Лекция
Привет, Вы узнаете о том , что такое механических сенсоров, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое механических сенсоров, механический сенсор , настоятельно рекомендую прочитать все из категории Датчики и сенсоры, Технические измерения и измерительные приборы .
механических сенсорах первичные сигналы о состоянии исследуемого объекта или процесса имеют механическую природу. Это могут быть: изменение формы и/или размеров тел; изменение их взаимного расположения, т.е. механическое перемещение; изменение скорости движения; возникновение ускорений; изменение амплитуды, фазы или частоты механических колебаний и т.п. Соответственно есть смысл подразделять механические сенсоры с учетом физической природы чувствительных элементов и первичных информационных сигналов, которые в них возникают, на следующие виды:
деформационные сенсоры, первичными сигналами в которых являются изменения формы, объема или размеров чувствительного элемента;
сенсоры линейного перемещения, первичным сигналом в которых является перемещение центра массы тела в пространстве;
сенсоры углового перемещения, первичными сигналами в которых являются наклон тела, поворот, вращение;
акселерометры, в которых первичным сигналом является возникновение механического ускорения;
вибрационные сенсоры, в которых первичным сигналом является изменение состояния механических колебаний тела или системы тел;
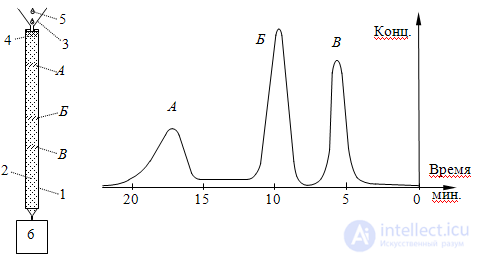
хроматографические сенсоры, первичные сигналы в которых появляются вследствие механического перемещения молекул (жидкости, газа) сквозь пористую среду.
.3.1. Деформационные чувствительные элементы
Наиболее известными деформационными чувствительными элементами являются деформационные чувствительные элементы для измерения температуры, силы и давления. В производственных условиях для слежения за температурой с целью ее регулирования преимущество обычно отдают биметаллическим чувствительным элементам. Они представляют собой биметаллические полоски, которые состоят из двух прочно соединенных между собой слоев металлов с существенно отличающимися температурными коэффициентами линейного расширения (ТКЛР). При повышении температуры один из металлов удлиняется больше, другой – меньше. В результате биметаллическая полоска выгибается в сторону металла с меньшим ТКЛР
При измерениях давления жидкости или газа в качестве чувствительных элементов часто используют механические устройства, которые деформируются под действием давления. Наиболее употребительные из них – сильфоны, мембраны и упругие трубки.
Для измерения веса и силы часто используют и другой деформационный чувствительный элемент – пружину. Пружины в качестве чувствительного элемента используют обычно лишь в пределах линейной упругой деформации, когда выполняется известный закон Гука:

(2.1)
где  – коэффициент упругости,
– коэффициент упругости,  – приложенная сила,
– приложенная сила,  – длина ненагруженной пружины,
– длина ненагруженной пружины,  – величина растяжения или сжатия пружины.
– величина растяжения или сжатия пружины.
При применении микросистемных технологий из всех выше перечисленных деформационных элементов проще всего реализовать мембраны. Им обычно и отдают предпочтение. Непосредственно в кремниевой мембране формируют и кремниевые тензорезисторы, которые преобразуют механическую деформацию в электрические сигналы. Рядом с миниатюрной мембраной в том же кристалле кремния формируют также и микросхемы, требуемые для считывания и электронной обработки сигналов
3.2. Сенсоры линейного перемещения
Известным видом механических чувствительных элементов, в которых первичный сигнал появляется в форме линейного перемещения, являются поршни.. На одной стороне подвижного поршня в герметически закрытой части цилиндра находится газ, а с другой стороны – среда, в которой измеряется давление. Это может быть тоже газ или жидкость. Когда измеряемое давление возрастает, подвижный поршень перемещается, сжимая газ в закрытой части цилиндра до тех пор, пока его давление не уравняется с внешним. Когда измеряемое давление уменьшается, то поршень перемещается в противоположном направлении до достижения нового состояния равновесия
Следующим известным механическим чувствительным элементом с линейным перемещением является поплавок.. В датчиках уровня жидкости используют тот факт, что поплавок перемещается вместе с перемещением поверхности жидкости. А его перемещения могут быть разными способами преобразованы в электрические, визуальные или другие виды сигналов.
Например, небольшие постоянные магниты размещены в теле поплавка. В каждый момент срабатывает лишь тот переключатель, который располагается внутри поплавка и поэтому подвержен действию магнитов. Сопротивление электрической цепи прямо зависит от местоположения поплавка и, следовательно, – от уровня жидкости.
Для измерения плотности жидкостей часто применяют ареометры. Ареометр состоит из полой стеклянной, металлической или пластмассовой капсулы к которой прикреплена тонкая "шейка" со шкалой . Капсулу заполняют дробью с таким расчетом, чтобы капсула была полностью погружена в контролируемую жидкость, но не тонула в ней, а плавала, и часть шейки со шкалой выступала над поверхностью жидкости. Согласно закону Архимеда условие плавания ареометра имеет вид:

