Лекция
Сразу хочу сказать, что здесь никакой воды про использование памяти, и только нужная информация. Для того чтобы лучше понимать что такое использование памяти, буферные запоминающие устройства, бзу , настоятельно рекомендую прочитать все из категории Робототехника.
Память играет важную роль в робототехнике, так как позволяет роботам сохранять и извлекать информацию, принимать решения и выполнять задачи. В робототехнике используется несколько типов памяти, каждая из которых имеет свои особенности и применения. Ниже я приведу некоторые из них:
Оперативная память (ОЗУ): ОЗУ используется для временного хранения данных, которые робот использует в процессе работы. Она позволяет быстро читать и записывать данные, но при выключении робота информация из ОЗУ теряется. ОЗУ используется, например, для хранения текущего состояния робота, промежуточных результатов вычислений и временных данных.
Постоянная память: Постоянная память, такая как флэш-память или жесткий диск, используется для долгосрочного хранения данных. В робототехнике она может использоваться для хранения программного обеспечения, настроек системы, карты окружающей среды и других важных данных. Роботы могут загружать данные из постоянной памяти при запуске или в процессе работы.
Эпизодическая память: Эпизодическая память представляет собой механизм, позволяющий роботу сохранять опыт или последовательности событий для последующего использования. Она может использоваться для обучения робота на основе опыта или для воспроизведения предыдущих сценариев. Эпизодическая память может быть реализована с помощью различных алгоритмов и моделей, таких как рекуррентные нейронные сети или методы обучения с подкреплением.
Кэш-память: Кэш-память используется для временного хранения данных, к которым робот часто обращается. Она позволяет ускорить доступ к этим данным, так как кэш находится ближе к процессору или контроллеру, чем основная память. Кэш-память может быть встроена непосредственно в процессор или использоваться на уровне системы.
использование памяти в робототехнике зависит от конкретных задач и требований робота. Разработчики роботов должны учитывать объем доступной памяти, скорость доступа к данным, сохранение информации при выключении питания и другие факторы, чтобы эффективно использовать память и обеспечить надежную работу робота.
буферные запоминающие устройства , также известные как буферы, используются для временного хранения данных в процессе передачи или обработки информации и предназначено для промежуточного хранения информации при обмене ею между устройствами ЭВМ, работающими с разными скоростями.. Они играют важную роль в робототехнике и компьютерных системах в целом.Конструктивно оно может быть частью любого из функциональных устройств. Вот некоторые примеры буферных запоминающих устройств:
Буферы оперативной памяти (буферы ОЗУ): Буферы ОЗУ используются для временного хранения данных перед их обработкой или передачей в другие устройства или подсистемы. Они позволяют сглаживать различия в скорости работы различных компонентов системы, а также обеспечивают более эффективное использование ресурсов.
Буферы ввода-вывода (буферы В/В): Буферы В/В используются для временного хранения данных, которые передаются между устройствами ввода-вывода и основной системой. Они помогают согласовывать разницу в скорости обмена данными между устройствами, а также предотвращают потерю данных при временных задержках или перегрузках.
Буферы дискового кэша: Дисковый кэш - это буферная область памяти, используемая для временного хранения данных, которые будут записаны на жесткий диск или считаны из него. Дисковый кэш ускоряет доступ к данным, так как операции чтения и записи могут выполняться быстрее с использованием буфера, чем напрямую с диска.
Буферы в сетевых коммуникациях: Буферы также используются в сетевых коммуникациях для временного хранения пакетов данных, прежде чем они будут отправлены или обработаны. Буферы в сетевых устройствах, таких как маршрутизаторы или сетевые карты, позволяют сглаживать различия в пропускной способности и обеспечивать более эффективную передачу данных.
Буферные запоминающие устройства помогают согласовывать различия в скоростях работы различных компонентов системы, а также обеспечивают более стабильный и эффективный поток данных.
Ниже описывается бзу , считываемое изображение с ТК, реализованное на фотодиодной матрице (рис. 2.28).
