Лекция
Привет, сегодня поговорим про кисть руки – андроида, обещаю рассказать все что знаю. Для того чтобы лучше понимать что такое кисть руки – андроида , настоятельно рекомендую прочитать все из категории Робототехника.
В этой главе мы попробуем изготовить андроидную или человекоподобную кисть руки. Для приведения в движение пальцев этой руки мы будем использовать воздушные мышцы, описанные в гл. 3.
Воздушная мышца представляет собой пневматическое устройство, способное линейно сокращаться при подаче сжатого воздуха. При активации эта мышца сокращается подобно живой биологической мышце. Вы можете подумать, что эту работу могут с успехом выполнять пневматические цилиндры, которые в настоящее время находят широкое применение. Это действительно так, однако воздушные мышцы в определенном смысле являются находкой и благом для конструкторов-любителей и создателей роботов, поскольку ее стоимость намного ниже, она имеет исключительно малый вес, гибкость и проста в применении.
Воздушная мышца имеет отношение развиваемой мощности к собственному весу около 400:1. Поскольку большинство частей мышцы изготовлены из резины или пластика, она способна работать во влажных условиях или даже под водой. Воздушная мышца представляет собой гибкую конструкцию, что позволяет использовать ее для соединения и сжатия соосных или несоосных блоков и рычагов. Воздушная мышца способна к сокращению, даже если ее перегнуть вдоль искривленной поверхности. Простота использования мышцы делает ее предпочтительнее обычных пневматических цилиндров в ряде экспериментов.
Безусловно, как и для любого пневматического устройства, для работы мышцы требуется сжатый воздух. Сжатый воздух не столь доступен, как электрический ток. Когда я впервые решил попробовать сделать воздушную мышцу, я думал, что создание небольшого устройства, вырабатывающего сжатый воздух, может оказаться проблемой. Как оказалось, я ошибался. Простую воздушную систему можно сделать, потратив всего лишь $25,00, а небольшая электрическая пневмосистема обойдется в $50,00.
При использовании электричества для сжатия воздуха суммарный КПД устройства падает. Однако воздушная мышца потребляет для работы очень небольшое количество воздуха, поэтому можно создать резервуар для его хранения. Мышца очень быстро реагирует на подачу воздуха и имеет короткий рабочий цикл. Небольшая мышца весом всего 10 г способна поднять вес около 6,5 кг.
Перед тем как мы начнем делать андроидную руку, мы сперва изготовим несколько демонстрационных устройств с ручным управлением, использующих воздушную мышцу. Демонстрационные устройства позволят нам подробнее познакомиться с устройством и работой воздушной мышцы, прежде чем мы примемся за более сложный проект.
Если в устройстве используются одна или две мышцы, то они могут легко управляться «вручную». Если имеется пять или шесть воздушных мышц, то для их последовательной или одновременной активации управление «вручную» становится затруднительным. В этом случае мы применяем компьютерное управление. Можно использовать компьютер IBM PC или подходящий PIC микроконтроллер. Схема интерфейса для любого компьютера сохраняется неизменной. В этой главе мы будем использовать IBM PC. Управление воздушной мышцей с помощью компьютера (порт принтера IBM или совместимый) через параллельный порт PC добавит примерно $25,00 к стоимости конструкции воздушной мышцы.
Преимущества воздушной мышцы
• Малый вес. Воздушная мышца длиной 150 мм с подводящей воздушной трубкой диаметром 4 мм и длиной 450 мм весит приблизительно 10 г.
• Сокращение. Воздушная мышца длиной 150 мм сокращается примерно на 25 мм (около 25 % без учета длины креплений).
• Мощность. Развивает силу порядка 200 г при давлении воздуха 3 кгс. Отношение развиваемой мощности к весу может достигать 400:1.
• Гибкость. Мягкая и гибкая конструкция, которая может быть изогнута вдоль искривленной поверхности без нарушения ее работоспособности.
Применение
Сама конструкция воздушной мышцы делает ее особенно пригодной к использованию в робототехнике и системах автоматизированных движений. В некоторых случаях ими можно заменить сервомоторы или двигатели постоянного тока. Их уникальные свойства – незначительный вес, мощность и гибкость – могут быть комплексно использованы во многих приложениях и применяться для улучшения характеристик существующих пневматических устройств. Одном словом, воздушные мышцы могут быть использованы во многих устройствах, в которых требуются линейные и сократительные движения. Во многих случаях ими можно с успехом заменять пневматические цилиндры.
Как работает воздушная мышца
Воздушная мышца представляет собой длинную трубку, выполненную в виде черного пластикового рукава. Внутрь рукава помещена трубка из мягкой резины. К каждому концу прикреплены металлические зажимы. Каждый конец пластикового рукава свернут в петлю, сложен вдвое и скреплен с помощью металлического зажима. Эти петли используются для крепления воздушной мышцы к другим частям устройства.
При подаче воздуха под давлением мышца сокращается следующим образом. Когда во внутреннюю мягкую резиновую трубку подается сжатый воздух, то она расширяется. Внутренняя трубка оказывает давление на внешний черный пластиковый рукав, что также приводит к его расширению. Когда пластиковый рукав расширяется, то он укорачивается в длину пропорционально увеличению его диаметра. Это приводит к сокращению конструкции воздушной мышцы. Однако важным является то, что для правильной работы мышцы она должна находиться в растянутом положении, когда она не активирована. В противном случае при активации мышцы мы не получим ее сокращения (см. рис. 16.1).
