Лекция
Привет, Вы узнаете о том , что такое классификация роботов, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое классификация роботов , настоятельно рекомендую прочитать все из категории Робототехника.
Так же как и с понятием «робот» в отношении классификации роботов не существует однозначного общепринятого мнения, из-за чего в разных изданиях, а также интернет-ресурсах, посвященных робототехнике, можно встретить различающуюся классификацию автоматизированных машин. Связано это с тем, что по мере развития робототехнического направления промышленности видоизменяются сами машины, их функциональная нагрузка постоянно увеличивается и неизбежен регулярный пересмотр их разновидностей. В данный момент наиболее целесообразно разбиение всех видов роботов на группы по трем признакам: тип выполняемой работы или решаемой задачи, степень мобильности, тип системы управления. Рассмотрим подробнее каждый из них.
По этому признаку можно выделить 8 разновидностей машин:

Промышленные роботы предназначены для автоматизации всевозможных технологических операций (например сварка, штамповка, металлообработка, сборка готовых изделий и т.д.) на производстве какой либо продукции. Применяются практически во всех отраслях промышленности (машиностроение, приборостроение, нефтехимическая, металлургическая, атомная, автомобильная, авиационная и др.).
Строительные роботы позволяют аналогичным образом автоматизировать огромное количество различных операций, выполняемых в процессе ремонта помещений или строительства новых объектов. Учитывая мировые объемы строительства и неуклонный рост населения планеты Роботизация строительства сейчас весьма актуальна.
Сельскохозяйственные роботы предназначены для выполнения трудоемких и монотонных процессов в сельском хозяйстве. В настоящее время ведется интенсивная разработка таких роботов, и даже есть примеры их использования, например, в Японии.
Транспортные роботы используются, как следует из наименования для автоматического перемещения грузов, либо автономного управления различными транспортными средствами. Транспортными роботами являются самоходные тележки, автопилоты и т.д.
Бытовые роботы. Данный тип роботов применяется в быту и офисах. Ярким примером бытовой автоматизированной машины является набравший приличную популярность робот-пылесос. К бытовым роботам также можно отнести коммуникативных роботов, обеспечивающих эффект присутствия удаленных друг от друга людей, либо способных самостоятельно вести диалог с человеком, и, конечно, многочисленные робоигрушки, предназначенные для развлечений и образовательных в области робототехники целей. В перспективе ожидается появление и более функциональных систем, умеющих выполнять online casino более сложные домашние обязанности такие как: мытье посуды, стирка грязного белья, приготовление пищи и т. п.
Боевые (военные) роботы призваны вывести вооруженные конфликты на качественно иной уровень и предназначены для минимизации непосредственного участия человека в боевых действиях с целью сокращения или исключения вовсе людских потерь, а также для работы в условиях, несовместимых с возможностями человека в военных целях. Разновидностей боевых роботов столько же, сколько и боевых задач для войсковых подразделений: беспилотные с дистанционным управлением самолеты (вертолеты) — разведчики, подводные аппараты и надводные корабли, роботы-минеры, роботы-саперы, роботы-патрульные, роботы для переноски военной амуниции. В силу сложности поставленных перед ними задач современные боевые роботы управляются оператором, но ведутся разработки полностью автономных боевых роботов с искусственным интеллектом, способным принимать решать, однако что не может не вызывать, многочисленные споры сторонников и противников данных машин на правовом поле в части определения ответственности за действия боевых роботов и их последствия.
Перед охранными роботами ставятся задачи по защите вверенных территорий или помещений. В простейшем случае указанные роботы выполняют патрулирование охраняемых периметров и в случае фиксации проникновения злоумышленников сигнализируют об этом дежурным операторам. В последнее время появляется тенденция к оснащению робоохранников нелетальными видами оружия.
Исследовательские роботы используются для сбора всевозможных видов информации об исследуемых объектах, ее переработки и передаче оператору. Объектами могут быть самыми разнообразными: поверхности планет, подводное пространство, подземные шахты, пещеры, полости эксплуатируемых трубопроводов, зараженная местность и другие труднодоступные для человека области.
Можно выделить три класса:
1. Управляемые оператором.
2. Полуавтономные.
3. Автономные.

| Рис. классификация роботов по типу системы управления |
Роботы, управляемые оператором, не способны самостоятельно думать, принимать решения и даже производить собственные вычисления. По сути это просто дистанционно или прямо управляемые машины. К данной категории роботов можно отнести копирующие движения органов управления роботы (простые манипуляторы или роботы андроидного типа), экзоскелеты, роботы, управляемые человеком с пульта управления.
