Лекция
Привет, Вы узнаете о том , что такое датчики, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое датчики, сенсоры, виды датчиков, sensors , настоятельно рекомендую прочитать все из категории Датчики и сенсоры, Технические измерения и измерительные приборы .
ПРЕОБРАЗОВАТЕЛИ НЕЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ В ЭЛЕКТРИЧЕСКИЕ СИГНАЛЫ ( датчики )
Датчик (sensors)— средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем . Датчики, выполненные на основе электронной техники, называются электронными датчиками. Отдельно взятый датчик может быть предназначен для измерения (контроля) и преобразования одной физической величины или одновременно нескольких физических величин.
Датчик — конструктивно обособленное устройство, содержащее один или несколько первичных измерительных преобразователей . Датчик предназначен для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем.
Датчик может дополнительно содержать промежуточные измерительные преобразователи, а также меру. Датчик может быть вынесен на значительное расстояние от устройства, принимающего его сигналы. При нормированном соотношении значения величины на выходе датчика с соответствующим значением входной величины датчик является средством измерений .
В настоящее время термины «датчик» и «сенсор» используются как равнозначные для обозначения измерительного преобразователя, выполняющего функции восприятия входной величины и формирования измерительного сигнала, хотя термин «сенсор» акцентирует внимание на восприятии входной величины, а термин «датчик» — на формировании и выдаче измерительного сигнала(данных).
В состав датчика входят чувствительные и преобразовательные элементы. Основными характеристиками электронных датчиков являются чувствительность и погрешность.
Датчики широко используются в научных исследованиях, испытаниях, контроле качества, телеметрии, системах автоматизированного управления и в других областях деятельности и системах, где требуется получение измерительной информации.
Датчики являются элементом технических систем, предназначенных для измерения, сигнализации, регулирования, управления устройствами или процессами. Датчики преобразуют контролируемую величину (давление, температура, расход, концентрация, частота, скорость, перемещение, напряжение, электрический ток и т. п.) в сигнал (электрический, оптический, пневматический), удобный для измерения, передачи, преобразования, хранения и регистрации информации о состоянии объекта измерений.
Исторически и логически датчики связаны с техникой измерений и измерительными приборами, например термометры, расходомеры, барометры, прибор «авиагоризонт» и т. д. Обобщающий термин датчик укрепился в связи с развитием автоматических систем управления, как элемент обобщенной логической концепции датчик — устройство управления — исполнительное устройство — объект управления. В качестве отдельной категории использования датчиков в автоматических системах регистрации параметров можно выделить их применение в системах научных исследований и экспериментов.
Чувствительные элементы, преобразующие контролируемую или регулируемую величину в выходной сигнал, удобный для дистанционной передачи или дальнейшей обработки, называют датчиками. Датчики, преобразующие неэлектрические величины в электрические, являются важной частью устройств автоматики оборудования для ТП производства РЭС и машиностроения, пищевой, фармацевтической и т.д. сфер применения. Принципы действия датчиков разнообразны:
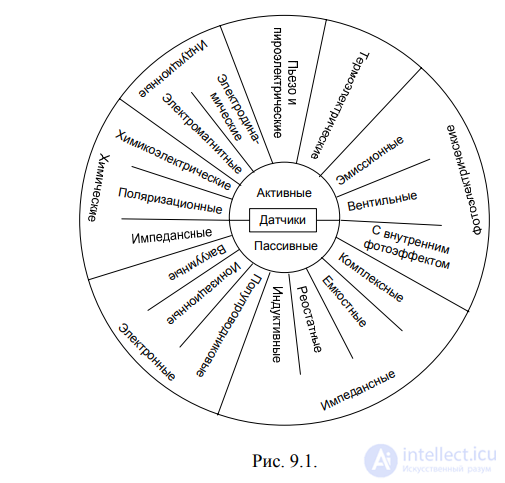
Активные датчики – источники электрической энергии, возникающие за счет преобразования (с определенным коэффициентом) неэлектрической энергии в электрическую.
Пассивные датчики создают электрические сигналы, пропорциональные неэлектрическим величинам, управляя током от вспомогательных источников. Наиболее важной группой пассивных датчиков, называемых также модуляционными или параметрическими, являются датчики полного сопротивления (импедансные). Электрический импеданс – сопротивление
переменному току. Свойства, которыми должны обладать каждый из датчиков, чтобы соответствовать своему назначению, весьма разнообразны и часто противоречивы.
Требования, предъявляемые к датчикам, состоят в следующем:
1) однозначность зависимости между входной и выходной величинами, без гистерезиса. Это свойство обусловлено чисто конструктивными и технологическими характеристиками и не связано с принципом действия датчика, оно может быть хорошо выполнено у большинства датчиков, но не полностью выполняется у датчиков, основанных на изменении свойств твердого диэлектрика (например, в зависимости от температуры), где иногда имеет место гистерезис.
2) удобная форма зависимости между входной и выходной величинами, обычно линейная. В частности, емкостные датчики позволяют реализовать не только линейные, но и любые другие зависимости, в особенности гиперболические, экспоненциальные, логарифмические, степенные и т.д.
3) высокая чувствительность. В частности, чувствительность емкостных датчиков трудно сравнить с чувствительностью датчиков других типов, ее
можно выразить только для каждого типа датчика. При обычных условиях чувствительность емкостных датчиков примерно равна чувствительности
других импедансных датчиков. Что же касается величины выходного сигнала, то она колеблется от единиц милливольт до единиц вольт.
