Лекция
Привет, Вы узнаете о том , что такое лидар, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое лидар, light detection and ranging, lidar , настоятельно рекомендую прочитать все из категории Датчики и сенсоры, Технические измерения и измерительные приборы .
лидар ( также ЛИДАР , аббревиатура от «light discovery and range» [ 1 ] или «laser imaging, discovery, and range» [ 2 ] ) — это метод определения расстояний путем наведения лазера на объект или поверхность и измерения времени , необходимого для возвращения отраженного света к приемнику. Лидар может работать в фиксированном направлении (например, вертикальном) или сканировать в нескольких направлениях, используя специальную комбинацию трехмерного сканирования и лазерного сканирования . [ 3 ]

Лидарное изображение кургана «Марширующие Медведи», Национальный памятник «Эффиджи-Маундс» , США
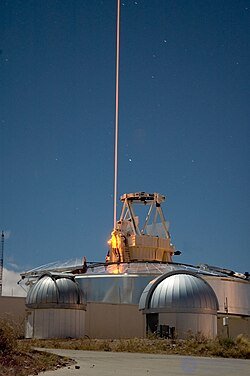
Источник оптического излучения с добавлением частоты (FASOR), используемый на оптическом полигоне Starfire для лидарных и лазерных экспериментов со звездами-опознавателями, настроен на линию натрия D2a и используется для возбуждения атомов натрия в верхних слоях атмосферы .

Этот лидар может использоваться для сканирования зданий, скальных образований и т.д. для создания 3D-моделей. Лидар может направлять лазерный луч в широком диапазоне: его головка вращается по горизонтали, а зеркало наклоняется по вертикали. Лазерный луч используется для измерения расстояния до первого объекта на своем пути.
Лидар имеет наземные, воздушные и мобильные приложения. Он обычно используется для создания карт высокого разрешения, с приложениями в геодезии , геоматике , археологии , географии , геологии , геоморфологии , сейсмологии , лесном хозяйстве , физике атмосферы, [ 6 ] лазерном наведении , воздушном лазерном картографировании полос (ALSM) и лазерной альтиметрии . Он используется для создания цифровых 3-D представлений областей на поверхности Земли и океанского дна приливной и прибрежной зоны путем изменения длины волны света. Он также все чаще используется для управления и навигации для автономных автомобилей и для вертолета Ingenuity в его рекордных полетах над поверхностью Марса . [ 8 ] С тех пор лидар широко используется для атмосферных исследований и метеорологии . Лидарные приборы, установленные на самолетах и спутниках, выполняют геодезическую и картографическую съемку. Недавним примером является экспериментальный передовой бортовой исследовательский лидар Геологической службы США. НАСА определило лидар как ключевую технологию для обеспечения автономной точной безопасной посадки будущих роботизированных и пилотируемых лунных аппаратов.
Развитие квантовых технологий привело к появлению квантовых лидаров, демонстрирующих более высокую эффективность и чувствительность по сравнению с традиционными лидарными системами.
Основная концепция лидара была разработана Э. Х. Синджем в 1930 году, который предполагал использование мощных прожекторов для исследования атмосферы.
Под руководством Малкольма Стича компания Hughes Aircraft Company представила первую систему, подобную лидару, в 1961 году, вскоре после изобретения лазера. Эта система, предназначенная для слежения за спутниками, сочетала в себе лазерную фокусировку изображения с возможностью расчета расстояний путем измерения времени возвращения сигнала с помощью соответствующих датчиков и электроники сбора данных. Первоначально она называлась «Colidar» — аббревиатура от «coherent light Detecting and Rangeing» (обнаружение и определение дальности когерентного света), образованная от термина « radar » (радар), который сам по себе является аббревиатурой от «radio detect and range» (обнаружение и определение дальности радиоволн). Все лазерные дальномеры , лазерные высотомеры и лидарные блоки являются производными от ранних систем «Colidar».
Первым практическим наземным применением системы колидар стал «Колидар Марк II» — большой лазерный дальномер винтовочного типа, выпущенный в 1963 году, имевший дальность действия 11 км и точность 4,5 м, который использовался для военного наведения.Первое упоминание слова «лидар» как отдельного слова в 1963 году предполагает, что оно произошло от словосочетания « свет » и «радар»: «В конечном итоге лазер может стать чрезвычайно чувствительным детектором определенных длин волн от удаленных объектов. В то же время он используется для изучения Луны с помощью «лидара» (светового радара)...» Название « фотонный радар » иногда используется для обозначения дальномера в видимом спектре, как и лидар.