Копирующие роботы в обязательном порядке имеют задающий орган, подобный исполнительному (с масштабом по размерам и усилиям), систему передачи управляющих сигналов и сигналов обратной связи, средства отображения для оператора среды функционирования робота. В результате движение задающего органа, выполняемое оператором, копируется с заданным масштабом исполнительным органом посредством следящих систем.
Экзоскелеты — это антропоморфные конструкции, которые обычно крепятся на подвижные части тела человека, и которые копируют их движения с одновременным увеличение создаваемых усилий. В настоящее время начато активное использование экзоскелетов в медицине для реабилитации людей с травмами позвоночника и другими недугами, приводящими к потере способности самостоятельно передвигаться. Одновременно ведутся эксперименты по использованию экзоскелетов для погрузочно-разгрузочных операций, требующих больших усилий.
Роботы, управляемые с пульта управления. Об этом говорит сайт https://intellect.icu . С подобным принципом знакомы, наверно, все — на примере радиоуправляемых игрушечных моделек. На пульте — система клавиш или рукояток и средства отображения информации. Движение роботу задается человеком с пульта управления через систему исполнительных приводов.
В полуавтоматических роботах ручное управление сочетается с автоматическим. Используется, когда заранее жестко запрограммировать все нужные операции невозможно, а оснащать робота искусственным интеллектом нецелесообразно или невозможно. К полуавтоматическим относятся роботы, которые выполняют определенный запрограммированный набор действий, однако существует необходимость вмешательства оператора для сообщения ему дополнительной информации (например, с помощью целеуказания, указания требуемой последовательности действий и т. д.).
Автономные роботы – это, как следует из наименования, роботы, запрограммированные на самостоятельные действия, без участия человека. К таковым машинам можно отнести как промышленные роботы, занятые выполнением последовательности технологических операций, так и машины, обладающие полноценным искусственным интеллектом. Предельным вариантом автономных роботов являются андроиды или киборги, которые являются героями многочисленных фантастических фильмов. Очевидно, что именно этот класс машин является апогеем развития робототехники и при массовом распространении позволит полноценно взять на себя все наши повседневные бытовые заботы и просто быть незаменимым помощником в любых делах.
По степени мобильности выделяются два класса:
1. Стационарные.
2.Мобильные.
Важнейшие классы роботов широкого назначения — манипуляционные и мобильные роботы.
Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства ввиде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций. Такие роботы производятся в напольном, подвесном и портальномисполнениях. Получили наибольшее распространение в машиностроительных и приборостроительных отраслях.