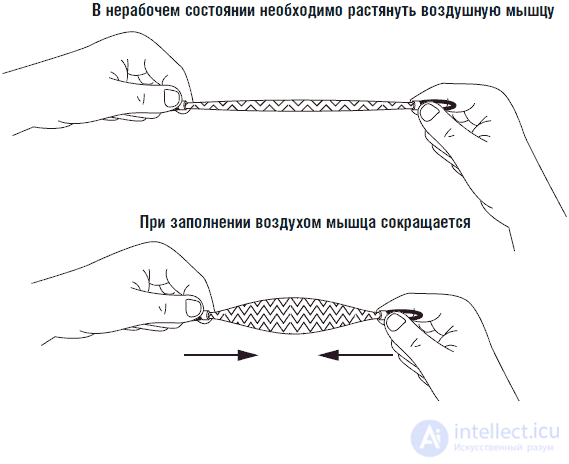
Рис. 16.1 Принцип работы воздушной мышцы
Детали системы воздушной мышцы
На рис. 16.2 приведены рисунки деталей, необходимых для создания воздушной мышцы. Деталь 1 – это собственно воздушная мышца (что очевидно). Деталь 2 – воздушный клапан на три положения. Трехпозиционный воздушный клапан позволяет управлять работой мышцы вручную (см. рис. 16.3).
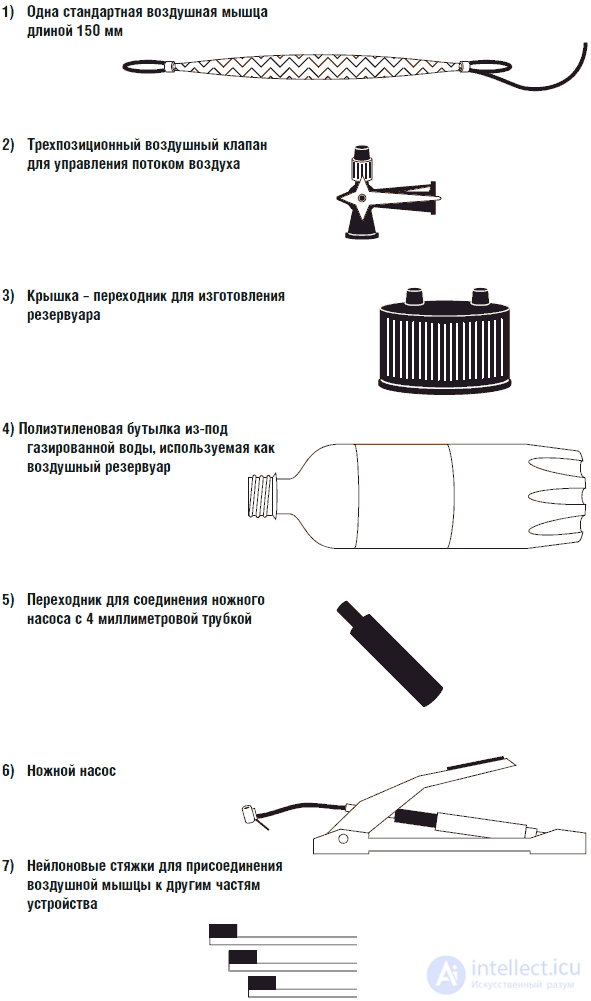
Рис. 16.2. Необходимые части для экспериментов с воздушной мышцей
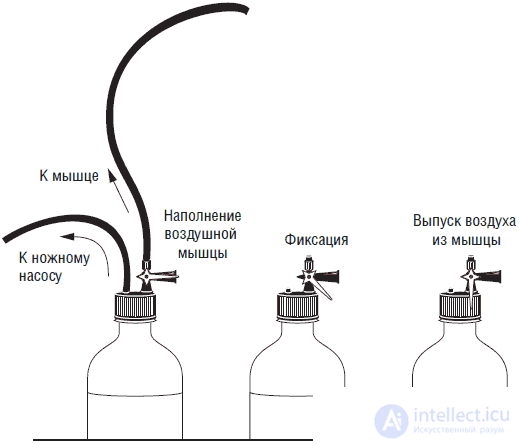
Рис. 16.3. Трехпозиционный воздушный клапан для управления воздушной мышцей
Деталь 3 – переходник крышки бутылки с предохранительным клапаном (клапан открывается при давлении более 4,2 кгс). Переходник крышки бутылки позволяет использовать стандартные полиэтиленовые бутылки из-под газированной воды в качестве воздушных резервуаров. Предохранительный клапан автоматически стравливает избыточный воздух, когда давление превышает заданный предел.
Деталь 4 – полиэтиленовая бутылка из-под газированной воды, используемая в качестве воздушного резервуара. Пластиковая бутылка легко выдерживает давление 3,5 кгс. Я проверял подобные бутылки из-под газированной воды статическим давлением до 7 кгс.Предупреждение: Ни в коем случае не используйте в качестве воздушного резервуара стеклянные бутылки. Небольшая трещина в бутылке или ее случайное падение могут привести к взрыву бутылки, сопровождающемуся разлетом стеклянных осколков. Перекачка пластиковой бутылки может привести только к ее раздуванию.
Деталь 5 – переходник ножного насоса, а деталь 6 – собственно воздушный насос. Обычный ножной насос с манометром способен создать давление в бутылке до 7 кгс. Из-за малой емкости пластиковых бутылок давление в 3,5 кгс достигается в них после четырех «качков» ножного насоса. Воздушная мышца использует очень небольшое количество воздуха, поэтому в небольшой полиэтиленовой бутылке содержится достаточно воздуха для четырех или пяти полных циклов работы. Деталь 7 представляет собой нейлоновые кабельные стяжки, которые используются для быстрого привязывания воздушной мышцы к другим механическим деталям.