Первые применения лидара были в метеорологии, где Национальный центр атмосферных исследований использовал его для измерения облаков и загрязнения. Широкая общественность узнала о точности и полезности лидарных систем в 1971 году во время миссии Аполлон-15 , когда астронавты использовали лазерный высотомер для картирования поверхности Луны. Хотя английский язык больше не рассматривает слово «радар» как аббревиатуру (т. е. пишется с маленькой буквы), слово «лидар» писалось с большой буквы «ЛИДАР» в некоторых публикациях, начиная с 1980-х годов. Единого мнения о заглавных буквах не существует. Различные публикации называют лидар «ЛИДАР», . Геологическая служба США использует как «ЛИДАР», так и «лидар», иногда в одном и том же документе; New York Times в основном использует «лидар» для статей, написанных сотрудниками, хотя другие новостные ленты, такие как Reuters, могут использовать лидар.
Эксперименты по лазерной локации Луны в СССР начались в 1963 году, а с 1973 года велись систематические наблюдения всех пяти расположенных к тому времени на Луне уголковых отражателей («Лунохода-1», «Лунохода-2», «Аполлона-11», «Аполлона-14», «Аполлона-15»)[17]:263,267,272. Для лазерной локации искусственных спутников Земли в СССР были запущены спутники с уголковыми отражателями на борту: «Интеркосмос-17» (1977), «Интеркосмос-Болгария-1300» (советско-болгарский, 1981), «Метеор-3» (1985), использовался разработанный советскими учеными лазерный дальномер «Крым»[18]:321,323.
В СССР существовало два семейства лидарных метеорологических приборов, предназначенных для использования на аэродромах (в обоих семействах в качестве источника зондирующего светового потока использовались импульсные лампы):

Длины волн варьируются в зависимости от цели: от примерно 10 микрометров ( инфракрасный ) до примерно 250 нанометров ( ультрафиолетовый ). Обычно свет отражается посредством обратного рассеяния , в отличие от чистого отражения, которое можно обнаружить с помощью зеркала. Различные типы рассеяния используются для различных применений лидара: чаще всего это релеевское рассеяние , рассеяние Ми , комбинационное рассеяние и флуоресценция . [ 6 ] Подходящие комбинации длин волн позволяют проводить дистанционное картирование атмосферного содержимого путем выявления зависящих от длины волны изменений интенсивности возвращенного сигнала. [ 27 ] Название «фотонный радар» иногда используется для обозначения дальномера в видимом спектре, например, лидара, хотя фотонный радар более строго относится к радиочастотному дальномеру с использованием фотонных компонентов.
Лидар определяет расстояние до объекта или поверхности по формуле :

где c — скорость света , d — расстояние между детектором и обнаруживаемым объектом или поверхностью, а t — время, необходимое лазерному лучу для прохождения до обнаруживаемого объекта или поверхности, а затем обратно к детектору.
Существует два типа схем лидарного обнаружения: «некогерентное» или прямое энергетическое обнаружение (которое, в основном, измеряет изменения амплитуды отраженного света) и когерентное обнаружение (лучше всего подходит для измерения доплеровских сдвигов, или изменений фазы отраженного света). Когерентные системы обычно используют оптическое гетеродинное обнаружение . [ 29 ] Это более чувствительно, чем прямое обнаружение, и позволяет им работать на гораздо меньшей мощности, но требует более сложных приемопередатчиков.
Оба типа используют импульсные модели: либо микроимпульсные , либо высокоэнергетические . Микроимпульсные системы используют прерывистые всплески энергии. Они были разработаны в результате постоянно растущей мощности компьютеров в сочетании с достижениями в области лазерных технологий. Они используют значительно меньшую энергию лазера, как правило, порядка одного микроджоуля , и часто «безопасны для глаз», то есть их можно использовать без мер предосторожности. Высокомощные системы широко распространены в атмосферных исследованиях, где они широко используются для измерения атмосферных параметров: высоты, слоистости и плотности облаков, свойств облачных частиц ( коэффициент ослабления , коэффициент обратного рассеяния, деполяризация ), температуры, давления, ветра, влажности и концентрации следовых газов (озона, метана, закиси азота и т. д.).