Мобильный робот — автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами. Такие роботы могут быть колесными, шагающими и гусеничными (существуют также ползающие, плавающие и летающие мобильные робототехнические системы, см. в др. статье)
По характеру выполняемых операций все промышленных роботов подразделяют на три группы, имеющие различные производственно-технологические признаки.
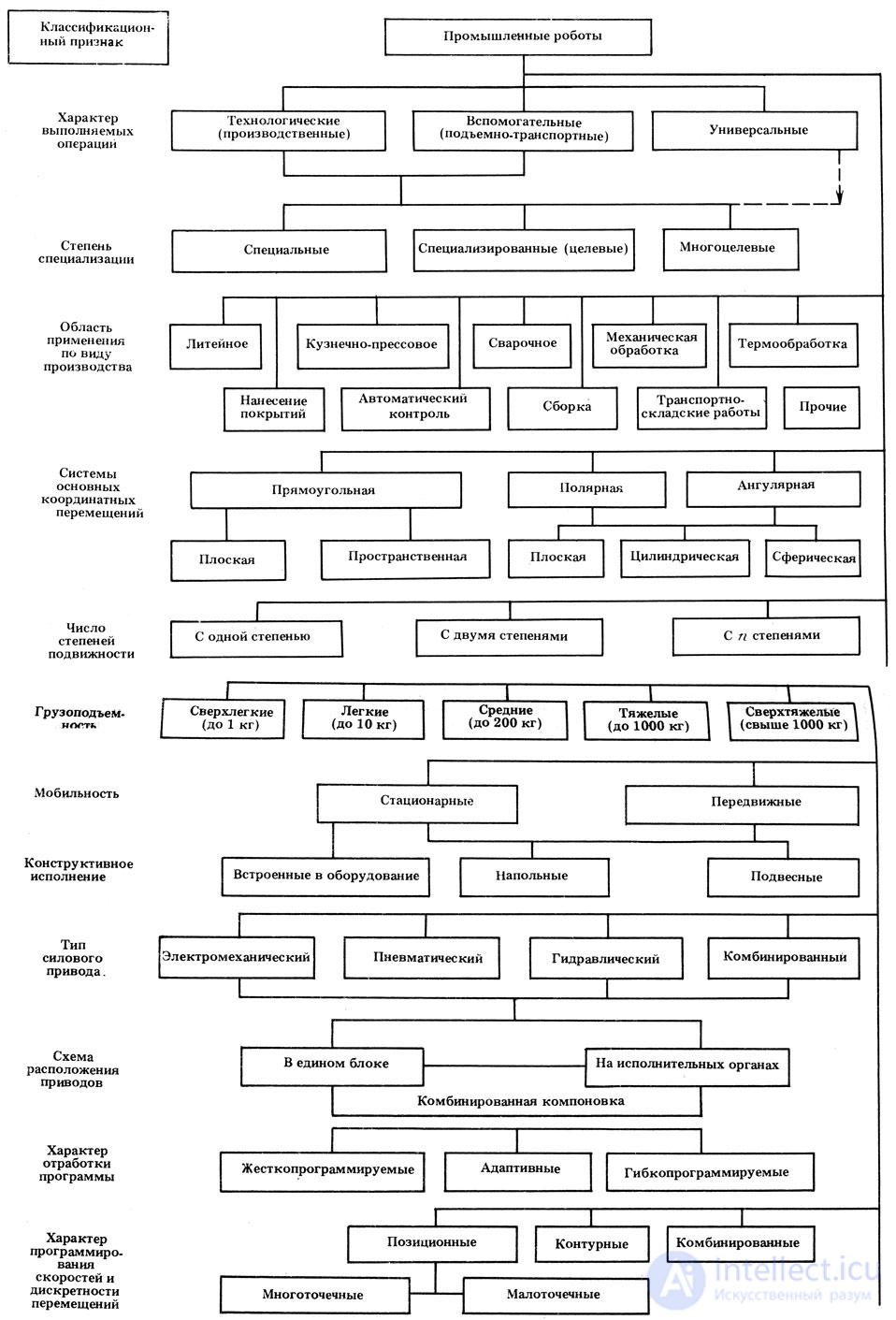
Рис. 4. Классификация промышленных роботов
По степени специализации технологические или вспомогательные промышленных роботов подразделяют на специальные, специализированные и многоцелевые. Функциональные возможности специального промышленных роботов позволяют ему выполнять определенную технологическую операцию или обслуживать конкретную модель основного технологического оборудования. Специализированные промышленных роботов предназначены для выполнения технологических операций одного вида (сварка, окраска, сборка, гибка, штабелирование и т. п.) или (если это вспомогательные ПР) - для обслуживания широкой номенклатуры моделей основного технологического оборудования, объединенных общностью манипуляционных действий. Многоцелевые промышленных роботов предназначены для выполнения различных основных (ТПР) или вспомогательных (ВПР) операций, в том числе и таких, выполнение которых осуществляется разнотипными приемами.
Если промышленных роботов может выполнять и основные, и вспомогательные операции, объединяя признаки многоцелевых Т промышленных роботов и ВПР, он относится к числу универсальных (см. рис. 4).
Функциональные возможности промышленных роботов во многом определяются типом СПУ и характером отработки программ. Большинство применяемых промышленных роботов относится к числу жесткопрограммируемых, программа действий которых содержит полный набор информации, не изменяющийся в процессе работы. Они не обеспечивают корректировки программы при изменении внешней среды.
Адаптивные промышленных роботов осуществляют свои действия с использованием информации об объектах и явлениях внешней среды, полученной в процессе работы. Они имеют сенсорное обеспечение, позволяющее корректировать управляющую программу.
Гибкопрограммируемые (интегральные) промышленных роботов способны формировать программу своих действий на основе поставленной цели и информации об объектах и явлениях внешней среды.
В промышленных роботов применяются три типа СПУ, классифицируемых в соответствии с характером и дискретностью перемещений степеней подвижности,- позиционные (от точки к точке), контурные (по непрерывной траектории) и комбинированные.
По типу представления задающей информации СПУ можно разделить на цикловые (ЦПУ), аналоговые (АПУ), числовые (ЧПУ) и аналого-числовые (гибридные).
Роботы с ЦПУ являются простейшими типами позиционных ПР. Программа систем ЦПУ содержит информацию о последовательности перемещений исполнительных механизмов промышленных роботов или о последовательности и скоростях; пути их перемещений задаются настройкой упоров, воздействующих на конечные переключатели.