На рис. 16.4 показан общий вид всей системы в сборе. В некоторых случаях вам придется воспользоваться эпоксидным клеем для склейки некоторых деталей для предотвращения их «выскакивания» под давлением. Например, если вы собираетесь использовать трехпозиционный воздушный клапан для экспериментов с воздушной мышцей исключительно совместно с переходником крышки бутылки, то можете постоянно вклеить клапан в переходник.
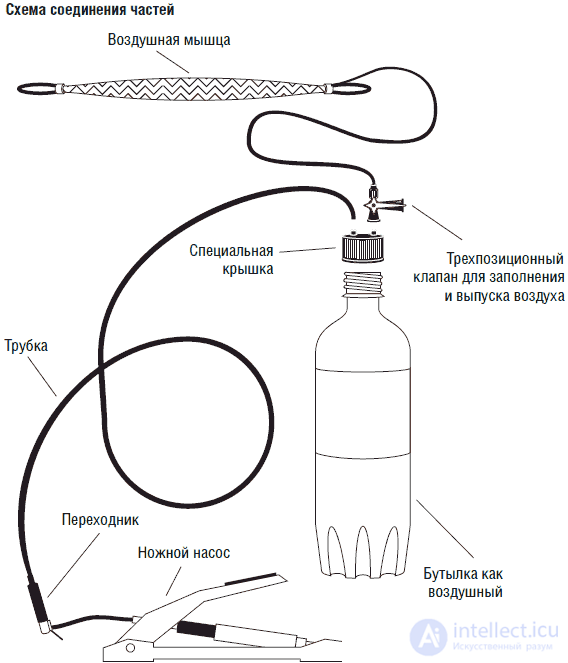
Рис. 16.4. Общая схема соединения частей установки
Крепление воздушной мышцы к другим механизмам
Воздушная мышца изготовлена из мягкой внутренней трубки, заключенной в прочный пластиковый рукав. Конструкция скреплена металлическими зажимами с каждой стороны. Концы пластикового рукава согнуты в петлю, имеющую отверстие. Петля с отверстием обладает большой механической прочностью и может быть использована для соединения воздушной мышцы с другими механизмами. На рис. 16.5 изображен винт, вставленный в отверстие петли.

Рис. 16.5. Винт проходит через одну из петель воздушной мышцы
Использование переходника воздушного насоса
Приобретенный вами воздушный насос имеет стандартный носик (сопло), как показано на рис. Об этом говорит сайт https://intellect.icu . 16.6. Нам будет необходимо заменить стандартный носик специальным переходником. Поднимите запирающий рычажок, как показано на рис. 16.7. Удалите стандартный носик (см. рис. 16.8) и вставьте воздушный переходник (см. рис. 16.9). Закройте запирающий рычажок, нажав на него вниз.
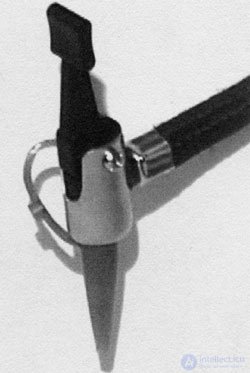
Рис. 16.6. Сопло ножного насоса

Рис. 16.7. Поднимите запирающий рычажок (над соплом ножного насоса)

Рис. 16.8. Удалите стандартное сопло-переходник

Рис. 16.9. Вставьте переходник в ножной насос
У вас Кока Кола или Пепси Кола?
Вам нужно будет достать пластиковую полиэтиленовую бутылку. Простейший способ – купить бутылку газированной воды. Убедитесь, что бутылка сделана именно из пластика. Не покупайте бутылку объемом более 1 литра. Идеальной является бутылка 0,5 литра. Я пробовал навинчивать переходник на бутылки разных емкостей вплоть до 2 литров, и он подошел ко всем.
Используйте содержимое бутылки, а затем вымойте бутылку теплой водой. Перед использованием бутылка должна быть совершенно сухой. Интересен тот факт, что если случайно уронить полную бутылку с газированной водой, то результирующее давление углекислого газа, высвобожденного из карбоната натрия, значительно превысит 3,5 кгс – предел, установленный нами для подобных бутылок. Компании по производству газированных напитков изготовляют полиэтиленовые бутылки с таким расчетом, чтобы они выдерживали быстрое повышение давления газа, возникающее при случайном падении бутылки. Я не осознавал этого факта до того, как начал работать с воздушными мышцами, и думаю, что так бы и не узнал. Помните, что в конструкции воздушных мышц нельзя использовать стеклянные бутылки.
Изготовление первого демонстрационного устройства
Первое демонстрационное устройство, которое мы собираемся сделать, очень просто по конструкции и может быть использовано для измерения степени сокращения воздушной мышцы (см. рис. 16.10). Основание представляет собой дощечку толщиной 25х 50х 275 мм. Я использовал подобный материал, поскольку его можно найти повсюду. С тем же успехом вы можете использовать металл или пластик. На каждом из концов я просверлил отверстие под винты 3 миллиметров длиной 45 мм. Винты вставлены в отверстие и закреплены с помощью двух 3 мм гаек, по одной с каждой стороны дощечки. Головка винта и часть резьбы выступают над дощечкой примерно на 20 мм.