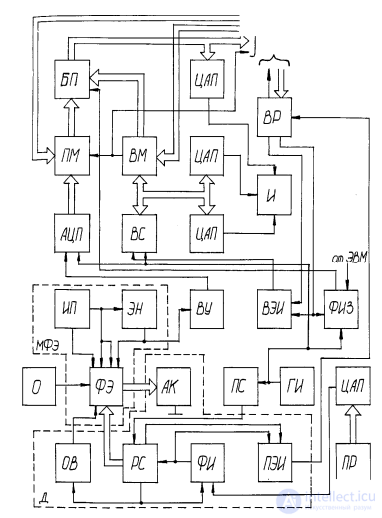
Рис. 2.28. Буферное запоминающее устройство на фотодиодной матрице для считывания среднеформатных полутоновых изображений
БЗУ содержит следующие узлы: О – объектив; ФЭ – фотоприемный элемент; МФЭ – матрица фотоприемных элементов; АК – аналоговый ключ; ОБ – одновибратор; PC – регистр сдвига; ФИ – формирователь импульсов; ИП – источник питания; ПЭИ – первый элемент «И»; ВЭИ – второй элемент «И»; ЭН – элемент нагрузки; ВУ –
видеоусилитель; ПС – первый счетчик; ВС – второй счетчик; ГИ – генератор импульсов; ПР – первый регистр; BP – второй регистр;
ФИЗ – формирователь импульсов записи; ПМ – первый мультиплексор; BP – второй мультиплексор; БП – блок памяти; АЦП – аналогоцифровой преобразователь; ЦАП – цифроаналоговый преобразователь; И – индикатор (видеоконтрольное устройство).
БЗУ работает следующим образом. Об этом говорит сайт https://intellect.icu . На фоточувствительное поле ФЭ с помощью объектива О проектируется изображение выбранного участка рабочей зоны. Преобразование оптической информации в электрический сигнал производится с помощью ПС, PC и АК путем последовательного съема сигнала с каждого ФЭ строки матрицы.
Требуемая частота работы АК, PC, ПС задается ГИ.
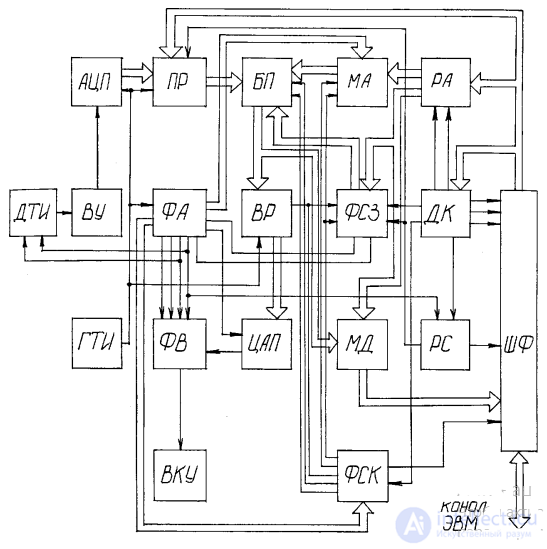
Рис. 2.29. Буферное запоминающее для считывания среднеформатных полутоновых изображений
После подключения последнего ФЭ последней строки матрицы ОВ производит «очистку» ячеек МФЭ. ФИ обеспечивает время накопления видеоинформации МФЭ, устанавливаемого ПР через ЦАП.
ПР имеет также вход для осуществления операции «сброс». Видеосигнал, снимаемый с ЭН (подключен, как и ФЭ, к ИП), оцифровывается АЦП. Запись информации в БП осуществляется по команде от BP (через ФИЗ), расшифровывающего команды, поступающие по шине от ЭВМ.
Причем адрес в БП устанавливается ВМ, а управление режимами записи и сброса БП производится ФИЗ и ВЭИ. В режиме индикации информация (о координатах ячейки матрицы) с ВС поступает через соответствующие ЦАП на И, на третий вход которой подается видеосигнал с ЦАП. При выводе информации на ЭВМ (на индикатор) на ФИЗ подается команда «вывод» (от ЭВМ), по которой формируется импульс записи, поступающий на БП. При этом соответствующим образом управляются ПМ, ВМ. Таким образом, БЗУ позволяет считывать (в память и далее в ЭВМ) малоформатное полутоновое изображение (32×32), индицировать на индикаторе изображение и выводить из ЭВМ на экран индикатора обработанное изображение.
Дальнейшим развитием БЗУ является разработка устройств, обеспечивающих считывание среднеформатных изображений (256×256) и работающих с телевизионными камерами на ПЗС-матрице или видиконе. Ниже описывается вариант такого БЗУ. Устройство содержит следующие узлы (рис. 2.29): ДТИ – датчик ТИ; ВУ – видеоусилитель; АЦП – аналого-цифровой преобразователь; ГТИ – генератор тактовых импульсов; ПР – первый регистр; ФСЗ – формирователь сигналов записи; ФА – формирователь адреса; БП – блок памяти; BP – второй регистр; МД – мультиплексор данных; ЦАП – цифроаналоговый преобразователь; ФВ – формирователь видеосигнала; PC – регистр состояний; МА – мультиплексор адреса; ФСК – формирователь сигналов команд; ДК – дешифратор команд; РА – регистр адреса; ШФ – шинный формирователь; ВКУ – видеоконтрольное устройство.
