Лекция
Привет, мой друг, тебе интересно узнать все про надежные методы, тогда с вдохновением прочти до конца. Для того чтобы лучше понимать что такое надежные методы , настоятельно рекомендую прочитать все из категории Робототехника.
С неопределенностью можно также справиться, используя так называемые надежные, а не вероятностные методы. Надежным называется такой метод, в котором подразумевается наличие ограниченного объема неопределенности в каждом аспекте задачи, но не присваиваются вероятности значениям в пределах разрешенного интервала. Надежным называется такое решение, которое приводит к намеченной цели независимо от того, какие значения данных встречаются в действительности, при условии, что они находятся в пределах предполагаемого интервала. Крайней формой надежного метода является подход на основе совместимого планирования— в нем вырабатываются планы, выполнимые даже без учета информации о состоянии.
Рассматривается один из надежных методов, применяемый для планирования тонких движений (или сокращенно FMP — Fine-Motion Planning) в задачах робототехнической сборки. Планирование тонких движений обеспечивает перемещение манипулятора робота в очень тесной близости от объекта в статической среде. Основная сложность, связанная с планированием тонких движений, состоит в том, что требуемые движения и соответствующие характеристики среды очень малы. В таких малых масштабах робот теряет возможность точно измерять или управлять своим положением, кроме того, может возникать неопределенность в отношении формы самой среды; предполагается, что все эти неопределенности ограничены. Решением задачи FMP обычно становится условный план (или политика), в котором используется обратная связь отдатчиков и который гарантирует успешное выполнение во всех ситуациях, совместимых с предполагаемыми пределами неопределенности.
План проведения тонких движений представляет собой определение рядаохраняемых движений. Каждое охраняемое движение состоит, во-первых, из команды движения и, во-вторых, из условия завершения, которое представляет собой предикат, заданный на сенсорных значениях робота, и возвращает истинное значение в качестве указания на окончание охраняемого движения. Команды движения обычно задают приспособляемые движения, которые позволяют роботу выполнять скользящие движения, если другие команды движения вызовут столкновение с препятствием. В качестве примера на рисунке 1 показано двухмерное пространство конфигураций с узким вертикальным отверстием. Такое пространство конфигураций может возникнуть при решении задачи вставки прямоугольного колышка в отверстие, немного превышающее его по размерам. Об этом говорит сайт https://intellect.icu . Команды движения выполняются с постоянными скоростями. Условиями завершения являются ситуации контакта с поверхностью. Для моделирования неопределенности в процессе управления предположим, что фактически движение робота происходит не в направлении, указанном в команде, а укладывается в конус Cv вокруг этого направления. На рисунке 1 показано, что произойдет, если будет выдана команда движения с постоянной скоростью строго в вертикальном направлении из исходной области s. Из-за неопределенности в скорости робот может совершать движения в любом направлении в пределах конической огибающей; возможно, что это приведет к попаданию в отверстие, но с большей вероятностью колышек опустится с той или другой стороны от него. А поскольку робот не будет иметь информации о том, с какой стороны от отверстия опустился колышек, то не будет знать, куда его двигать дальше.
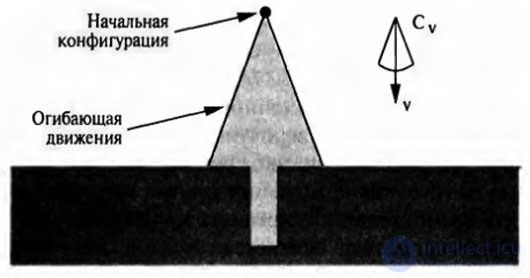
Рисунок 1. Двухмерная среда, конус неопределенности скорости и огибающая возможных движений робота. Намеченная скорость равна v, но из-за неопределенности фактическая скорость может находиться в пределах Cv, а это приводит к тому, что окончательная конфигурация может определиться в любой точке внутри огибающей движения. Это означает, что возникает неопределенность в отношении того, удастся ли попасть в отверстие или нет
Более приемлемая стратегия показана на рисунке 2 и 3. На рисунке 2
приведен пример того, как робот намеренно направляет свое движение в определенную сторону от отверстия. Условия выполнения команды движения показаны на рисунке, а проверкой окончания движения становится контакт с любой поверхностью. На рисунке 3 показано, что выдается команда движения, которая вынуждает робота передвигать колышек, скользящий по поверхности, до его попадания в отверстие. Тем самым предполагается использование команды приспособляемого движения. Поскольку все возможные скорости в огибающей движения направлены влево, робот должен передвинуть скользящий по поверхности колышек вправо после вступления его в контакт с горизонтальной поверхностью. Вслед за прикосновением колышка с правой вертикальной стенкой отверстия колышек должен проскользнуть вниз, поскольку все возможные скорости направлены вниз относительно этой вертикальной поверхности. Колышек будет продолжать двигаться до тех пор, пока не достигнет дна отверстия, поскольку именно таково условие завершения этого движения. Несмотря на неопределенность управления, все возможные траектории движения робота оканчиваются контактом с дном отверстия, разумеется, при условии, что не обнаружатся какие-либо дефекты поверхности, из-за которых робот не сможет сдвинуть с места застрявший колышек.