В отличие от радиоволн, эффективно отражающихся только от достаточно крупных металлических целей, световые волны подвержены рассеянию в любых средах, в том числе в воздухе, поэтому возможно не только определять расстояние до непрозрачных (отражающих свет) дискретных целей, но и фиксировать интенсивность рассеивания света в прозрачных средах. Возвращающийся отраженный сигнал проходит через ту же рассеивающую среду, что и луч от источника, подвергается вторичному рассеиванию, поэтому восстановление действительных параметров распределенной оптической среды — достаточно сложная задача, решаемая как аналитическими, так и эвристическими методами.
Простейшая лидарная система включает в себя лазерный дальномер, отраженный вращающимся зеркалом (вверху). Лазер сканирует оцифровываемую сцену в одном или двух измерениях (в центре), собирая данные о расстоянии через заданные угловые интервалы (внизу).
Основные различия в конструкциях и принципах действия современных лидаров заключаются в модулях формирования развертки. Развертка может формироваться как механическими методами (с помощью вращающихся зеркал или с помощью движения микроэлектромеханических систем), так и с помощью фазированной антенной решетки[19].

Длины волн, излучаемые наиболее распространенными лазерами. Шкала в микрометрах
В абсолютном большинстве конструкций излучателем служит лазер, формирующий короткие импульсы света высокой мгновенной мощности. Периодичность следования импульсов или модулирующая частота выбираются так, чтобы пауза между двумя последовательными импульсами была не меньше, чем время отклика от обнаружимых целей (которые могут физически находиться дальше, чем расчетный радиус действия прибора). Выбор длины волны зависит от функции лазера и требований к безопасности и скрытности прибора; наиболее часто применяются Nd:YAG-лазеры и длины волн (в нанометрах):
Также возможно использование (см. Промышленные и сервисные роботы) вместо коротких импульсов непрерывной амплитудной модуляции излучения переменным напряжением.
Большинство современных лидаров используют цилиндрическую развертку. Этот тип развертки наиболее просто формируется и прост в дальнейшей обработке. Однако у него есть недостатки. Например, при использовании цилиндрической развертки есть вероятность пропустить узкие горизонтальные объекты (такие как шлагбаум). Чаще всего эта проблема решается применением дополнительного лидара с цилиндрической разверткой, но ориентированного перпендикулярно первому лидару.
Помимо цилиндрической развертки существуют лидары с разверткой «розетка» (англ. «Rosette scanning pattern»). Формирование данной развертки происходит сложнее, чем формирование цилиндрической развертки, однако лидары с разверткой «розетка» не испытывают проблем, описанных выше.

Два черных цилиндра, вынесенные перед бампером — сканирующие лидары беспилотного автомобиля
Простейшие атмосферные лидарные системы не имеют средств наведения и направлены вертикально в зенит.
Для сканирования горизонта в одной плоскости применяются простые сканирующие головки. В них неподвижные излучатель и приемник также направлены в зенит; под углом 45° к горизонту и линии излучения установлено зеркало, вращающееся вокруг оси излучения. В авиационных установках, где надо сканировать полосу, перпендикулярную направлению полета самолета-носителя, ось излучения — горизонтальна. Для синхронизации мотора, вращающего зеркало, и средств обработки принимаемого сигнала используются точные датчики положения ротора, а также неподвижные реперные риски, наносимые на прозрачный кожух сканирующей головки.
Сканирование в двух плоскостях добавляет к этой схеме механизм, поворачивающий зеркало на фиксированный угол с каждым оборотом головки — так формируется цилиндрическая развертка окружающего мира. При наличии достаточной вычислительной мощности можно использовать жестко закрепленное зеркало и пучок расходящихся лучей — в такой конструкции один «кадр» формируется за один оборот головки.
Производить сканирование можно также и с помощью микроэлектромеханических систем. Такие системы позволяют значительно сократить габариты и повысить надежность изделий.
Лазеры с длиной волны 600–1000 нм чаще всего используются в ненаучных целях. Максимальная мощность лазера ограничена, или используется система автоматического отключения, которая отключает лазер на определенной высоте, чтобы обеспечить безопасность глаз людей на земле.