В аналоговых СПУ информация задается в виде непрерывно изменяющихся значений физических (аналоговых) величин. В системах ЧПУ (позиционных или контурных) информация представлена в виде цифровых кодов, хранящихся на быстросменном носителе. В гибридных (аналого-числовых) СПУ могут использоваться различные способы представления информации.

| Рис. 1.5.1 Классификация роботов по типу механической части |
Для лучшего понимания отличий между приведенными на схеме типами механических частей роботов ниже приведены короткие комментарии по каждому их виду.
1. Мобильные. Это роботы, принцип действия которых неразрывно связан с перемещением в пространстве, то есть с движением. Перемещаться и двигаться они могут в разных физических средах. Возможно создание робототехнических машин для перемещения по земле или любой твердой поверхности. А могут создаваться и роботы для полетов в воздушном пространстве или плавающие в водной среде.
1.1. Наземные. Такой вид роботов является самым популярным. Это логично, так как на суше больше всего работы, которую надо выполнять. И она очень разнообразна. А значит и машины, которые ее исполняют, имеют большое количество разновидностей. Они могут ездить с помощью колес, катиться на гусеницах, шагать как животные или люди, либо даже ползать как змеи (Рис. 1.5.2)
У каждого из перечисленных видов конструкций есть свои достоинства и недостатки. Поэтому разработчиками используются все виды в зависимости от того, какую задачу выполняет робот. Для одной работы может лучше подходить колесная машина, для другой - гусеничная, а где-то наиболее эффективна шагающая.
 |
|||
| А | Б | В | Г |
| Рис. 1.5.2 Разновидности наземных роботов. А — колесные, Б — гусеничные, В — ползающие, Г —шагающие. | |||
1.2. Воздушные. К данной категории относятся все летающие роботы. Летать они могут по-разному: как самолет (рис. 1.5.3 А) или как вертолет (рис. 1.5.3 Б). Роботы вертолетного типа называют коптерами (copter в переводе с англ. - вертолет). Они имеют 4 или более винта, могут взлетать и садиться вертикально. Эта способность делает их применение очень удобным, поскольку не требуется большая площадка для взлета или посадки. Поэтому они наиболее популярны.
 |
 |
| А | Б |
| Рис. 1.5.3. Воздушные роботы. А — самолетного типа, Б-вертолетного. | |
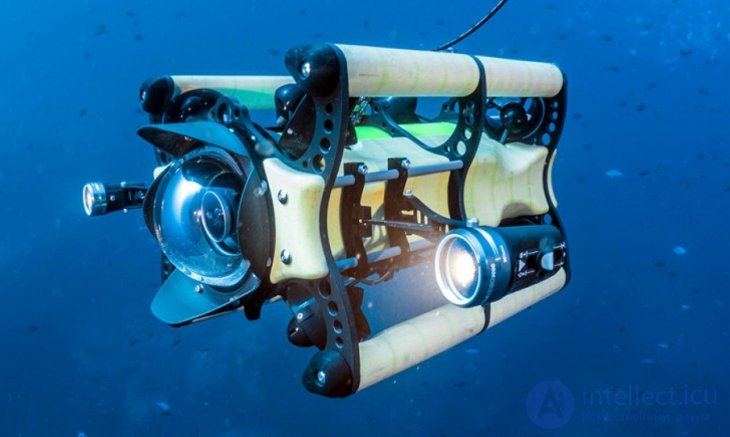
1.3. Водные. Очевидно, что имеются в виду роботы, которые предназначены для плавания по воде или под водой. Первые представляют корабли или лодки с автоматическим управлением (рис. 1.5.4 А), а вторые относятся к классу подводных лодок или батискафов (рис. 1.5.4 Б). Данные машины являются очень специализированными и достаточно редкими по сравнению с наземными и даже с воздушными роботами, т. к. решают узкий круг задач.