4) стабильность характеристики во времени. Она зависит от типа датчика. Так у емкостных датчиков с воздушным диэлектриком она
удовлетворительна, тогда как с некоторыми диэлектриками – она нестабильна.
5) однонаправленность действия: нагрузка выходной цепи не должна оказывать никакого влияния на измеряемую неэлектрическую величину. У
радиационных (фото– ) и емкостных датчиков это условие выполняется идеально.
6) малая постоянная времени, минимальная инерционность: большинство емкостных датчиков позволяет получать меньшую постоянную времени по
сравнению с другими датчиками. Лучшими в этом смысле являются только фотоэлектрические и радиационные датчики. Емкостные датчики
обеспечивают возможность слежения за процессами, длящимися доли микросекунды.
7) независимость выходных параметров от внешних факторов. Температура, положение в пространстве, вибрации и т.д. оказывают влияние
на характеристики датчиков. Это влияние можно учесть при конструировании датчиков. Только датчики, основанные на изменении
диэлектрической постоянной различных материалов, бывают более чувствительны к температуре.
8) большая перегрузочная способность. Она является чисто
конструктивным параметром, редко когда можно перегрузить датчик. Пока
датчик выдерживает данное воздействие, выходной электрической цепи
перегрузка не грозит.
9) стойкость по отношению к химическим, атмосферным и иным
агрессивным влияниям – это свойство конструкции датчика, оно не
ограничено принципом действия.
10) простота и технологичность конструкции. С этой точки зрения
емкостные датчики идеальны для конструирования и производства.
Подавляющее большинство емкостных датчиков можно изготовить на
металлорежущих станках, они просты по конструкции, удобны в сборке.
11) возможность взаимозаменяемости отдельных образцов. У емкостных датчиков точность обычно значительно выше требуемой. Этим они положительно отличаются от аналогичных индуктивных датчиков и датчиков сопротивлений.
12) простота монтажа и эксплуатации. Емкостные датчики могут быть изготовлены как обычные детали типа арматуры, следовательно, в
наибольшей степени соответствуют этому требованию.
13) требования по ограничению использования дорогостоящих материалов и веществ.
14) требование по недопустимости использования материалов с токсическими свойствами и некоторые другие.
Наибольшее распространение в автоматике нашли следующие датчики:
активного сопротивления (резисторные, реостатные, потенциометрические),
емкостные, индуктивные, электротепловые, электромашинного типа,
фотоэлектрические.
Обычно в системе автоматического управления ТП для передачи
информации используются электрические сигналы. Поэтому широко
применяются датчики, преобразующие неэлектрические сигналы в
электрические.
Датчики могут классифицироваться по назначению: датчики
температуры, давления, уровня, линейных и угловых перемещений, состава
вещества, оптических величин и т. п. Возможна классификация и по
параметру датчика, изменяющемуся в результате преобразования
измеряемой величины, – датчики активного сопротивления, емкостные,
индуктивные и т.д.
Резисторные датчики. Их принцип действия основан на изменении
электрического сопротивления R при изменении длины l, площади S или
удельного электрического сопротивления ρ. Сопротивление датчика R=ρl/S.
Основной характеристикой такого датчика, измеряющего перемещение,
является зависимость R от перемещения, т.е. R=f(l), при этом
чувствительность датчика (η)
η = dR/dl = ρ/S. (9.1)
Такие датчики могут работать в цепях постоянного и переменного тока. Разновидностью резистивных датчиков являются потенциометрические датчики и тензорезисторы (тензодатчики)
Потенциометрические датчики используются в системах автоматического управления ТП (САУ ТП) для измерения угловых и линейных перемещений. Измеряемая величина x преобразуется в перемещение движка потенциометра, которому соответствует выходное напряжение Uвых. Конструктивное исполнение датчиков разнообразно. Переменные резисторы выполняются из обмоточного провода, металлических пленок, полупроводниковых материалов. Их каркас выполняется плоским или цилиндрическим, в случае преобразования поступательных перемещений, и кольцевым, для преобразования угловых перемещений. В качестве обмоточного провода используются материалы с высоким удельным электрическим сопротивлением (манганин, константан, нихром,…). Для повышения износоустойчивости провода, в качестве материала скользящего константа, применяются сплавы из благородных металлов: платина с иридием, платина с палладием. Диаметр намоточного провода выбирается по требуемой точности и сопротивлению. Так, для датчиков высокого класса точности диаметр провода 0,03÷0,1 мм, а для низкого – 0,3÷0,4 мм. Исключение составляют реохорды, сверхвысокоточные, для них диаметр провода – 1,0÷2,0 мм.
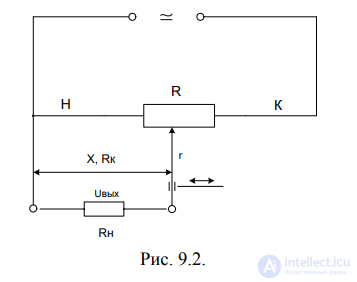
Обмоточный провод датчика покрывают слоем эмали или окислов. Подвижный токосъемный контакт, выполненный в виде щетки или движка, изготавливают из сплавов платины с иридием, платины с бериллием, серебра или фосфористой бронзы. Для обеспечения надежной работы датчика, при 81 скольжении по защищенным поверхностям обмотки датчика, усилие на скользящий контакт, обеспечивают в пределах (0,5÷15,0) 102 Н. Зависимость Uвых=f(x) может быть линейной и нелинейной. Для потенциометра, изображенного на рис. 9.2 по