Рис. 16.10. Первая демонстрационная модель
Перед установкой головку верхнего винта необходимо продеть в отверстие верхней петли воздушной мышцы. В отверстие нижней петли воздушной мышцы продевается отрезок резиновой ленты, который затем закрепляется на нижнем винте. В свободном состоянии мышцы резиновая лента должна ее растягивать.
Произведите необходимые соединения деталей, как это показано на рис. 16.4. В некоторых случаях у меня возникали трудности при надевании трубки диаметром 4 мм на патрубки. Здесь существует несколько хитростей. Во-первых, если трубка не хочет надеваться на переходник, то можно поместить ее под струю горячей воды из водопроводного крана. Это размягчит пластик и позволит выполнить операцию. Можно также воспользоваться отрезком прозрачной пластиковой медицинской трубки. Пластиковая трубка достаточно плотно надевается на патрубки переходников (см. рис. 16.11). С другой стороны, она является достаточно растяжимой, чтобы в нее можно было вставить трубку диаметром 4 мм (см. рис. 16.12). Отрезок мягкой трубки выполняет роль переходника и легко может быть расцеплен при смене устройств, использующих воздушные мышцы.

Рис. 16.11. Использование прозрачной медицинской трубки со стандартными переходниками

Рис. 16.12. Соединение прозрачной трубки и трубки 4 мм
Чтобы устройство заработало, сперва создайте избыточное давление с помощью ножного насоса. Чтобы поднять давление до 3,5 кгс, достаточно четырех нажатий. Время работы с насосом зависит от емкости используемой полиэтиленовой бутылки.
Откройте трехпозиционный клапан для заполнения мышцы воздухом. Мышца немедленно сократится. Вы можете определить отношение сокращения мышцы в зависимости от величины подаваемого избыточного давления. Вы сможете совершить четыре или пять полных циклов сокращения – расслабления мышцы, прежде чем вам снова потребуется наполнить бутылку воздухом. Действительно, мышца при работе потребляет очень небольшое количество воздуха.
Обратите внимание, что воздушная мышца остается в сокращенном состоянии до тех пор, пока кран воздушного клапана не повернут для выпуска воздуха. Для поддержания мышцы в сокращенном состоянии не требуется энергия. В противоположность этому для обеспечения втягивания или вытягивания соленоида и позиционирования сервомотора они должны постоянно снабжаться электрической энергией.
Если мышца не сокращается, то она, возможно, не была достаточно растянута в исходном состоянии. Помните, что нормальная работа воздушной мышцы обеспечивается только при ее предварительном растяжении.
Изготовление второго демонстрационного устройства
Вторая модель представляет собой рычаг (см. рис. 16.13 и 16.14). Я изготовил модель рычага из дерева и пластика. Воздушная мышца и резиновая лента прикреплены к рычагу с помощью винтов. В точке опоры рычаг закреплен на деревянном штифте. На втором деревянном штифте крепятся воздушная мышца и резиновая лента. Устройство работает при помощи трехпозиционного клапана, о чем я уже рассказывал выше. При подаче воздуха рычаг поднимается вверх.
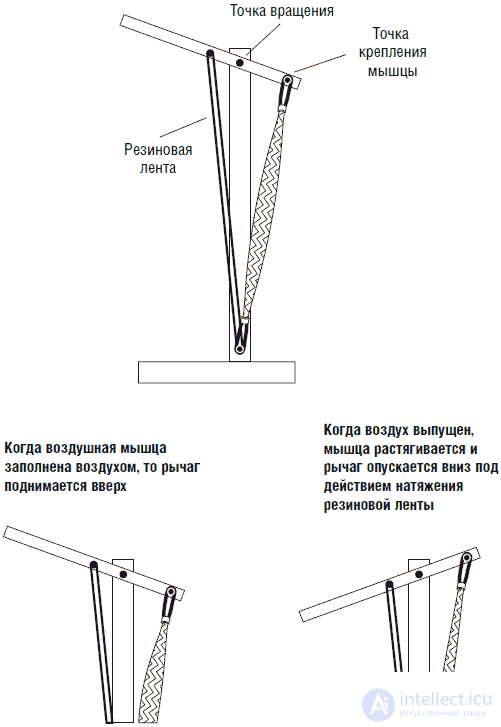
Рис. 16.13. Вторая демонстрационная модель «рычаг»
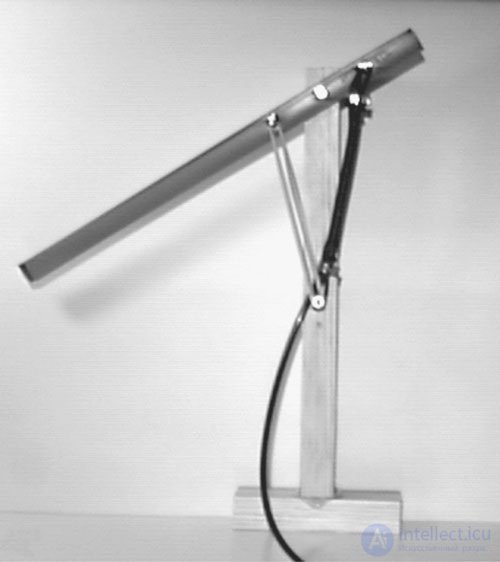
Рис. 16.14. Вторая демонстрационная модель «рычаг»
IBM интерфейс
Управление с помощью компьютера очень просто. Компьютер управляет электрическим трехпозиционным клапаном. Недорогие трехпозиционные, управляемые с помощью электрического соленоида воздушные клапаны имеются в продаже (см. рис. 16.15). Воздушный клапан управляется постоянным напряжением 5 В и рассчитан на давление до 6,3 кгс. Воздушный клапан имеет легко присоединяемые и разъединяемые воздушные «разъемы». Трубка диаметром 4 мм легко входит в отверстие клапана и там надежно фиксируется. Для отсоединения трубки необходимо нажать пальцами на кольцо вокруг отверстия клапана, а затем вынуть трубку диаметром 4 мм.