Принцип действия данного БЗУ во многом аналогичен предыдущему устройству. БЗУ имеет четыре следующих режима: режим
контроля записанной в блоке памяти информации, режим записи кадра, режим выборки информации из блока памяти в ЭВМ и режим записи информации из ЭВМ в блок памяти. Устройство в исходном состоянии находится в режиме контроля. Остальные три режима могут быть в нужное время включены с помощью ЭВМ. После окончания записи кадра или обмена информацией с ЭВМ устройство автоматически переходит в режим контроля. Видеоинформация с ДТИ с помощью ВУ, АЦП и ПР записывается в БП. Управляет записью кадра изображения в БП ЭВМ через
ДК, PC, ФСЗ и ПР. При этом ПР преобразовывает последовательную цифровую информацию в параллельную. Во время преобразования последовательной информации в параллельную ФСК подает на БП сигналы, необходимые для записи, а ФА, вырабатывающий 14-разрядный адрес, через МА осуществляет последовательную коммутацию (по семь разрядов) на адресные входы БП. ПР, ФА и ФСЗ синхронизируются сигналом, поступающим с ГТИ. По окончании полукадра, по приходу на PC следующего кадрового синхроимпульса, РГ снимает сигнал с ФСЗ и ПР и БЗУ автоматически переходит в режим
контроля.
В режиме контроля информация о четырех элементах изображения параллельно считывается из БП, а затем с помощью BP параллельная комбинация чисел преобразуется и подается на ЦАП, выходной сигнал которого суммируется ФВ с синхроимпульсами и гасящими импульсами, поступающими из ФА. По команде от ДК (на ФСК и ШФ) информация из БП считывается в ЭВМ через МД и ШФ. При этом МД выбирает сигналы в зависимости от двух младших разрядов адреса столбцов, с одной из четырех групп микросхем БП. Адрес для считывания устанавливается МА, использующим информацию от РА.
При записи данных в БП из ЭВМ работа устройства аналогична считыванию за исключением того, что ДК не выдает сигнал на ШФ, подключающий выход МД на шину ЭВМ. Кроме того, ДК выдает сигнал на ФСЗ, по которому на выбранную двумя младшими разрядами адреса столбцов, поступающих на ФСЗ, группу микросхем выдается сигнал записи. Данные на БП поступают от ШФ через РА. Адрес в РА заносится предварительно из канала ЭВМ.
Запись информации из ДТИ в память БЗУ происходит за 0,02 с. Дальнейшее усовершенствование этого БЗУ представлено в трех
модификациях. Первая модификация БЗУ позволяет подключать до четырех телевизионных камер и записывать в блок памяти четыре кадра ТИ размерностью 256×256 элементов или один кадр ТИ размерностью 512×512 элементов. Вторая и третья модификации БЗУ обеспечивают соответственно считывание ТИ размерностью 512×512 или 1024×1024 пикселя и 256 градациями яркости.
Одним из путей сжатия видеоинформации является преобразование обычного изображения в контурное. Ниже описываются два
варианта БЗУ, считывающих контурные изображения.
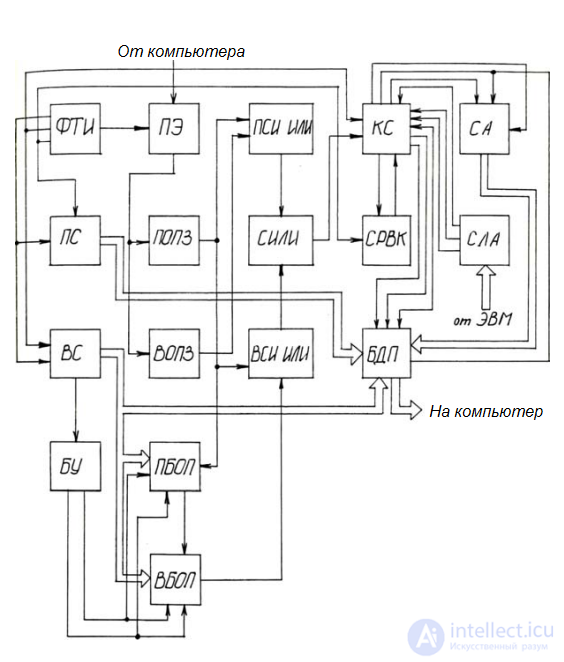
Рис. 2.30. Структурная схема БЗУ, считывающая контурные изображения
На рис. 2.30 дана структурная схема контурного БЗУ, считывающего один кадр ТИ за 0,02 с. БЗУ содержит следующие изделия:
ДТИ – датчик ТИ;
ПЭ – пороговый элемент;
ПОПЗ – первый одновибратор с повторным запуком;
ВОПЗ – второй одновибратор с повторным запуском;
ПСИ ИЛИ – первая схема ИСКЛЮЧАЮЩЕЕ ИЛИ;
ВСИ ИЛИ – вторая схема ИСКЛЮЧАЮЩЕЕ ИЛИ;
ПБОП – первый блок оперативной памяти;
СИЛИ – схема ИЛИ;
КС – командная схема;
ВБОП – второй блок оперативной памяти;
ПС – первый счетчик;
СРВК – схема разрешения выборки кадра;
ВС – второй счетчик;
БУ – блок управления;
БДП – блок двумерной памяти;
СА – схема адресации;
СЛА – схема логики адреса.