Рисунок 2. Перва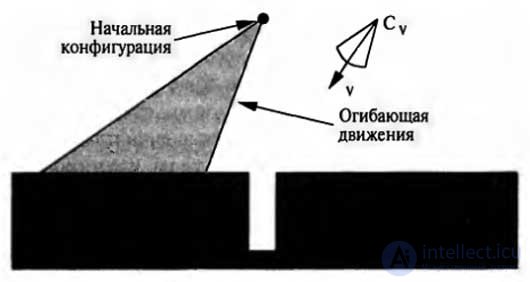 я команда движения и полученная в итоге огибающая возможных движений робота. Независимо от любых погрешностей, известно, что в окончательной конфигурации колышек будет находиться слева от отверстия
я команда движения и полученная в итоге огибающая возможных движений робота. Независимо от любых погрешностей, известно, что в окончательной конфигурации колышек будет находиться слева от отверстия
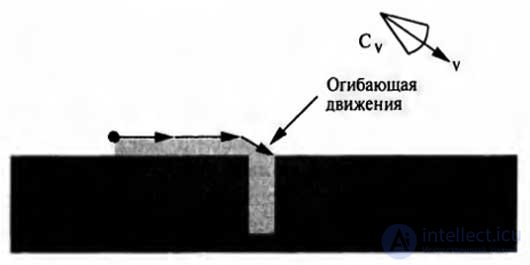
Рисунок 3. Вторая команда движения и огибающая возможных движений. Даже при наличии погрешностей колышек в конечном итоге оказывается в отверстии
Вполне очевидно, что задача конструирования планов тонких движений не тривиальна; в действительности она намного сложнее по сравнению с задачей планирования в условиях точных движений. Для решения этой задачи можно либо выбирать постоянное количество дискретных значений для каждого движения, либо использовать геометрию среды для выбора направлений, позволяющих определить качественно иное поведение. Планировщик тонких движений принимает в качестве входных данных описание пространства конфигураций, угол наклона конуса неопределенности скоростей и спецификацию возможных сенсорных восприятий, определяющих ситуацию завершения (в данном случае — контакт с поверхностью). В свою очередь, планировщик должен выработать многоэтапный условный план (или политику), позволяющий добиться гарантированного успеха, если подобный план существует.
В рассматриваемом примере предполагается, что планировщик имеет в своем распоряжении точную модель среды, но возможно также принять допущение о наличии ограниченной погрешности в этой модели, как показано ниже. Если погрешность может быть описана в терминах параметров, то соответствующие параметры добавляются в качестве степеней свободы в пространство конфигураций. В частности, в последнем примере, если бы была неопределенность в отношении глубины и ширины отверстия, то можно было бы добавить эти величины в пространство конфигураций как две степени свободы. Из этого не следует, что появится возможность передвигать захват робота непосредственно в направлении этих степеней свободы в пространстве конфигураций или получать информацию об их позиции. Но оба эти ограничения можно учесть, описывая задачу как задачу FMP, задавая соответствующим образом данные о неопределенностях средств управления и датчиков. В результате возникает сложная, четырехмерная задача планирования, но появляется возможность применять точно такие же методы планирования, как и раньше. Следует отметить, что надежный подход такого рода приводит к созданию планов, в которых учитываются результаты самого неблагоприятного развития событий, а не максимизируется ожидаемое качество плана, в отличие от методов теории решений. Единственным оптимальным аспектом планов действий в наиболее неблагоприятной ситуации (с точки зрения теории решений) является то, что они позволяют предотвратить последствия неудачи во время выполнения плана, намного худшие по сравнению с любыми другими затратами, связанными с его выполнением.
Если я не полностью рассказал про надежные методы? Напиши в комментариях Надеюсь, что теперь ты понял что такое надежные методы и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Из статьи мы узнали кратко, но содержательно про надежные методы
Комментарии
Оставить комментарий
Робототехника
Термины: Робототехника