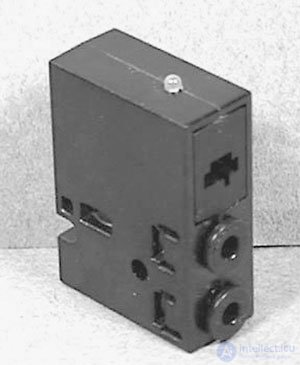
Рис. 16.15. Электрический трехпозиционный воздушный клапан
Для управления одним воздушным клапаном достаточно задействовать один вывод на разъеме параллельного порта (порт принтера) и вывод земли (см. рис. 16.16). Вывод подключается через логический элемент – неинвертированную буферную схему на ИС 4050HCT. Выход буфера управляет транзисторным ключом на транзисторе TIP 120 NPN Darlington. Транзистор управляет током, протекающим через воздушный клапан.
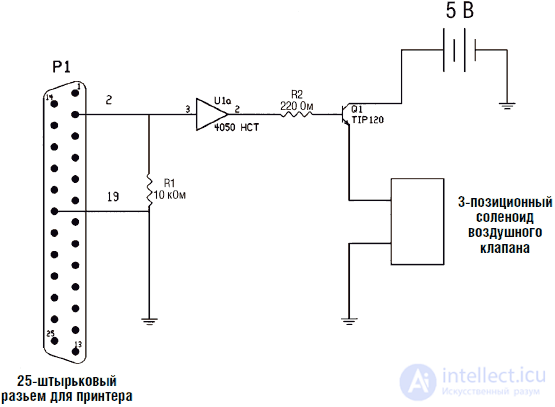
Рис. 16.16. Принципиальная схема контроллера воздушного клапана
Программа на BASIC
Программа на BASIC очень проста. После нахождения адреса порта прин тера, программа управляет работой воздушного клапана через вывод 2.
5 REM Контроллер соленоида воздушного клапана
10 REM Джон Иовин
15 REM Найти адрес порта принтера
20 DEF SEG = 0
25 a = (PEEK(1032) + 256 * PEEK(1033))
30 REM Следующая строка включает воздушную мышцу
35OUT a ,1
40 REM Следующая строка выключает воздушную мышцу
45 OUT a , 0
При высоком уровне сигнала на выводе 2 DB 25 воздушный клапан открывается и подается воздух в воздушную мышцу. При низком уровне сигнала на выводе 2 нагнетание воздуха в воздушную мышцу прекращается, и клапан выпускает воздух из мышцы.
Другие источники воздуха
I В воздушной мышце, которую мы описывали, в качестве источника сжа
того воздуха использовался ножной насос и пластиковая бутылка в качестве воздушного резервуара. Понятно, что можно использовать сжатый воздух из любого доступного источника. Например, вы можете приобрести небольшие баллончики со сжатым воздухом, используемые в краскораспылителях. Небольшие трубки и фитинги, имеющиеся в комплектах таких распылителей, помогут вам в ваших экспериментах.
На рынке имеются несколько моделей небольших электрических воздушных компрессоров. Более дорогие модели, используемые в краскораспылителях, имеют металлические резервуары для хранения воздуха и регуляторы давления. На другом конце ценовой шкалы находятся дешевые портативные воздушные компрессоры, работающие от 12 В постоянного тока и используемые для накачки шин. В таких компрессорах, как правило, нет воздушного резервуара и регулятора давления. Подобные компрессоры можно приобрести для того, чтобы создать недорогую пневматическую систему.
Для систем автоматических воздушных компрессоров никогда не используйте пластиковые бутылки. Такие бутылки можно использовать для хранения воздуха исключительно в системах ручных (или ножных) компрессоров (насосов). В автоматических системах сжатия воздуха используйте только специальные емкости, предназначенные для хранения сжатого воздуха. Небольшие емкости стоят достаточно недорого.
Безопасность прежде всего
Пневматические системы используются в быту относительно редко, поэтому лишь немногие умеют правильно обращаться с подобными устройствами. По этой причине при работе с пневматическими системами необходимо придерживаться некоторых правил техники безопасности.
При испытании нового устройства всегда носите защитные очки.
Не присоединяйте пластиковую бутылку к автоматическому компрессору.
Ни в коем случае не используйте для хранения воздуха стеклянные бутылки.
Не используйте в качестве резервуаров бутылки объемом более 1 литра.
Не отворачивайте крышку бутылки, не вынимайте клапан и не снимайте трубки с патрубков, когда система находится под давлением. Перед выполнением этих операций обязательно спустите давление в системе.
Кисть руки андроида
Конструирование механизма захвата, напоминающего кисть руки человека, начинается с визита в магазин игрушек. Нам потребуется игрушка под названием Awesome Arm, выпускаемая китайской компанией Zima (см. рис. 16.17). Для того чтобы вам хватило «пальцев», необходимо купить две такие игрушки. Большой палец игрушки имеет фиксированное положение, и его нельзя использовать.