Устройство работает в следующих режимах, задаваемых КС CIA:
а) сброс CA; б) стирание БДП; в) запись информации (о контурах изображения объекта) в БДП; г) чтение из БДП.
В режиме сброса БЗУ в исходное состояние сбрасываются счетчики СА. В режиме записи устройство работает синхронно с ДТИ. Пороговый уровень видеосигнала (уровень бинаризации) задается ЭВМ. ПОПЗ и ВОПЗ обеспечивают расширение каждого импульса из пачки так, что реализации сигналов на выходах
ПОПЗ и ВОПЗ оказываются сдвинутыми на длительность одного импульса в пачке. После этого на выходе ПСИ ИЛИ формируется сигнал, характеризующий вертикальные границы изображения объектов. Запись сигналов в ПБОП и чтение сигналов из ВБОП производятся синхронно с информационной частью строки, а чтение информации из ПБОП и запись информации в ВБОП производятся в период отсутствия информации (сигнала) на строке. Таким образом, в режиме чтения из ВБОП информация на ее выходе задержана на длительность одной строки. В результате работы ВСИ ИЛИ производится выделение несовпадающих частей реализации сигналов на двух соседних строках, а в итоге происходит
формирование горизонтальных частей контуров объекта. Таким образом, на выходе СИЛИ будем иметь сигнал, характеризующий
контуры изображения объектов.
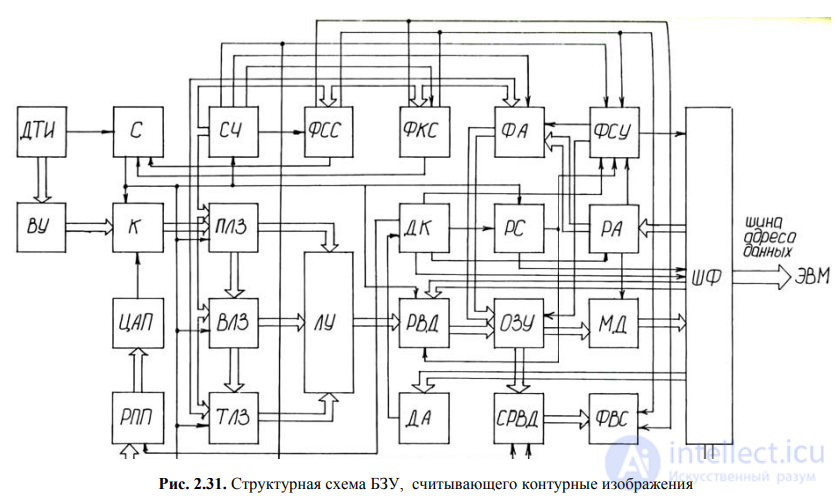
Рис. 2.31. Структурная схема БЗУ, считывающего контурные изображения
Эта информация записывается через СРВК и КС в БДП. Состояние КС задается через СЛА от микроЭВМ. Выборка информации из
БДП производится после сброса СА в исходное состояние.
Отличие описанного БЗУ от известных в том, что за один кадр считывается вся информация о контурах объектов ТИ.
Дальнейшим развитием этого БЗУ является устройство, позволяющее считывать несколько кадров изображения.
Основной недостаток описанных выше БЗУ, заключающийся в неспособности устройства выделять границы элементов изображения, ориентированные горизонтально по строке, устраняется БЗУ, структурная схема которого приведена на рис. 2.31.