где α = x / l – отношение перемещения движка датчика к длине всей намотки; RH RП β = / – отношение сопротивления нагрузки к полному сопротивлению потенциометра. Если Rн>>R, то

Зависимость относительного изменения Uвых/Uвх=f(α) при различных значениях β имеет вид, приведенный на рис. 9.3.

Чувствительность датчика при малых перемещениях

Проволочные датчики имеют достаточно высокую точность, но недостатком их является ступенчатость характеристики Uвых из-за дискретного изменения сопротивления датчика (см. рис. 9.4.) при перемещениях щетки с витка на виток, исключения составляют реохорды.

Ширина ступеньки lm равна шагу намотки провода, а высота Rb – сопротивление одного витка. Зона нечувствительности или абсолютная погрешность:

где R – сопротивление датчика, а ω – число витков обмотки датчика. Относительная погрешность:

Датчики имеют также технологические погрешности. Об этом говорит сайт https://intellect.icu . У датчиков высокого класса точности δ≤0,01 %, для среднего класса 0,25≤δ≤0,5 %. Динамические свойства потенциометрических датчиков зависят от характера нагрузки. Если нагрузка активная, то датчик эквивалентен безинерционному звену с передаточной функцией:

где R – полное сопротивление, Ом; Rx – сопротивление потенциометра между точками Н (см рис. 2.) и касания движка; r – сопротивление между точками К и касания движка, Ом. Если нагрузка реактивная, то датчик эквивалентен апериодическому или форсирующему звену. Например, для индуктивной нагрузки
Тензорезисторы используют для измерения сил и деформаций твердых тел. Существуют проволочные, фольговые, пленочные и полупроводниковые тензорезисторы. Действие проволочных, пленочных и фольговых тензорезисторов основано на зависимости R=f(l) или R=f(S). Значительное распространение получили наклеиваемые фольговые тензорезисторы. Они имеют ряд преимуществ перед проволочными, т. к. обеспечивают лучшую теплоотдачу и высокую эффективность использования при наклейке на упругий элемент. Сопротивление фольговых тензорезисторов достигает n·100 Ом, длина – 3 мм, а толщина – от 0,025 до 0,012 мм.
В последние годы широко используются пленочные тензометры, получаемые путем вакуумной возгонки тензочувствительного материала и последующей его конденсации на основание. В качестве тензочувствительного материала используются как металлические сплавы, так и полупроводники. Важным достоинством пленочных и фольговых тензорезисторов является то, что при их изготовлении можно получить решетку любого рисунка.
Относительная тензочувствительность тензорезистора ( / ) /( / ) Т η = ΔR R Δl l (9.9) где R – сопротивление тензодатчика, ∆R – его изменение, lТ – длина тензочувствительного элемента, ∆l – изменение длины датчика, вызванное измеряемой деформацией. В зависимости от сплава, чувствительность колеблется в широких пределах, так для

Сопротивление тензорезистора колеблется обычно от 100 до 200 Ом, измеряемая деформация не превышает 1 %. Проволочные тензорезисторы имеют малые ТКР.
В качестве полупроводниковых тензорезисторов используют германиевые или кремниевые пластины. Длина тензорезистора составляет 5÷15 мм, они обладают высокой относительной чувствительностью в пределах от 100 до 200 и сопротивлением от 50 Ом до 5 кОм. Высокое значение относительной чувствительности позволяет снизить требования к усилителям и использовать их для измерения в широком диапазоне деформаций при наличии больших электромагнитных помех. Разработаны тензодатчики давления модульного типа в виде гибридных интегральных схем, в которых на общем керамическом основании размещены датчик и операционный усилитель. В них датчик выполняется по мостовой схеме, элементы которой нанесены на поверхность кремниевой пластины диффузионным способом. Коэффициент чувствительности такого датчика достигает 90 %, погрешность – 2 %. Металлические тензодатчики обладают высокой точностью и стабильностью; они рассчитаны на широкую область применения. Полупроводниковые тензодатчики обычно применяются для динамических измерений в широком диапазоне частот. Как, правило тензорезисторы включаются в цепь или по схеме делителя напряжения или по мостовой схеме. Цепь делителя R1, R2 питается от источника напряжения U. Выходное напряжение Uд подается на RH. Rдатчика может быть на месте R1 или R2 (см. рис. 9.5.).

