Лекция
Привет, мой друг, тебе интересно узнать все про управление на основе поля потенциалов, тогда с вдохновением прочти до конца. Для того чтобы лучше понимать что такое управление на основе поля потенциалов , настоятельно рекомендую прочитать все из категории Робототехника.
Ранее поле потенциалов было определено как дополнительная функция затрат в планировании движений робота, но поле потенциалов может также использоваться для непосредственной выработки траектории движения робота, что позволяет полностью отказаться от этапа планирования пути. Для достижения этой цели необходимо определить притягивающее усилие, которое влечет манипулятор робота в направлении его целевой конфигурации, и поле потенциалов, отталкивающее манипулятор, которое отводит манипулятор от препятствий. Такое поле потенциалов показано на рисунке. Его единственным глобальным минимумом является целевая конфигурация, а стоимость измеряется суммой расстояния до целевой конфигурации и дальности до препятствий. Для формирования поля потенциалов, показанного на этом рисунке, не требовалось никакого планирования. Благодаря такой их особенности поля потенциалов могут успешно применяться в управлении в реальном времени. На рисунке показаны две траектории робота, осуществляющего восхождение к вершине в поле потенциалов при двух различных начальных конфигурациях. Об этом говорит сайт https://intellect.icu . Во многих приложениях поле потенциалов может быть эффективно рассчитано для любой конкретной конфигурации. Кроме того, оптимизация потенциала сводится к вычислению градиента потенциала для текущей конфигурации робота. Такие вычисления обычно являются чрезвычайно эффективными, особенно по сравнению с алгоритмами планирования пути, которые связаны с затратами, характеризующимися экспоненциальной зависимостью от размерностей пространства конфигураций (от степеней свободы).
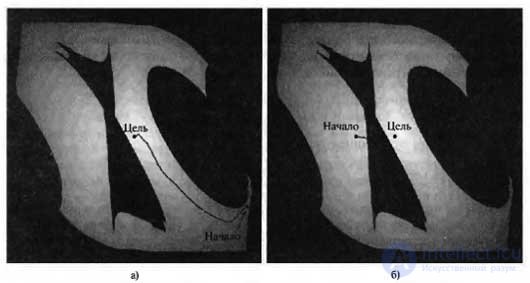
Метод управления на основе поля потенциалов. Траектория робота восходит по градиенту поля потенциалов, состоящего из отталкивающих усилий, обусловленных наличием препятствий, и притягивающих усилий, которые соответствуют целевой конфигурации: успешно проделанный путь (а); локальный оптимум (б)
Тот факт, что подход на основе поля потенциалов позволяет так эффективно находить путь к цели, даже если при этом приходится преодолевать большие расстояния в пространстве конфигураций, ставит под вопрос саму целесообразность использования планирования в робототехнике. Действительно ли методы на основе поля потенциалов позволяют решать все задачи, или такая ситуация, как в данном примере, является просто результатом благоприятного стечения обстоятельств? Ответ заключается в том, что в данном случае обстоятельства действительно складывались благоприятно, а в других условиях поля потенциалов имеют много локальных минимумов, которые могут стать ловушкой для робота. В данном примере робот приближается к препятствию, вращая шарнир своего плеча до тех пор, пока не заходит в тупик, оказавшись не с той стороны препятствия, с какой нужно. Поле потенциалов не имеет достаточно развитой конфигурации для того, чтобы вынудить робот согнуть свой локоть, что позволило бы ему пропустить манипулятор под препятствием. Иными словами, методы на основе поля потенциалов превосходно подходят для локального управления роботом, но все еще требуют глобального планирования. Еще одним важным недостатком, связанным с использованием поля потенциалов, является то, что усилия, вырабатываемые при этом подходе, зависят только от положений препятствия и робота, а не от скорости робота. Таким образом, метод управления на основе поля потенциалов в действительности является кинематическим и может оказаться неприменимым для быстро движущегося робота.
Если я не полностью рассказал про управление на основе поля потенциалов? Напиши в комментариях Надеюсь, что теперь ты понял что такое управление на основе поля потенциалов и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Из статьи мы узнали кратко, но содержательно про управление на основе поля потенциалов
Комментарии