БЗУ параллельно выполняет следующие функции: ввод бинарного изображения с ТК в формате 256×256 элементов, локальную
фильтрацию изображения окном 3×3 элемента, выделение контуров изображения, вывод бинарного изображения на экран монитора в
формате 256×256 элементов.
БЗУ содержит следующие узлы: ДТИ – датчик ТИ; ВУ – видеоусилитель; К – компаратор; С – синхрогенератор; Сч – счетчик;
ЦАП – цифроаналоговый преобразователь; ПЛЗ, ВЛЗ, ТЛЗ – первая, вторая и третья линии задержки; РПП – регистр переключения порога; ЛУ – логическое устройство; ФСС – формирователь строчных синхроимпульсов; ФКС – формирователь кадровых синхроимпульсов; ДК – дешифратор команд; ДА – дешифратор адреса; PC – регистр состояний; РА – регистр адреса; РВД – регистр ввода данных; СРВД – сдвиговый регистр ввода данных; ОЗУ – оперативное запоминающее устройство; ФА – формирователь адреса; ФСУ – формирователь сигналов управления; МД – мультиплексор данных; ФВС –
формирователь видеосигнала; ШФ – шинный формирователь.
БЗУ работает со стандартным видеосигналом, поступающим с телевизионной камеры (ДТИ) через ВУ на К. Кадровые и строчные синхроимпульсы подаются на синхрогенератор, который вместе с Сч обеспечивает работу БЗУ. Принцип действия фильтрующего «окна», использованного в БЗУ, основан, во-первых, на организации матрицы 3×3 элемента разложения изображения, во-вторых, анализе (сравнении значения яркости элемента «окна» с пороговым значением) и, в-третьих, устранении («обнулении») неинформативных элементов изображения. Для этого в БЗУ включены три ЛЗ. Для создания матрицы 3 × 3 (3 столбца по 3 строки) необходимо, чтобы в первой ЛЗ сигнал развертки запоминался (задерживался) на 3 элемента разложения, во второй и третьей ЛЗ – последовательно на время длительности развертки строки матрицы разложения
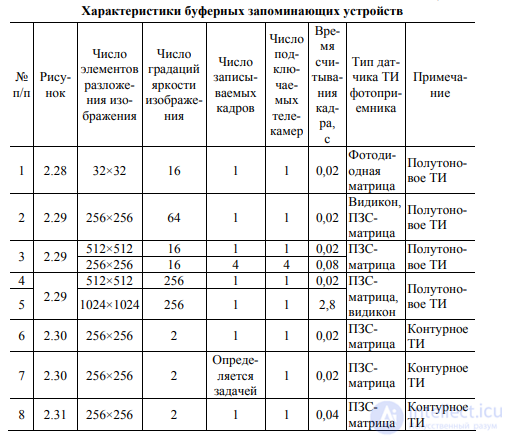
Т а б л и ц а 2.8 Характеристики буферных запоминающих устройств
Далее с помощью ЛУ, использующего сигналы со всех ЛЗ, производится сравнение значения яркости элемента фильтрующего
«окна» с пороговым значением и обнуление неинформативных элементов изображения. Сформированный таким образом сигнал, характеризующий контур изображений, может записываться через РВД в ОЗУ; этот же сигнал может записываться в ОЗУ ЭВМ и выводиться на контрольный монитор. В последнем случае видеосигнал подается из ОЗУ в СРВД, который преобразует параллельный код в последовательный, а затем – в ФВС, обеспечивающий подачу информативного сигнала на монитор. Для создания растра на экране монитора формируются синхроимпульсы с помощью ФСС и ФКС.
Их работа полностью зависит от состояния Сч. ШФ выполняет роль формирователя сигналов ввода-вывода информации и сигналов управления.
БЗУ обеспечивает возможность работы ОЗУ как с ЭВМ, так и автономно. Переключение режимов работы осуществляется ФА, которым управляет ФСУ. Этот блок также управляет ОЗУ.
ФСУ может работать как в автоматическом режиме (в зависимости от состояния синхронизатора), так и по командам ЭВМ. Этой цели служит ДК, который управляет также РА, РПП, PC, ФСУ.
Характеристики описанных выше БЗУ приведены в табл. 2.8.
Для робототехники также используются другие тип памяти
А как ты думаешь, при улучшении использование памяти, будет лучше нам? Надеюсь, что теперь ты понял что такое использование памяти, буферные запоминающие устройства, бзу и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Комментарии
Оставить комментарий
Робототехника
Термины: Робототехника