В мостовой схеме Rд может занимать любое место, т. е. R1, R2, R3 или R4 (см рис. 9.6.).
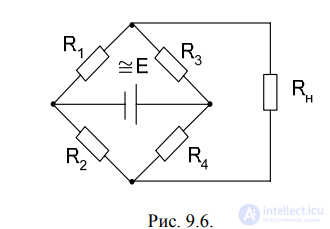
В последнем случае, если один из R1, R2, R3 и R4 выполняет функцию датчика, то любой другой может быть задатчиком, а выходной сигнал Uвых=f(R1R4/R2R3).
Да́тчик, сенсор — конструктивно обособленное устройство, содержащее один или несколько первичных измерительных преобразователей . Датчик предназначен для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем .
Датчик может дополнительно содержать промежуточные измерительные преобразователи, а также меру. Датчик может быть вынесен на значительное расстояние от устройства, принимающего его сигналы. При нормированном соотношении значения величины на выходе датчика с соответствующим значением входной величины датчик является средством измерений .
В настоящее время термины «датчик» и «сенсор» используются как равнозначные для обозначения измерительного преобразователя, выполняющего функции восприятия входной величины и формирования измерительного сигнала, хотя термин «сенсор» акцентирует внимание на восприятии входной величины, а термин «датчик» — на формировании и выдаче измерительного сигнала (данных).
Многофункциональные датчики могут воспринимать и преобразовывать нескольких входных величин, и, помимо основной функции (восприятие величины и формирование измерительного сигнала) выполнять ряд дополнительных функций, таких как функции фильтрации, обработки сигналов и т.п.
Датчики широко используются в научных исследованиях, испытаниях, контроле качества, телеметрии, системах автоматизированного управления и в других областях деятельности и системах, где требуется получение измерительной информации.
Широко встречаются следующие определения:
Эти определения соответствуют практике использования термина производителями датчиков. В первом случае датчик это небольшое, обычно монолитное устройство электронной техники, например, терморезистор, фотодиод и т. п., которое используется для создания более сложных электронных приборов. Во втором случае — это законченный по своей функциональности прибор, подключаемый по одному из известных интерфейсов к системе автоматического управления или регистрации. Например, фотодиоды в матрицах (фото) и др. В третьем и четвертом определении акцент делается на том, что датчик является конструктивно обособленной частью измерительной системы, воспринимающей информацию, а следовательно обладающий самодостаточностью для выполнения этой задачи и определенными метрологическими характеристиками.
Сенсор и датчик - в большинстве случаев одно и то же. Ранее в значении считывания физических величин и напр. определения состояния использовался преимущественно (если не исключительно) русский термин. Термин "сенсор" поначалу употреблялся только по отношению к устройствам, реагирующим на прикосновение человека ("сенсорные устройства": кнопки и клавиатура - touch pad и пр.) - в таком смысле и сейчас верен именно этот вариант. Однако сейчас термин "сенсор" расширенно стал применяться и в значении "датчик" (видимо, связано с переводами).
Датчики используются во многих отраслях экономики — добыче и переработке полезных ископаемых, промышленном производстве, транспорте, коммуникациях, логистике, строительстве, сельском хозяйстве, здравоохранении, науке и других отраслях — являясь в настоящее время неотъемлемой частью технических устройств.