 – масса ареометра,
– масса ареометра,  – ускорение силы тяжести,
– ускорение силы тяжести,  – плотность жидкости,
– плотность жидкости,  – объем части ареометра, погруженной в жидкость.
– объем части ареометра, погруженной в жидкость. используют капиллярные трубки, в которых высота поднятия или опускания столбика жидкости h определяется величиной поверхностного натяжения и плотностью
используют капиллярные трубки, в которых высота поднятия или опускания столбика жидкости h определяется величиной поверхностного натяжения и плотностью  жидкости:
жидкости:
 – диаметр капилляра,
– диаметр капилляра,  – ускорение силы тяжести.
– ускорение силы тяжести.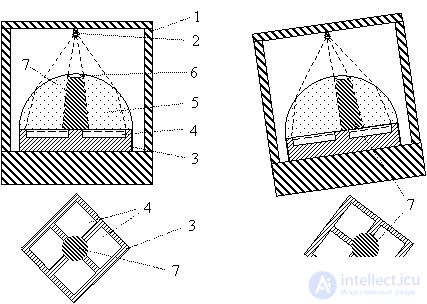
 кольцевых дорожек с прозрачными и непрозрачными участками.. Свет свободно проходит сквозь прозрачные участки дорожек и, попав на соответствующие фотодетекторы, вызывает появление сигнала "1" на выходах соответствующих усилителей. Сквозь непрозрачные участки дорожек свет не проходит, и на выходах соответствующих усилителей формируются сигналы "0".
кольцевых дорожек с прозрачными и непрозрачными участками.. Свет свободно проходит сквозь прозрачные участки дорожек и, попав на соответствующие фотодетекторы, вызывает появление сигнала "1" на выходах соответствующих усилителей. Сквозь непрозрачные участки дорожек свет не проходит, и на выходах соответствующих усилителей формируются сигналы "0".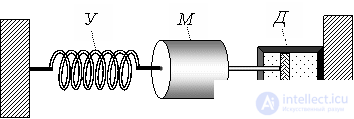
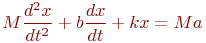
 – отклонение инертной массы М от положения равновесия;
– отклонение инертной массы М от положения равновесия;  – коэффициент затухания, обусловленный демпфированием;
– коэффициент затухания, обусловленный демпфированием;  – коэффициент жесткости упругого элемента;
– коэффициент жесткости упругого элемента;  – текущее ускорение объекта, на котором установлен акселерометр.
– текущее ускорение объекта, на котором установлен акселерометр. колебания вокруг нового положения равновесия не возникают. Чтобы определить ускорение
колебания вокруг нового положения равновесия не возникают. Чтобы определить ускорение  , достаточно измерить отклонение
, достаточно измерить отклонение  от положения равновесия или силу
от положения равновесия или силу  , которая действует на упругий элемент.
, которая действует на упругий элемент.
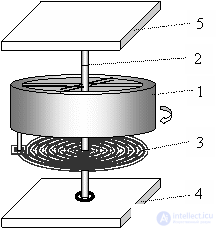
 на угол поворота, а линейное ускорение – на угловое ускорение. Роль демпфера играет регулируемый момент сил трения между осью ротора и опорами. Измеряя угол закручивания или момент силы на упругом элементе, можно определить величину углового ускорения.
на угол поворота, а линейное ускорение – на угловое ускорение. Роль демпфера играет регулируемый момент сил трения между осью ротора и опорами. Измеряя угол закручивания или момент силы на упругом элементе, можно определить величину углового ускорения.

 – исходная частота колебаний (МГц);
– исходная частота колебаний (МГц);  – прирост массы (г);
– прирост массы (г);  – площадь электрода пьезокристалла (см2).
– площадь электрода пьезокристалла (см2).

 – в Гц;
– в Гц;  –в кг;
–в кг;  – в м2.
– в м2.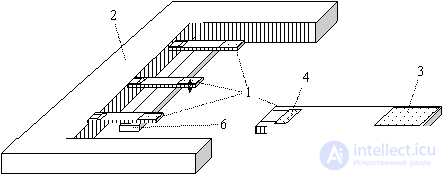






Комментарии