Лекция
Привет, мой друг, тебе интересно узнать все про робототехническое восприятие, тогда с вдохновением прочти до конца. Для того чтобы лучше понимать что такое робототехническое восприятие , настоятельно рекомендую прочитать все из категории Робототехника.
робототехническое восприятие — это процесс, в ходе которого роботы отображают результаты сенсорных измерений на внутренние структуры представления среды. Задача восприятия является сложной, поскольку информация, поступающая от датчиков, как правило, зашумлена, а среда является частично наблюдаемой, непредсказуемой и часто динамической. В качестве эмпирического правила можно руководствоваться тем, что качественные внутренние структуры представления обладают тремя свойствами: содержат достаточно информации для того, чтобы робот мог принимать правильные решения, построены так, чтобы их можно было эффективно обновлять, и являются естественными в том смысле, что внутренние переменные соответствуют естественным переменным состояния в физическом мире.
Робототехническое восприятие (или восприятие роботов) – это способность роботов и автоматических систем воспринимать и анализировать информацию из окружающей среды для принятия решений и выполнения задач. Восприятие играет важную роль в создании автономных и умных роботов, которые способны функционировать в различных средах, взаимодействовать с людьми и другими роботами, а также выполнять задачи с минимальным воздействием человека.
Системы робототехнического восприятия обычно используют различные датчики для сбора информации о внешнем мире. Некоторые из наиболее распространенных типов датчиков включают:
Визуальные датчики: Камеры и видеокамеры позволяют роботам видеть окружающую среду, алгоритмы обработки изображений позволяют распознавать объекты, лица, движущиеся объекты и другие характеристики.
Датчики расстояния: Ультразвуковые датчики, лазерные сканеры (LiDAR) и инфракрасные датчики используются для измерения расстояния до объектов и создания карты окружающей среды.
Датчики касания: Такие датчики позволяют роботу определять контакт с объектами и измерять силу воздействия.
Инерционные датчики: Гироскопы и акселерометры используются для определения ориентации и ускорения робота.
Датчики звука: Микрофоны позволяют роботам распознавать звуки и голоса.
Датчики давления: Они позволяют роботам определять давление или силу, с которой они взаимодействуют с окружающей средой.
Модели перехода и восприятия для частично наблюдаемой среды могут быть представлены с помощью фильтров Калмана, скрытых марковских моделей и динамических байесовских сетей; кроме того, в указанной главе были описаны и точные, и приближенные алгоритмы обновления доверительного состояния — распределения апостериорных вероятностей по переменным состояния среды. Об этом говорит сайт https://intellect.icu . Было приведено несколько динамических моделей байесовских сетей для этого процесса. А при решении робототехнических задач в модель в качестве наблюдаемых переменных обычно включают собственные прошлые действия робота. На рисунке показана система обозначений, используемая в данной главе: xt — это состояние среды (включая робот) во время t; zt — результаты наблюдений, полученные во время t; At — действие, предпринятое после получения этих результатов наблюдения.
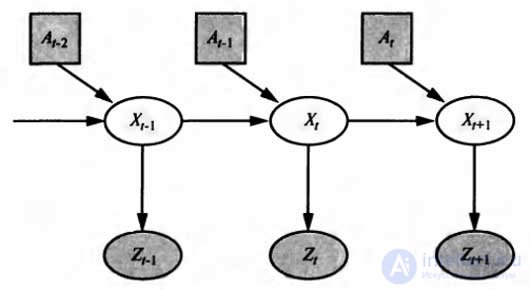
Процесс робототехнического восприятия, рассматриваемый как временной алгоритмический вывод на основании последовательностей действий и измерений, который демонстрируется на примере динамической байесовской сети
Задача фильтрации, или обновления доверительного состояния состоит в том, что должно быть вычислено новое доверительное состояние Р (xt+1 I z1:t+1, a1:t) на основании текущего доверительного состояния Р (xt I z1: t, a1:t-1) и нового наблюдения zt+1. Принципиальные различия по сравнению с указанной главой состоят в следующем: во-первых, результаты вычислений явно обусловлены не только действиями, но и наблюдениями, и, во-вторых, теперь приходится иметь дело с непрерывными, а не с дискретными переменными. Таким образом, необходимо следующим образом откорректировать рекурсивное уравнение фильтрации для использования в нем интеграции, а не суммирования:
P(Xt+1 l I Z1:t+1 l,a1:t) = aP(zt+1 l Xt+1) ∫ P(Xt+1, xt. at) P(xt l z1:t, a1:t-1) dxt
Это уравнение показывает, что апостериорное распределение вероятностей по переменным состояния х во время t+1 вычисляется рекурсивно на основании соответствующей оценки, полученной на один временной шаг раньше. В этих вычислениях участвуют данные о предыдущем действии at и о текущих сенсорных измерениях zt+1. Например, если цель заключается в разработке робота, играющего в футбол, то xt+1 может представлять местонахождение футбольного мяча относительно робота. Распределение апостериорных вероятностей Р (Xt | z1:t, a1:t-1) — это распределение вероятностей по всем состояниям, отражающее все, что известно о прошлых результатах сенсорных измерений и об управляющих воздействиях. Уравнение показывает, как рекурсивно оценить это местонахождение, инкрементно развертывая вычисления и включая в этот процесс данные сенсорных измерений (например, изображения с видеокамеры) и команды управления движением робота. Вероятность P(xt+1 | xt, at) называется моделью перехода, или моделью движения, а вероятность Р (zt+1 I xt+1) представляет собой модель восприятия.
Полученная с помощью датчиков информация обрабатывается и интерпретируется алгоритмами компьютерного зрения, машинного обучения, искусственного интеллекта и другими методами. Результаты анализа помогают роботу принимать решения и планировать свои действия в соответствии с задачами, которые ему предстоит выполнить.
Современные роботы часто объединяют данные с разных датчиков для получения более полной и точной картины окружающей среды. Это позволяет им успешно выполнять сложные задачи, такие как навигация в неизвестных средах, избегание препятствий, взаимодействие с людьми и т.д. Развитие робототехнического восприятия играет ключевую роль в развитии автономных роботов и искусственного интеллекта.
Если я не полностью рассказал про робототехническое восприятие? Напиши в комментариях Надеюсь, что теперь ты понял что такое робототехническое восприятие и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Из статьи мы узнали кратко, но содержательно про робототехническое восприятие
Комментарии
Оставить комментарий
Робототехника
Термины: Робототехника