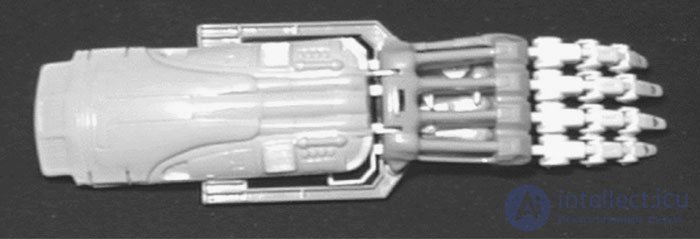
Рис. 16.17. Механическая рука Awesome компании Zima
Игрушка работает следующим образом: «пальцы» игрушки приводятся в действие пальцами оператора, т. е. игрушка представляет собой род дистанционного манипулятора. Чтобы сделать андроидную кисть руки, нам придется разобрать игрушки и удалить из них большинство деталей.
Когда вы перевернете руку, то вы увидите пять небольших винтов, которые скрепляют конструкцию. Отверните эти винты, и конструкция распадется на части (см. рис. 16.18). Вытащите «пальцевую» часть игрушки (см. рис. 16.19). Остальные части игрушки нам не потребуются. На конце стерженьков, которые управляют «пальцами», находятся «колечки», куда оператор вставляет пальцы при управлении игрушкой. Нам эти колечки не понадобятся, поэтому необходимо удалить их с помощью кусачек, оставив длинный пластиковый стержень.
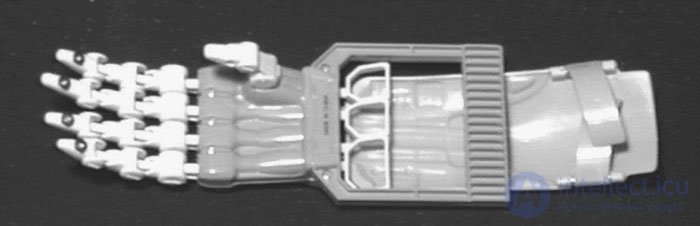
Рис. 16.18. Обратная сторона руки, где необходимо вывернуть крепежные винты

Рис. 16.19. Пальцы с тягами, извлеченные из руки
Детали конструкции собраны на плате. Я начал с того, что обвел контуры кисти моей правой руки на бумаге. Затем я зачернил некоторую внутреннюю часть рисунка (см. рис. 16.20). По контурам зачерненного рисунка я вырезал пластину из алюминия толщиной 3 мм.
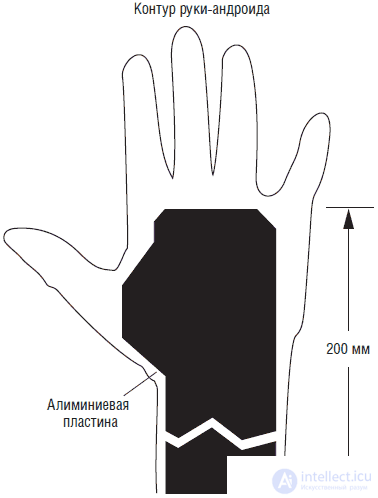
Рис. 16.20. Контур кисти руки и положение алюминиевого основания
Пальцы крепятся к концу платы. Сперва отметьте положение крепления пальцев на плате. Затем поместите небольшую алюминиевую пластину шириной 12 мм и толщиной 3 мм сразу за пластиковым креплением пальцев (см. рис. 16.21). Эта пластина представляет собой задний упор для крепления пальцев. Просверлите три отверстия сквозь пластинку и основание и прикрепите пластинку к основанию с помощью винтов и гаек. Укрепите алюминиевую пластинку 3x12 мм поверх пластикового основания крепления пальцев. Просверлите четыре отверстия в пластинке и плате, как это показано на рис. 16.22. Конструкция скрепляется с помощью винтов, длиной 25 мм и гаек. Эти винты имеют двойное назначение. Во-первых, они крепят основание пальцев и удерживают пальцы в конструкции. Во-вторых, к ним будет крепиться резиновая лента, обеспечивающая растяжение воздушных мышц.
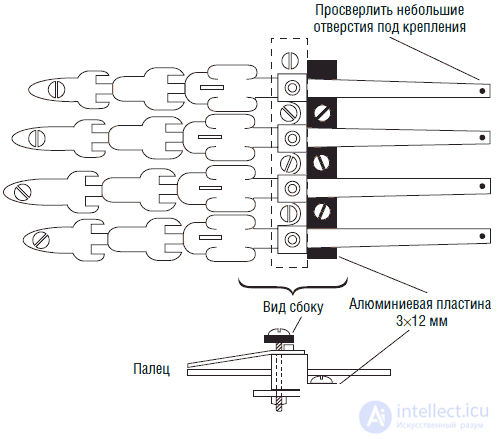
Рис. 16.21. Крепление задней пластинки
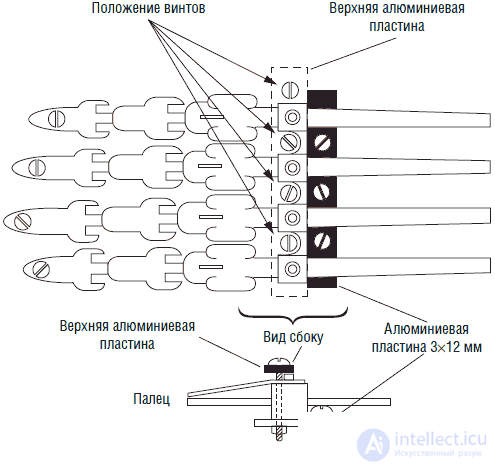
Рис. 16.22. Крепление верхней пластинки
После того как пальцы закреплены на плате, нам необходимо прикрепить к каждому пальцу воздушную мышцу. Напомню, что для правильного сокращения воздушной мышцы она должна быть предварительно растянута. Проденьте резиновую петлю через конец воздушной мышцы. Затем отверните и выньте первый из четырех винтов длиной 25 мм, которые крепят основание пальцев. Просуньте сложенные концы резиновой петли в то место, где винт проходит через верхнюю пластинку. Вставьте винт на место, продев через него концы резиновой петли, и затем затяните с помощью гайки (см. рис. 16.23 и 16.24).