В последнее время в связи с удешевлением электронных систем все чаще применяются датчики со сложной обработкой сигналов, возможностями настройки и регулирования параметров и стандартным интерфейсом системы управления. Имеется определенная тенденция расширительной трактовки и перенесения этого термина на измерительные приборы, появившиеся значительно ранее массового использования датчиков, а также по аналогии — на объекты иной природы, например, биологические.
Датчики по своему назначению и технической реализации близки к понятию «измерительный инструмент» («измерительный прибор»). Однако показания приборов воспринимаются человеком, как правило, напрямую (посредством дисплеев, табло, панелей, световых и звуковых сигналов и проч.), в то время как показания датчиков требуют преобразования в форму, в которой измерительная информация может быть воспринята человеком. Датчики могут входить в состав измерительных приборов, обеспечивая измерение физической величины, результаты которого затем преобразуются для восприятия оператором измерительного прибора.
В автоматизированных системах управления датчики могут выступать в роли инициирующих устройств, приводя в действие оборудование, арматуру и программное обеспечение. Показания датчиков в таких системах, как правило, записываются на запоминающее устройство для контроля, обработки, анализа и вывода на дисплей или печатающее устройство. Огромное значение датчики имеют в робототехнике, где они выступают в роли рецепторов, посредством которых роботы и другие автоматические устройства получают информацию из окружающего мира и своих внутренних органов.
В быту датчики используются в термостатах, выключателях, термометрах, барометрах, смартфонах, посудомоечных машинах, кухонных плитах, тостерах, утюгах и другой бытовой технике.
| Первичная категория | Вторичная категория | Тип датчика |
|---|---|---|
| Пространственные характеристики | Местоположение Наличие объекта Расстояние Ориентация |
Датчик GPS Магнитометр Датчик присутствия объекта Пассивный инфракрасный датчик Датчик близости объекта Датчик линейного положения Датчик углового положения Датчик наклона Гироскоп Акселерометр Датчик вибрации |
| Механические характеристики | Колебания Сила Ввод данных человеком |
Датчик вибрации Датчик усилия Сенсорный датчик Сенсорный экран |
| Характеристики текучих сред | Жидкость Газ/жидкость Газ |
Датчик уровня жидкости Датчик скорости потока жидкости Датчик давления Датчик концентрации газа Датчик скорости потока газа |
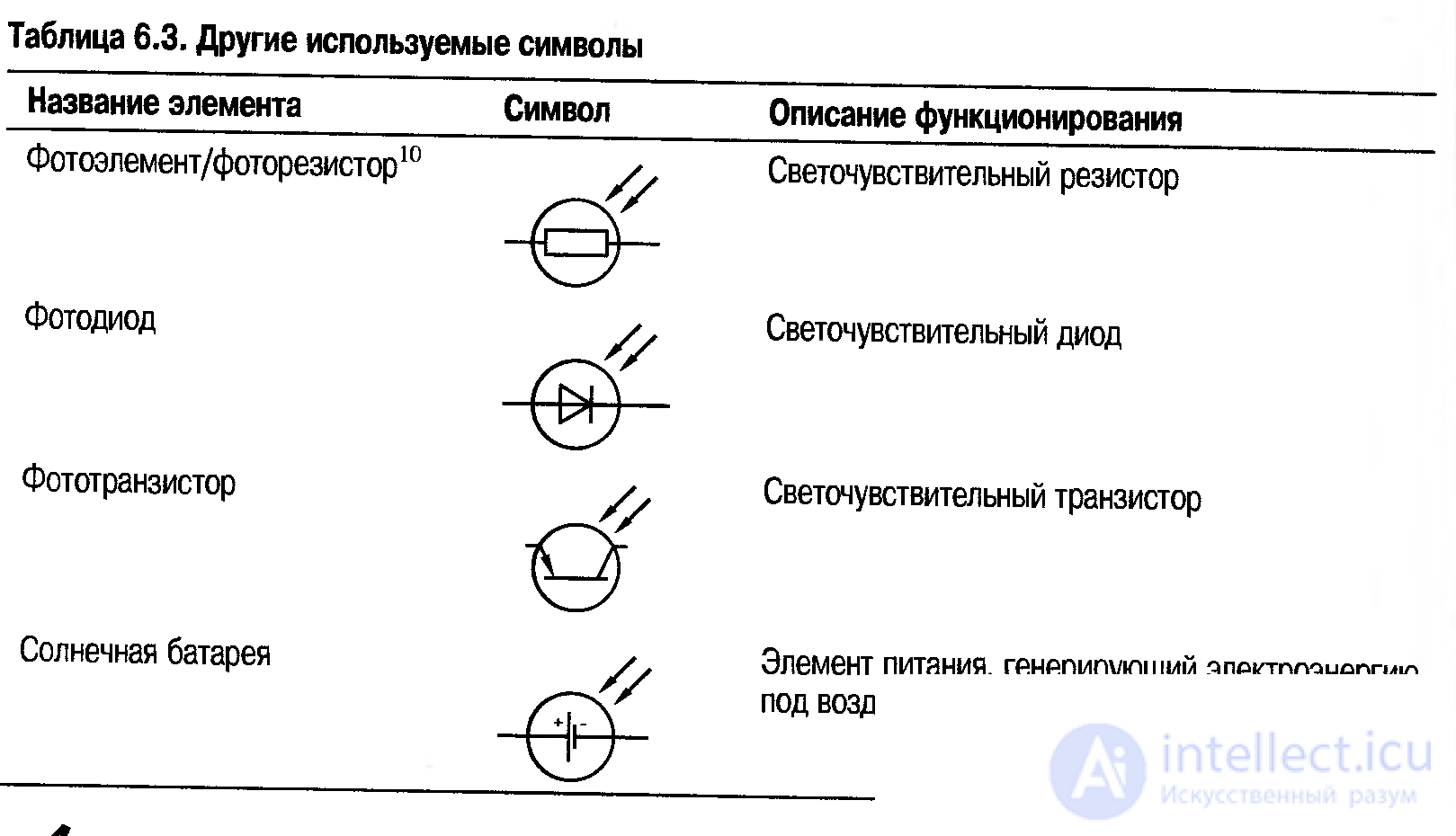
| Характеристики излучения | Свет Тепло Звук |
Фоторезистор Фотодиод Фототранзистор Термистор с отрицательным температурным коэффициентом Термистор с положительным температурным коэффициентом Термопара Резистивный датчик температуры Полупроводниковый датчик температуры Инфракрасный датчик температуры Микрофон |
| Электрические характеристики | Ток Напряжение |
Датчик тока (амперматр) Датчик напряжения (вольтметр) |
 |
круг диаметром 10 мм изображает датчик, а также вторичный прибор и другие устройства, установленные по месту; |
 |
круг диаметром 10 мм с диаметральной линией обозначает приборы и устройства, установленные на пульте или на щите; |
 |
круг диаметром 5 мм обозначает исполнительный механизм; |