 |
 |
| А | Б |
| Рис. 1.5.4 Примеры роботов, работающих в водной стихии. А — надводный патрульный беспилотный катер, Б — подводный дистанционно управляемый аппарат. | |
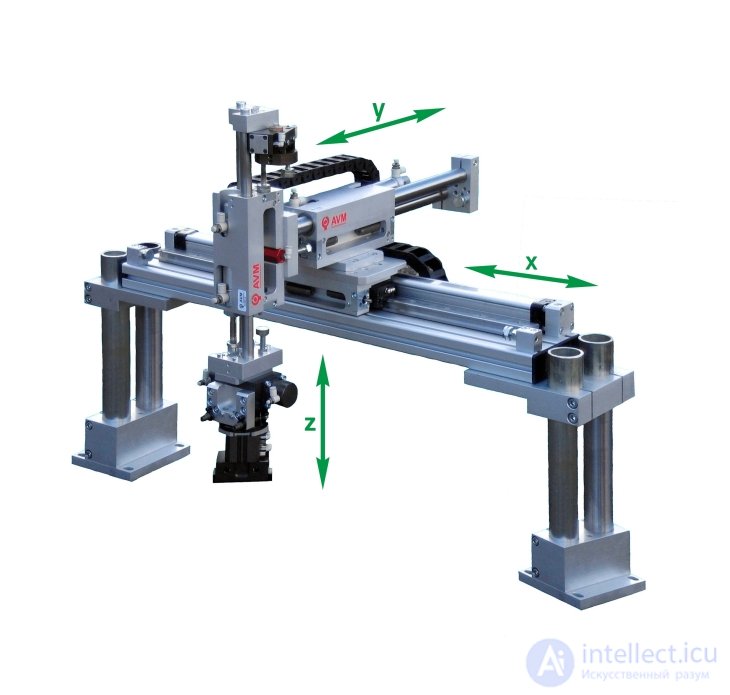
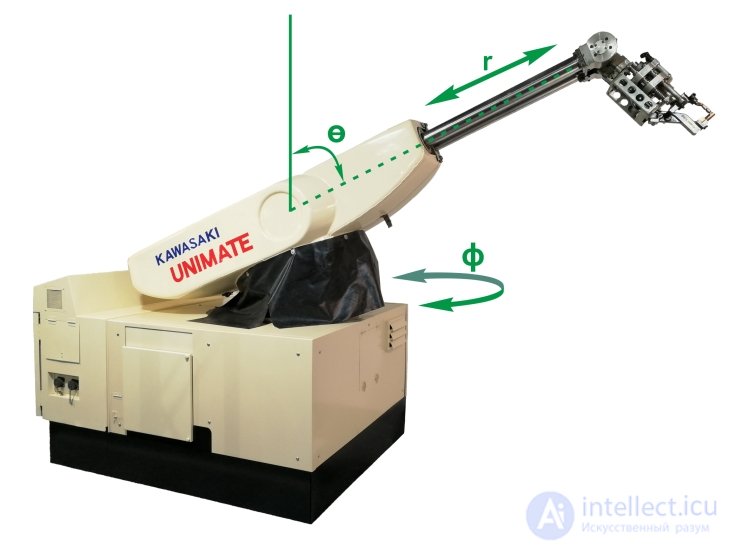
2. Манипуляционные. Можно сказать, что это старейший тип конструкций в робототехнике. По сути, робототехника начиналась именно с манипуляторов. Они впервые стали использоваться в промышленности еще в 60-х годах прошлого века. И они существенно отличаются по принципу действия и конструкции от мобильных роботов. Манипуляционные роботы предназначены для изменения пространственного положения каких-либо предметов, которыми могут быть инструменты, детали или узлы других машин. Они стационарны, то есть установлены на одном месте. Манипуляции с предметами выполняют относительно места своего закрепления. Манипуляционные роботы появились и получили широкое распространение именно на промышленных производствах, поскольку там проще всего создать условия для безопасной и эффективной работы такого робота. В результате за ними закрепилось название «промышленный робот». На рис. 1.5.5 показаны основные виды манипуляционных роботов, которые определяются системами координат, которые используются для управления положением манипулятора.
 |
 |
| А | Б |
 |
 |
| В | Г |
| Рис. 1.5.5 Примеры конструкций роботов-манипуляторов, работающих в разных системах координат. А — в прямоугольной системе координат, Б — в цилиндрической, В — в сферической, Г — в угловой. | |
3. Мобильно-манипуляционные. Эти роботы являются комбинацией манипуляционных и мобильных машин. Проще говоря, это мобильные роботы, на которые установлен один или несколько манипуляторов, способных производить захват предметов и изменять их положение в пространстве. Классическим вариантом такого робота является колесная или гусеничная тележка со смонтированным на ней угловым манипулятором. Его пример уже приводился на рис. 1.4.4. Равно как и показывался пример андроидного робота (рис. 1.1.4, 1.4.7). Человекоподобные машины отличаются тем, что у них всегда есть два манипулятора, конструкция которых очень похожа на строение руки человека.
Анализ данных, представленных в статье про классификация роботов, подтверждает эффективность применения современных технологий для обеспечения инновационного развития и улучшения качества жизни в различных сферах. Надеюсь, что теперь ты понял что такое классификация роботов и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника

Комментарии