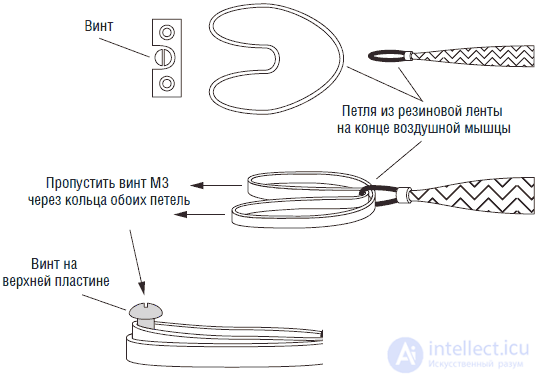
Рис. 16.23. Продеть сложенную резиновую ленту через один конец воздушной мышцы и закрепить концы ленты на винте крепления верхней пластинки
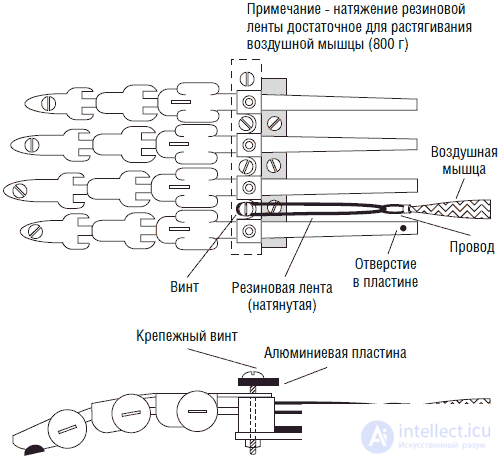
Рис. 16.24. Общий вид крепления воздушной мышцы к тяге пальца
Потяните воздушную мышцу за другой конец до того, как она будет полностью растянута. Заметьте положение конца воздушной мышцы. В этом месте просверлите отверстие в плате и вставьте туда винт, закрепленный с помощью гаек. Для поддержания воздушной мышцы в растянутом состоянии наденьте конечную петлю воздушной мышцы на винт (см. рис. 16.25).
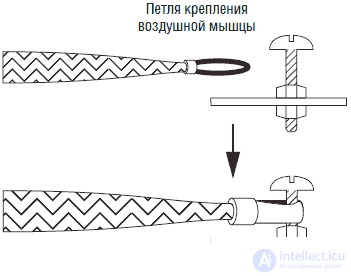
Рис. 16.25. Крепление заднего конца воздушной мышцы к крепежному винту для ее растяжки
Теперь просверлите небольшое отверстие в пластиковой части тяги пальца. Положение отверстия должно соответствовать положению передней петли крепления воздушной мышцы. Отверстие должно быть достаточно велико, чтобы в него проходил сложенный вдвое многожильный провод. Можно использовать оголенный одножильный медный провод 0,6 мм или многожильный стальной. Пропустите сложенный вдвое многожильный провод через отверстие в пластике и через отверстие петли переднего крепления мышцы. Скрепите детали путем скручивания концов провода. Если концы скрученного провода окажутся слишком длинными, то удалите излишки с помощью кусачек.
Примерный вид сверху показан на рис. 16.24. Теперь мы можем увидеть, каким образом будут сокращаться пальцы. Пальцы сокращаются при подаче сжатого воздуха в воздушную мышцу. Сократившаяся мышца воздействует на пластиковую тягу, управляющую пальцем, что в свою очередь вызывает его сокращение. Когда с воздушной мышцы снимается давление, то резиновая лента растягивает ее в первоначальное положение.
Теперь неплохо провести статическое испытание работы пальца. Соедините подачу воздуха с воздушной мышцей, чтобы убедиться в работоспособности устройства. В начальном варианте устройства для полного сгибания указательного пальца требовалось давление порядка 3 кгс.
Когда вы убедитесь, что палец работает правильно, присоедините воздушные мышцы к остальным пальцам таким же образом. На рис. 16.26 показан детальный вид воздушных мышц, соединенных с тягами соответствующих пальцев.
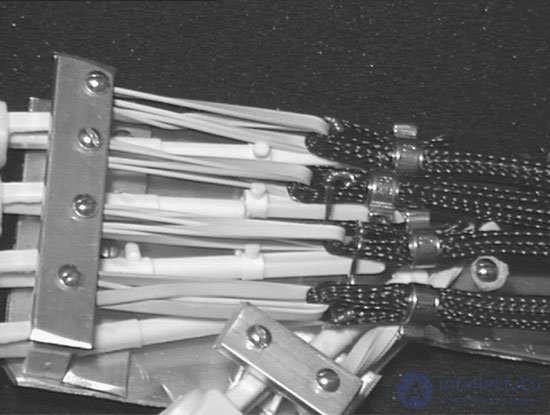
Рис. 16.26. Детальный вид воздушных мышц, резиновых лент и пальцевых тяг в сборе
Большой палец
Большой палец является самым важным при работе кисти. С его помощью сильно облегчается захват, удерживание и использование различных предметов. Вы так не думаете? Попробуйте тогда поднять с пола или со стола монету без помощи большого пальца. А теперь попробуйте поработать с плоскогубцами, кусачками, молотком или дрелью.