|
регулирующие органы в виде задвижек, заслонок, регулирующих клапанов обозначаются по ГОСТу, принятому в системах ТГВ. Здесь изображен, в качестве примера, регулирующий клапан |
Буквенные обозначения регулируемых и контролируемых величин:
T – температура;
P – давление;
F – расход;
L – уровень;
Q – качество.
Рядом с буквой Q указывается параметр качества. Например,  – датчик, вторичный прибор, измеряющий дозу кислорода, растворенного в воде. Параметр качества указывается вверху рядом с буквой. Другие примеры обозначения качественного параметра:
– датчик, вторичный прибор, измеряющий дозу кислорода, растворенного в воде. Параметр качества указывается вверху рядом с буквой. Другие примеры обозначения качественного параметра:  ,
,  ,
,  ,
,  .
.
Буквенные обозначения функций приборов:
I – индикации;
R – регистрации;
C – регулирования;
A – сигнализации.
Буквенные обозначения датчиков, вторичных приборов записываются в поле круга в верхнем секторе, нижний сектор предназначен для указания порядковой нумерации. Далее приводятся полные обозначения датчиков и вторичных приборов.
Условные обозначения датчиков, вторичных приборов
и дополнительные условные обозначения
Условные буквенные обозначения электрических датчиков:
TE – температуры;
PE – давления;
FE – расхода;
LE – уровня;
QE – качества.
Условные буквенные обозначения показывающих и регистрирующих приборов:
TIR – температуры;
PIR – давления;
FIR – расхода;
LIR – уровня;
QIR – качества.
Условные буквенные обозначения электрических вторичных регулирующих приборов:
TC – температуры;
PC – давления;
FC – расхода;
LC – уровня;
QC – качества.
В буквенном обозначении могут быть указаны все функции вторичного прибора с указанием параметра. Порядок расположения буквенных обозначений функциональных признаков прибора принимают с соблюдением последовательности обозначений: первая буква – параметр, остальные буквы в порядке I, R, C, A. Если в приборе отсутствует какая-либо функция, то сохраняется порядок расстановки оставшихся букв.
Дополнительные условные обозначения:
NS – блок релейно-контактной аппаратуры;
HS – устройство ручного включения, выключения, переключения;
Y – вычислительное устройство;
D/A – цифро-аналоговый преобразователь;
A/D – аналого-цифровой преобразователь.
Обозначения вида используемой энергии:
E – электрическая энергия;
P – энергия сжатого воздуха;
G – гидравлическая энергия.
пример
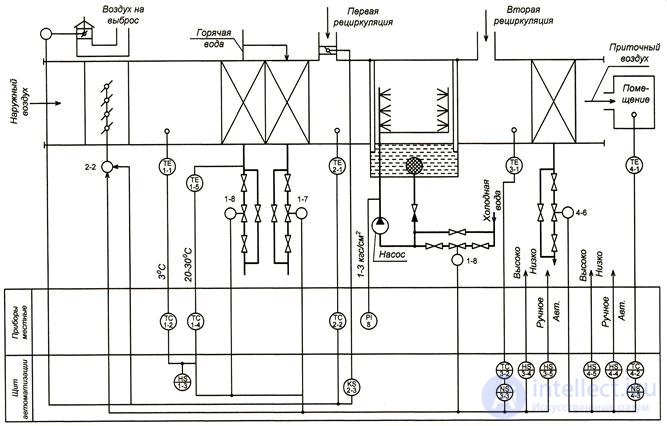
Рис. 2. Технологическая схема автоматизации кондиционера с рециркуляцией
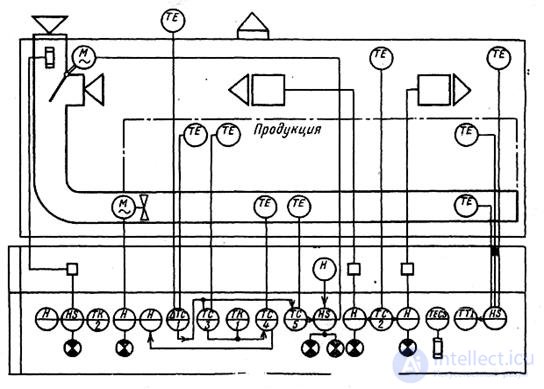 |
Рис. 3 Функциональная схема автоматизации отопительно-вентялиционного оборудования овощехранилища.
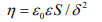
Емкостные датчики используют принцип преобразования линейных или угловых перемещений в изменении емкости конденсатора. Емкость любого
конденсатора
 (10.1)
(10.1)
где ε0 – диэлектрическая проницаемость вакуума (ε0=8,85·10-12 Ф/м); ε - диэлектрическая проницаемость среды между пластинами (между
обкладками конденсатора); S – площадь обкладок конденсатора (м 2 ); δ –з азор между пластинами (м).
Относительная чувствительность плоского емкостного датчика с переменным зазором:
 (10.2)
(10.2)
емкость датчика угловых перемещений:
 (10.3)
(10.3)
где: S – площадь перекрытия обкладок при α=0; α - угол поворота пластин
(обкладок) датчика.
Чувствительность такого датчика:
 (10.4)
(10.4)
откуда видно, что емкость датчика зависит от δ, ε, α т.е. от S(α).
Конструктивно датчики выполняются (см. рис. 10.1.) следующим
образом для измерения линейных перемещений:
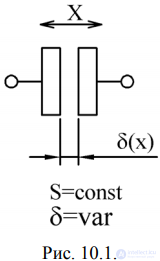
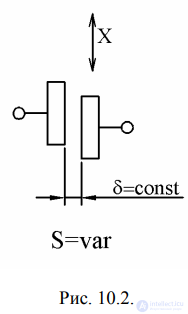
и используются для измерения: малых перемещений; толщины покрытий (до 0,1 мм); давления. Для измерения угловых перемещений (см. рис. 10.2.)
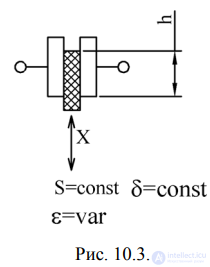
они используются для измерения: малых угловых перемещений (x>1 мм); счета количества изделий. Датчики по схеме рис. 10.3.
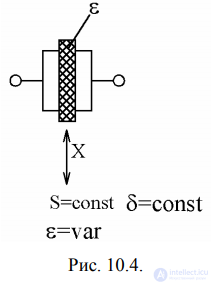
используются для измерения: уровня вещества; счета количества изделий; и в качестве защитной сигнализации, а по схеме рис. 10.4 – используются для измерения: температуры; давления; напряженности электрического поля; определения диэлектрических свойств вещества; уровня радиации
Так как сила электрического поля между обкладками мала, то рассматриваемые датчики находят широкое применение в тех случаях, когда недопустимы большие измерительные усилия. Все емкостные датчики работают на переменном токе повышенной частоты (до 1000 Гц), что является их недостатком, т. к. усложняется схема устройства из-за необходимости устранения паразитной емкости. Наиболее распространенными схемами включения емкостных датчиков являются контурные и мостовые схемы. Мостовые схемы применяются с дифференциальными емкостными преобразователями (см. рис. 10.5.). Это дает возможность получить большую чувствительность при компенсации некоторых вредных внешних факторов (например температуры).
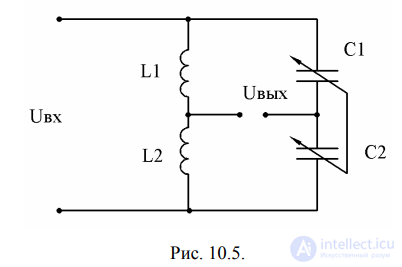
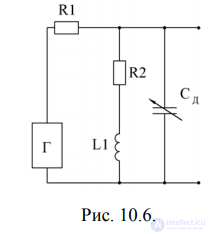
Емкости дифференциального датчика: CC C 1 2 Д Д = +Δ = −Δ иС С C (10.5) включаются в соседние плечи моста, в два других плеча моста включаются или взаимосвязанные индуктивности (L1 и L2) или полуобмотки трансформатора питания (Uвх), или низкоомные резисторы. Сигнал на выходе (Uвых) такого моста практически линейно зависит от изменения емкости датчика. Схема включения емкостного датчика в контурную цепь (рис. 10.6.) содержит LC – контур, емкость СД которого образована датчиком и питается от генератора (Г) стабильной частоты. Вследствие изменения емкости датчика изменяется напряжение на построенном контуре UK=Uвых.
Разновидностью емкостных датчиков является емкостной редуктосин. 90 Индуктивные датчики предназначены для измерения угловых и линейных перемещений. Они питаются от источника переменного тока. Индуктивные датчики не имеют трущихся электрических контактов, поэтому в сравнении с потенциометрическими они более надежны и обладают более высокой чувствительностью. Простейший индуктивный датчик (см. рис. 10.7.) содержит катушку 1, размещенную на сердечнике 2 и подвижный якорь 3 из ферромагнитного материала.
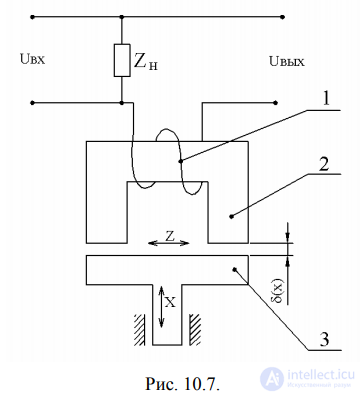
При перемещении в направлении Х изменяется зазор δ и индуктивное сопротивление датчика. Индуктивность простейшего датчика:

где ω - число витков катушки; ZM – полное магнитное сопротивление цепи (1/Гн); RM и XM – активная и реактивная составляющие магнитного сопротивления; Rδ - магнитное сопротивление зазора. А сопротивление зазора:

где: δ – величина воздушного зазора; Sδ – площадь перекрытия магнитопровода (зазора) (м 2 ); μ0 – магнитная проницаемость воздуха (μ0=4·10-7 Гн/м).
Пренебрегая сопротивлением магнитопровода (RM<

Из (8) следует, что индуктивность датчика зависит от величины зазора (δ) нелинейно (см. рис. 10.8.).

Приблизительно, в диапазоне изменений  ( 0 δ – начальные зазор в магнитопроводе), характеристику L f = (δ ) можно считать линейной. Поэтому такие датчики нашли применение для измерения малых перемещений (от единиц мкм до единиц мм). Если якорь датчика перемещается в Z координате (см. рис. 10.3), то его индуктивность линейно зависит от Sδ , т.е. L f = (δ ) – линейна. Такие датчики позволяют измерять перемещения в несколько сантиметров. Для получения линейной характеристики в большом диапазоне изменения зазора ( L f = (δ ) ) используют реверсивные схемы (дифференциальные индуктивные датчики) (см. рис. 10.9.)
( 0 δ – начальные зазор в магнитопроводе), характеристику L f = (δ ) можно считать линейной. Поэтому такие датчики нашли применение для измерения малых перемещений (от единиц мкм до единиц мм). Если якорь датчика перемещается в Z координате (см. рис. 10.3), то его индуктивность линейно зависит от Sδ , т.е. L f = (δ ) – линейна. Такие датчики позволяют измерять перемещения в несколько сантиметров. Для получения линейной характеристики в большом диапазоне изменения зазора ( L f = (δ ) ) используют реверсивные схемы (дифференциальные индуктивные датчики) (см. рис. 10.9.)

