Лекция
Сразу хочу сказать, что здесь никакой воды про регулировка скорости робота, и только нужная информация. Для того чтобы лучше понимать что такое регулировка скорости робота , настоятельно рекомендую прочитать все из категории Робототехника.
Регулировка скорости движения робота необходима для выполнения оптималного Объезда предметов, выполнения Слалома или Перемещения предметов.
Первые шаги к объезду предметов сделаны в главе «Алгоритмы управления». Движение вдоль стены с небольшими отклонениями возможно с помощью ПД-регулятора. Однако описанный робот сможет объезжать стены только при малых отклонениях от прямой линии. При резких изгибах робот может потерять контакт со стеной и начать крутиться на месте. Эту проблему можно отчасти разрешить конструктивно.
Вместо того, чтобы жестко указывать конкретную скорость для вашего робота, здесь мы попробуем несколько разных способов настроить скорость вашего робота без необходимости постоянно загружать новый код.
Первый способ, которым мы собираемся отрегулировать скорость, - это использовать простой потенциометр подстройки макетной платы.
Если вы предпочитаете просто контролировать скорость своего робота с помощью дополнительных 4 кнопок на контроллере, это также довольно легко настроить. Во-первых, нам нужно настроить глобальную переменную скорости. В любом месте над настройкой эскиза добавьте что-то вроде этого:
Затем в основном цикле мы можем использовать эту переменную для установки скорости двигателя, используя:
Затем все, что нам нужно сделать, это увеличивать скорость каждый раз, когда мы нажимаем кнопку 1, и уменьшать каждый раз, когда мы нажимаем кнопку 3.
Откройте скетч Ada_CurieBot_RC_buttonSpeed в Arduino IDE и загрузите его в своего робота.
регулировка скорости робота контролируется аналоговым ШИМ, который может занимать ресурсы ЦП. Об этом говорит сайт https://intellect.icu . И выход ШИМ нестабилен.
. Условия состязания
1.1. За наиболее короткое время робот должен пройти трассу, обозначенную черной линией, от места старта до места финиша, обходя препятствия-кегли, расположенные на линии.
1.2. Первое препятствие-кеглю робот должен обойти с левой стороны и далее обходить кегли попеременно с правой и с левой сторон (принцип классического слалома).
1.3. На прохождение дистанции дается не более трех минут.
1.4. В конце дистанции на трассе могут быть установлены ворота, через которые роботу необходимо пройти.
1.5. За столкновение с кеглями или "срезание" маршрута роботу начисляются штрафные очки.
1.6. Во время проведения состязания участники команд не должны касаться роботов.
2. Трасса
2.1. Цвет полигона - белый.
2.2. Цвет линии – черный.
2.3. Ширина линии - 50 мм.
2.4. Минимальный радиус кривизны линии – 300 мм.
2.5. Количество кеглей на трассе - не менее 4 шт.
2.6. Минимальное расстояние между кеглями - 75 см.
2.7. Кегли представляют собой жестяные цилиндры и изготовлены из пустых стандартных жестяных банок, использующихся для напитков (330 мл).
2.8. Кегля обтягивается белым ватманом или бумагой.
2.9. Диаметр кегли - 70 мм.
2.10. Высота кегли - 120 мм.
2.11. Вес кегли - не более 50 гр.
2.12. Ширина ворот не менее 75 см.
2.13. Ворота могут представлять собой простую разметку на полигоне в виде небольших прямоугольников светлого цвета либо представлять собой конструкцию из тонких планок черного цвета (не более 1 см толщиной).
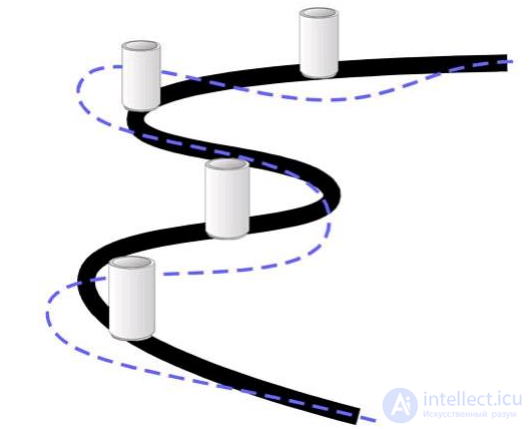
Рис. 1. Пример трассы с расставленными кеглями и возможной
траекторией ее прохождения роботом
3. Робот
3.1. Максимальная ширина робота - 40 см, длина - 40 см.
3.2. Вес робота не должен превышать 10 кг.
3.3. Робот должен быть автономным.
4. Правила отбора победителя
4.1. На прохождение дистанции каждой команде дается не менее двух попыток (точное число определяется судейской коллегией в день проведения соревнований).
4.2. В зачет принимается лучший результат.
4.3. Если робот во время прохождения дистанции потеряет линию более чем на
10 секунд (в течение 10 секунд робот ни разу не окажется над линией), то попытка не засчитывается.
4.4. Если робот собьет или сдвинет кеглю более чем на 5 см, ему засчитываются штрафные очки за каждую сбитую или сдвинутую кеглю (1 штрафное очко за
сдвинутую кеглю, 2 штрафных очка за сбитую кеглю).
4.5. За нарушение порядка прохождения (срезание или пропуск кеглей) роботу засчитывается 3 штрафных очка (за каждое нарушение порядка прохождения).
4.6. В случае, если робот не прошел через финишные ворота в конце трассы, попытка не засчитывается.
4.7. Победителем объявляется команда, потратившая на преодоление дистанции наименьшее время. При этом в первую очередь рассматриваются результаты команд, получивших наименьшее количество штрафных очков.
Робот-пылесос, марсоход Curiosity и футуристичные микродроны, опыляющие растения вместо пчел, — всем им приходится исследовать новое пространство, будь то квартира, поля вокруг фермы или кратер чужой планеты. Такие роботы должны уметь самостоятельно изучать местность, создавать ее карты и выбирать оптимальные маршруты для перемещения.
А как ты думаешь, при улучшении регулировка скорости робота, будет лучше нам? Надеюсь, что теперь ты понял что такое регулировка скорости робота и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Из статьи мы узнали кратко, но содержательно про регулировка скорости робота
Комментарии