Для изготовления большого пальца воспользуйтесь мизинцем из набора второй купленной игрушки. Закрепите этот палец ниже под углом 45° по отношению к другим пальцам (см. рис. 16.27).
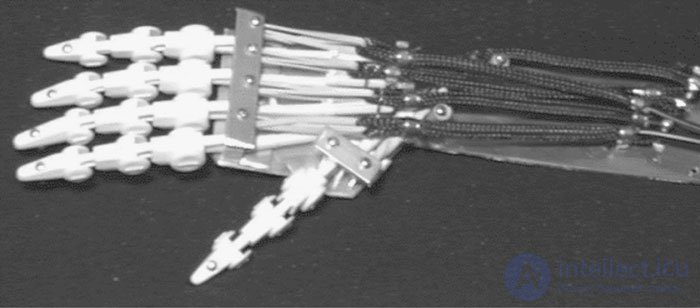
Рис. 16.27. Вид кисти-робота в сборе
В первоначальной конструкции большой палец сгибается в сочленениях (двигается), но не может совершать движений навстречу другим пальцам. Конструкцию можно улучшить, обеспечив встречное движение большого пальца, что увеличит эффективность работы руки. Чтобы обеспечить встречное движение пальца, необходимо отрезать «место» большого пальца на плате и заменить его шарнирным соединением на пружине (см. рис. 16.28). Подпружиненный шарнир может быть расположен на прямоугольной коробочке, показанной на рис. 16.28. Воздушная мышца присоединяется к этой секции: когда мышца активируется, то она тянет большой палец в сторону ладонной части кисти. Таким образом, обеспечивается как сгибательное, так и встречное движение большого пальца.
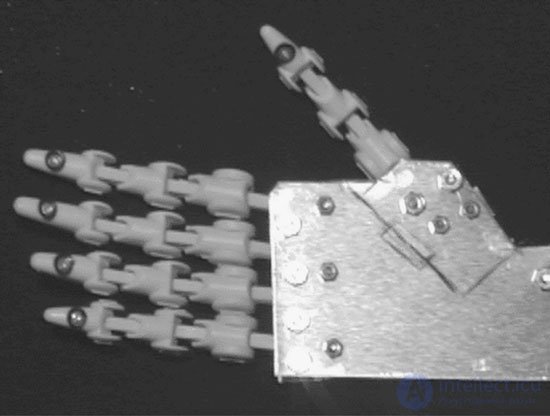
Рис. 16.28. Вариант крепления большого пальца для обеспечения сгибательного и встречного движения
Дальнейшее усовершенствование
Возможно создание устройства интерфейса между кистью руки робота и IBM-совместимым компьютером, в котором используются пять электрических воздушных клапанов, аналогичное устройству с одним клапаном, описанному выше. Чтобы превратить кисть робота в кисть – андроида, можно надеть на кисть сверху соответствующий чехол (см. рис. 16.29).
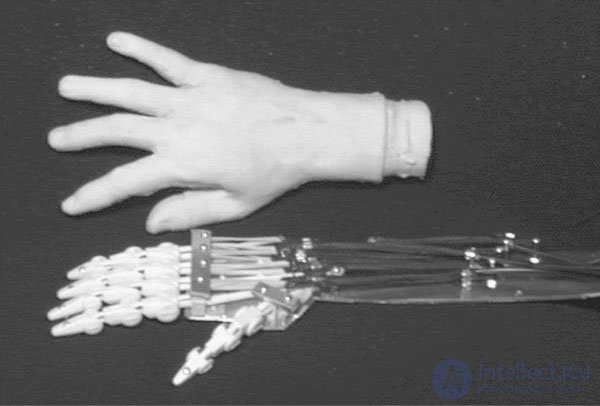
Рис. 16.29. Резиновая перчатка подходящей формы и размера для превращения руки-робота в «андроидную» руку
Отметим еще несколько интересных применений воздушной мышцы:
• Шестиногий робот-ходок
• Зажим для быстрого открывания банок (для людей, страдающих артритом)
• Кисть-робот
• Рука-робот
Список деталей для воздушной мышцы
• (1) Воздушная мышца, длина 150 мм с подводящей трубкой 4 мм
• (1) Крышка полиэтиленовой бутылки с предохранительным клапаном
• (1) Трехпозиционный воздушный клапан
• (1) Переходник для воздушного насоса
• (1) Ножной воздушный насос с максимальным давлением до 7 кгс
• (1) воздушная трубка диаметром 4 мм
• (1) медицинская прозрачная трубка (для быстрой разборки)
Список деталей для интерфейса IBM
• (1) Трехпозиционный электрический воздушный клапан, управляемый соленоидом постоянного тока 5 В, максимальное давление 6,3 кгс
• (1) разъем DB 25
• (1) ИС логический буферный элемент 4050HCT
• (1) Транзистор TIP 120 NPN Darlington
В общем, мой друг ты одолел чтение этой статьи об кисть руки – андроида. Работы впереди у тебя будет много. Смело пиши комментарии, развивайся и счастье окажется в твоих руках. Надеюсь, что теперь ты понял что такое кисть руки – андроида и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Комментарии
Оставить комментарий
Робототехника
Термины: Робототехника