Одна из распространенных альтернатив, лазеры с длиной волны 1550 нм, безопасны для глаз при относительно высокой мощности, поскольку эта длина волны сильно поглощается водой и едва достигает сетчатки, хотя сенсоры камер все еще могут быть повреждены. Однако компромисс заключается в том, что современная технология детекторов менее продвинута, поэтому эти длины волн обычно используются на больших расстояниях с меньшей точностью. Они также используются в военных целях, поскольку длина волны 1550 нм не видна в очках ночного видения , в отличие от более короткого инфракрасного лазера с длиной волны 1000 нм.
В лидарах для топографического картирования на воздушном судне обычно используются лазеры YAG с диодной накачкой длиной волны 1064 нм , в то время как в батиметрических системах (глубинные исследования) обычно используются лазеры YAG с диодной накачкой и удвоенной частотой длиной волны 532 нм, поскольку излучение с длиной волны 532 нм проникает в воду с гораздо меньшим затуханием , чем излучение с длиной волны 1064 нм. Настройки лазера включают частоту повторения импульсов (которая определяет скорость сбора данных). Длительность импульса обычно определяется длиной резонатора лазера, количеством проходов, необходимых для усиления материала (YAG, YLF и т. д.), и скоростью модуляции добротности (импульсной частоты). Лучшее разрешение цели достигается с помощью более коротких импульсов при условии, что детекторы и электроника лидара имеют достаточную полосу пропускания.
Фазированная решетка может освещать любое направление, используя микроскопическую решетку отдельных антенн. Управление синхронизацией (фазой) каждой антенны направляет целостный сигнал в определенном направлении. Фазированные решетки используются в радарах с 1940-х годов. Для получения диаграммы направленности определенного размера в определенном направлении используется порядка миллиона оптических антенн. Для достижения этого фаза каждой отдельной антенны (излучателя) точно контролируется. Использовать ту же технологию в лидаре крайне сложно, если вообще возможно. Основные проблемы заключаются в том, что все отдельные излучатели должны быть когерентными (технически исходить от одного и того же «задающего» генератора или лазерного источника), иметь размеры, близкие к длине волны излучаемого света (диапазон 1 мкм), чтобы действовать как точечный источник, а их фазы должны контролироваться с высокой точностью.
Микроэлектромеханические зеркала (МЭМС) не являются полностью твердотельными. Однако их миниатюрный форм-фактор обеспечивает многие из тех же преимуществ с точки зрения стоимости. Один лазер направлен на одно зеркало, которое можно переориентировать для обзора любой части целевого поля. Зеркало вращается с высокой скоростью. Однако МЭМС-системы, как правило, работают в одной плоскости (слева направо). Для добавления второго измерения обычно требуется второе зеркало, которое движется вверх и вниз. В качестве альтернативы, другой лазер может попадать на то же зеркало под другим углом. МЭМС-системы могут быть повреждены ударами/вибрациями и могут потребовать повторной калибровки.
Скорость формирования изображения зависит от скорости сканирования. Для сканирования по азимуту и углу места используются два осциллирующих плоских зеркала, комбинация с полигональным зеркалом и двухкоординатный сканер . Выбор оптики влияет на угловое разрешение и дальность обнаружения. Для сбора отраженного сигнала можно использовать зеркало с отверстием или светоделитель .
В лидарах используются две основные технологии фотодетекторов : твердотельные фотодетекторы, такие как кремниевые лавинные фотодиоды , или фотоумножители . Чувствительность приемника — еще один параметр, который необходимо сбалансировать при проектировании лидара.
Лидарные датчики, установленные на мобильных платформах, таких как самолеты или спутники, требуют использования измерительных приборов для определения абсолютного положения и ориентации датчика. Такие устройства обычно включают в себя приемник глобальной системы позиционирования ( GPS) и инерциальный измерительный блок (ИИБ).
Активная фазированная антенная решетка формирует лазерный луч множеством передающих модулей, каждый из которых генерирует излучение со своими параметрами. Таким образом можно управлять направлением луча. Применение ФАР в лидарах позволяет избавиться от подвижных частей и таким образом продлить срок жизни изделию.
Важную роль играет динамический диапазон приемного тракта. Например, приемный тракт новейшей (2006 год) подсистемы машинного зрения MuCAR-3 с динамическим диапазоном 1:106 обеспечивает эффективный радиус действия от 2 до 120 м (всего 1:60). Чтобы избежать перегрузки приемника интенсивной засветкой от рассеивания в «ближней зоне», в системах дальнего радиуса действия применяют высокоскоростные механические затворы, физически блокирующие приемный оптический канал. В устройствах ближнего радиуса со временем отклика менее микросекунды такой возможности нет.