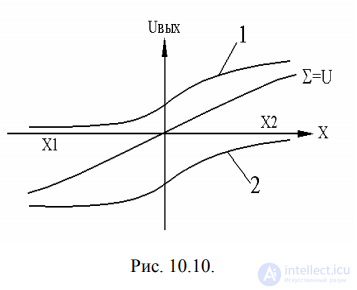
В нем при 1 2 δ = = δ δ , L L 1 2 = Uвых=0; при 1 2 δ ≠ δ Uвых=f(х), причем при переходе через ноль фаза выходного сигнала меняется на 180°. Для такого датчика Uвых=f(х) (см. рис. 10.10.).
Параметры дифференциальных датчиков выбираются исходя из обеспечения линейности Uвых на интервале заданного изменения перемещений. Чувствительность простейшего индуктивного датчика:

а также:

чувствительность дифференциального индуктивного датчика примерно в два раза выше чем у простейшего. С точки зрения динамики индуктивные датчики рассматриваются как безынерционные звенья. Индукционные датчики с переменной площадью зазора более универсальны, чем с переменным зазором. Они находят широкое применение в авиации, т. к. удовлетворительно работают при частоте бортовой сети электропитания. Частоты питающих напряжений не превышают 5 кГц, т. к. на более высоких частотах возникают потери на перемагничивание. Для измерения угловых перемещений используются дифференциальные трансформаторные датчики с поворотным движением якоря (см. рис. 10.11.).
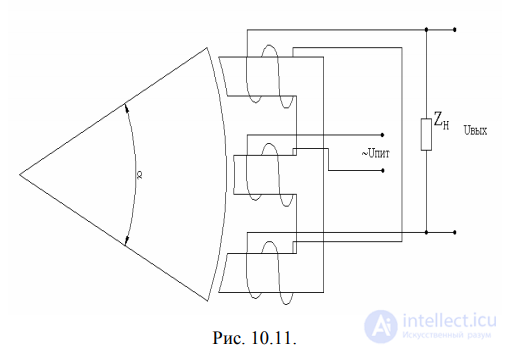
При отклонении якоря от нулевого положения, когда Uвых=0, Uвых меняет фазу на 180° и Uвых=f(x) достаточно линейно, но зависит от Zн и при наличии в нагрузке реактивной составляющей приобретает нелинейность, а выходной синусоидальный сигнал искажается. Электротепловые датчики используются для измерения температуры и преобразуют изменение температуры в изменение электрической величины:
ЭДС или сопротивления. В зависимости от выходной величины они делятся
на термопары и термосротивления.
Принцип действия термопары основан на термоэлектрическом эффекте,
который состоит в том, что в спае двух разнородных проводников при
нагревании появляется ЭДС, значение которой зависит от материалов
проводников и от температуры спая.
Для измерения температуры (-200 металлическими термоэлектродами (рис. 10.12.). Значение термо ЭДС для
различных типов термопар колеблется от десятых долей до десятков
милливольт. Так, ЭДС для термопар:
Медь-Константан E = ° =− − ° 4,3 100 , 6,18 260 (при C E ) (при С) ,
Медь-Золото-Кобальт E = 0,86 20 , 9,87 270 (при ° =− − ° C E ) (при С),
Вольфрам-Молибден Е= до 3,8,
Вольфрам-Тантал Е= до 20,0,
Вольфрам-Рений Е= до 30,0.

Чувствительность термопар y
, где ΔE – изменение термо-ЭДС при изменении температуры Δt . Для измерения высоких температур нашли применение термопары из тугоплавких металлов и сплавов:
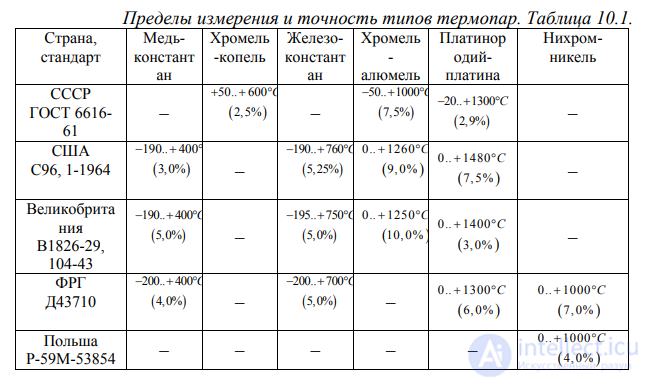
вольфрам-Молибден 1300÷2400 ºС, вольфрам-Тантал 400÷2000 ºС, вольфрам-Рений 0÷2500 ºС, вольфрам-вольфрам молибден 1000÷2900 ºС. Промышленностью СССР и за рубежом применяются термопары по указанным ниже (см. табл. 10.1.) стандартам:
Для различных типов термопар чувствительность различна и неодинакова при разных температурах горячего спая.
Информация, изложенная в данной статье про датчики , подчеркивают роль современных технологий в обеспечении масштабируемости и доступности. Надеюсь, что теперь ты понял что такое датчики, сенсоры, виды датчиков, sensors и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Датчики и сенсоры, Технические измерения и измерительные приборы
Комментарии
Оставить комментарий
Датчики и сенсоры, Технические измерения и измерительные приборы
Термины: Датчики и сенсоры, Технические измерения и измерительные приборы