы функционировать, робот должен, конечно, быть структурно неповрежденными и иметь ненулевой уровень энергии в своем батареи. Таким образом, примерами поведения, связанного с выживанием, являются предотвращение столкновений и зарядка аккумулятора. Однако еще более важно, особенно для больших роботов, избегать причинения вреда людям. Таким образом, целью предотвращения столкновений часто является защита людей, находящихся рядом с роботом, а не защита самого робота. В самом деле, можно представить себе ситуацию, когда от робота потребуется принести себя в жертву ради защиты человека (в некоторой степени это то, что уже сегодня делают роботы, используемые отрядами бомбардировщиков). Эти идеи были прекрасно резюмированы великим писателем-фантастом Исааком Азимовым в его трех законах робототехники, которые сформулированы следующим образом:
Прежде чем реализовать поведение, необходимо, конечно, выбрать архитектуру поведения, то есть общую структуру для реализации. В отличие от исследователей во многих других областях науки, исследователь робототехники имеет большую свободу в выборе используемых моделей и методов. Это так, поскольку в робототехнике все, что работает (надежно), по определению является правильным. Хотя, например, биологические организмы могут служить источником вдохновения для реализации поведения роботов, нет абсолютно никакой необходимости точно следовать биологии. Такое положение дел иногда является преимуществом, а иногда - нет. Одна проблема заключается в том, что на самом деле не существует единого стандартного метода тестирования, с которым можно было бы сравнить новый метод. Однако на практике количество часто используемых поведенческих архитектур довольно ограничено. Например, в связи с эволюционной робототехникой обычно используется (непрерывное время).
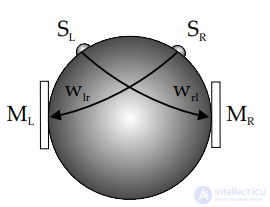
Рисунок 3.2:Автомобиль Брайтенберга оборудован системой элементарного преследования.
искусственные нейронные сети, хотя, безусловно, используются и другие архитектуры. Для поведения, закодированного вручную, то есть поведения, которое полностью определяется вручную, нейронные сети используются редко просто потому, что их очень сложно создать вручную в силу распределенного характера вычислений. Вместо этого используются другие архитектуры, и здесь архитектуры, основанные на простых правилах if-then-else в сочетании с логическими переменными состояния, будут считается. Эта архитектура особенно подходит для кодирования вручную поведения, а также может быть представлена в виде конечных автоматов. Однако сначала мы кратко обсудим поведение, реализованное в виде очень простых нейронных сетей.
Даже очень простые сети могут заставить робота демонстрировать некоторую форму базового интеллектуального поведения. Это отметил, в частности, Валентино Брайтенберг. Он неформально описал, как можно постепенно создавать разумных искусственных существ, начиная с очень простых. Термин «транспортное средство Брайтенберга» будет использоваться здесь для обозначения искусственного существа с прямым отображением датчика и исполнительного механизма, хотя Брайтенберг действительно описал гораздо более сложные существа с памятью, формой, распознаванием образов и т. Д.
В качестве примера рассмотрим существо с двумя датчиками света (например, инфракрасным), расположенными в направлении его движения, и двумя исполнительными механизмами (например, колесами), по одному с каждой стороны его тела. Если датчики подключены к исполнительным механизмам, как показано на рис. 3.2, существо будет преследователем, то есть будет стремиться двигаться к обнаруженному объекту, поскольку левый датчик (SL) активирует двигатель (MR), управляющий правое колесо.
Используя уравнения для дифференциально управляемого робота и пренебрегая моделью двигателя (т.е. предполагая, что крутящие моменты, создаваемые мозгом робота, прикладываются непосредственно к осям колес), уравнения уравнения движения могут быть записаны

где wlr и wrl - (положительные) веса, соединяющие датчики с двигателями. Способность этого робота преследовать цель, мягко говоря, ограничена и зависит от значений весов соединений. Если соединительные грузы сделать слишком большими, робот будет вращаться, а если веса будут слишком маленькими, ему будет трудно повернуться.
Тем не менее, при правильном выборе весов связи простого преследователя можно создать, используя всего два нейрона. Строго говоря, соединения между датчиками и исполнительными механизмами - это вовсе не нейроны, а элементы ввода, поскольку они только передают сигналы со входа и, таким образом, не выполняют никаких вычислений.
В только что описанном случае обучение нейронной сети было бы очень простым: оно сводилось бы к установке значений только двух весов. Однако обычно нейронные сети, используемые для управления роботами, намного сложнее и часто повторяются. Как упоминалось выше, такие сети очень сложно создать вручную, и вместо этого они чаще всего используются в связи с искусственной эволюцией, тема, которая будет рассмотрена в следующей главе
А как ты думаешь, при улучшении робототехника основанная на поведении, будет лучше нам? Надеюсь, что теперь ты понял что такое робототехника основанная на поведении, поведенческая робототехника, тележка брайтенберга и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Комментарии
Оставить комментарий
Робототехника
Термины: Робототехника