Лидар использует активные датчики, которые обеспечивают собственный источник освещения. Источник энергии попадает на объекты, а отраженная энергия обнаруживается и измеряется датчиками. Расстояние до объекта определяется путем регистрации времени между переданным и отраженным импульсами и использования скорости света для расчета пройденного расстояния. [ 33 ] Вспышечный лидар позволяет получать трехмерные изображения благодаря способности камеры испускать более мощную вспышку и определять пространственные соотношения и размеры интересующей области с помощью отраженной энергии. Это обеспечивает более точное изображение, поскольку полученные кадры не нужно сшивать, а система нечувствительна к движению платформы. Это приводит к меньшим искажениям. [ 34 ]
3D-визуализацию можно осуществлять как с помощью сканирующих, так и несканирующих систем. «3D-лазеpный радар со стробируемым обзором» — это несканирующая лазерная система дальнометрии, использующая импульсный лазер и быстродействующую камеру со стробируемым обзором. Начались исследования виртуального управления лучом с использованием технологии цифровой обработки света (DLP).
Лидар для визуализации также может быть реализован с использованием массивов высокоскоростных детекторов и массивов чувствительных к модуляции детекторов, обычно построенных на отдельных кристаллах с использованием технологий изготовления комплементарных металл-оксид-полупроводников (КМОП) и гибридных КМОП/ приборов с зарядовой связью (ПЗС). В этих устройствах каждый пиксель выполняет некоторую локальную обработку, такую как демодуляция или стробирование на высокой скорости, понижая частоту сигналов до видеочастоты, так что массив может считываться как камера. Используя эту технологию, можно одновременно захватывать многие тысячи пикселей/каналов. [ 35 ] Высокоразрешающие 3-D лидарные камеры используют гомодинное детектирование с электронным затвором ПЗС или КМОП . [ 36 ]
Когерентный лидар для формирования изображений использует синтетическую решетку гетеродинного обнаружения , чтобы позволить направленному приемнику с одним элементом действовать так, как если бы он был решеткой для формирования изображений. Об этом говорит сайт https://intellect.icu . [ 37 ]
В 2014 году лаборатория Линкольна анонсировала новый чип для получения изображений с более чем 16 384 пикселями, каждый из которых способен снимать один фотон, что позволяет им захватывать большую область на одном изображении. Более раннее поколение технологии с одной четвертью пикселей было отправлено военными США после землетрясения на Гаити в январе 2010 года. Один пролет бизнес-джета на высоте 3000 м (10 000 футов) над Порт-о-Пренсом позволил сделать мгновенные снимки 600 м2 (2000 футов) квадратов города с разрешением 30 см (1 фут), отображая точную высоту щебня, разбросанного по городским улицам. [ 38 ] Новая система в десять раз лучше и может производить гораздо большие карты быстрее. Чип использует арсенид индия-галлия (InGaAs), который работает в инфракрасном спектре на относительно большой длине волны, что обеспечивает более высокую мощность и большую дальность действия. Во многих приложениях, таких как беспилотные автомобили, новая система снизит затраты, поскольку не требует механического компонента для нацеливания чипа. InGaAs использует менее опасные длины волн, чем традиционные кремниевые детекторы, работающие в видимом диапазоне длин волн. [ 39 ] Новые технологии для инфракрасных лидаров с однофотонным счетом стремительно развиваются, включая массивы и камеры на различных полупроводниковых и сверхпроводниковых платформах. [ 40 ]
Лидар может быть ориентирован в надир , зенит или горизонтально. Например, лидарные высотомеры смотрят вниз, атмосферные лидары — вверх, а лидарные системы предотвращения столкновений — вбок.
Лазерными проекциями лидаров можно манипулировать, используя различные методы и механизмы для создания эффекта сканирования: стандартный шпиндельный тип, который вращается, обеспечивая обзор на 360 градусов; твердотельный лидар, который имеет фиксированное поле зрения, но не имеет движущихся частей и может использовать как МЭМС, так и оптические фазированные решетки для управления лучами; и импульсный лидар, который распространяет вспышку света по большому полю зрения, прежде чем сигнал отразится обратно к детектору. [ 41 ]
Применение лидаров можно разделить на воздушное и наземное. [ 42 ] Для обоих типов требуются сканеры с различными характеристиками в зависимости от цели сбора данных, размера области, которую необходимо охватить, желаемого диапазона измерений, стоимости оборудования и т. д. Также возможны космические платформы, см. спутниковую лазерную альтиметрию .
Воздушный лидар (также воздушное лазерное сканирование ) — это когда лазерный сканер, будучи прикрепленным к самолету во время полета, создает трехмерную модель облака точек ландшафта. В настоящее время это самый подробный и точный метод создания цифровых моделей рельефа , заменяющий фотограмметрию . Одним из основных преимуществ по сравнению с фотограмметрией является возможность отфильтровывать отражения от растительности из модели облака точек для создания цифровой модели рельефа , которая представляет собой поверхности земли, такие как реки, тропы, объекты культурного наследия и т. д., которые скрыты деревьями. В категории воздушных лидаров иногда проводится различие между высотными и низковысотными применениями, но главное отличие заключается в снижении как точности, так и плотности точек данных, полученных на больших высотах. Воздушный лидар также может использоваться для создания батиметрических моделей на мелководье. [ 43 ]
Основными компонентами воздушного лидара являются цифровые модели рельефа (ЦМР) и цифровые модели поверхности (ЦМП). Точки и точки на поверхности земли представляют собой векторы дискретных точек, в то время как ЦМР и ЦМП представляют собой интерполированные растровые сетки дискретных точек. Процесс также включает в себя получение цифровых аэрофотоснимков. Для интерпретации глубоких оползней, например, под покровом растительности, уступов, трещин растяжения или поваленных деревьев используется воздушный лидар. Цифровые модели рельефа воздушного лидара позволяют видеть сквозь полог леса, выполнять детальные измерения уступов, эрозии и наклона опор линий электропередач. [ 44 ]
Данные воздушного лидара обрабатываются с помощью набора инструментов под названием Toolbox for Lidar Data Filtering and Forest Studies (TIFFS) [ 45 ] для фильтрации лидарных данных и изучения рельефа. Данные интерполируются в цифровые модели рельефа с помощью программного обеспечения. Лазер направляется на область, которую нужно отобразить, и высота каждой точки над землей рассчитывается путем вычитания исходной z-координаты из соответствующей высоты цифровой модели рельефа. На основе этой высоты над землей получаются данные без растительности, которые могут включать такие объекты, как здания, линии электропередач, летящие птицы, насекомые и т. д. Остальные точки рассматриваются как растительность и используются для моделирования и картографирования. На каждом из этих участков лидарные метрики рассчитываются путем вычисления статистических данных, таких как среднее значение, стандартное отклонение, асимметрия, процентили, среднее квадратическое и т. д. [ 45 ]

Лидарное сканирование с помощью беспилотного летательного аппарата (БПЛА)
В настоящее время на рынке представлено множество коммерческих лидарных систем для беспилотных летательных аппаратов . Эти платформы могут систематически сканировать большие площади или служить более дешевой альтернативой пилотируемым самолетам для сканирования небольших объемов. [ 46 ]
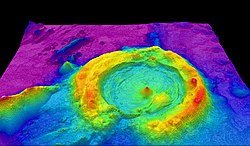
Технология батиметрии с помощью бортового лидара — карта многолучевого лидара высокого разрешения, демонстрирующая впечатляющие разломы и деформации морского дна, в затененном рельефе и раскрашенная по глубине.
Батиметрическая технологическая система воздушного лидара включает измерение времени прохождения сигнала от источника до его возвращения к датчику. Метод сбора данных включает компонент картирования морского дна и компонент наземного контроля, включающий видеотрансекты и отбор проб. Система работает с использованием лазерного луча зеленого спектра (532 нм). [ 47 ] Два луча проецируются на быстро вращающееся зеркало, которое создает
продолжение следует...
Часть 1 Лидары Light Detection and Ranging «обнаружение и определение дальности с помощью света»)
Часть 2 Приложения - Лидары Light Detection and Ranging «обнаружение и определение
Часть 3 Варианты - Лидары Light Detection and Ranging «обнаружение и определение
Исследование, описанное в статье про лидар, подчеркивает ее значимость в современном мире. Надеюсь, что теперь ты понял что такое лидар, light detection and ranging, lidar и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Датчики и сенсоры, Технические измерения и измерительные приборы

Комментарии