Лекция
Это продолжение увлекательной статьи про беспилотный летательный аппарат.
...
/ data-auto-open loading="lazy" alt="Беспилотный летательный аппарат (БЛА, БПЛА,беспилотник,дрон) Квадрокоптер">
Самолеты одного типа с экипажем и без экипажа, как правило, имеют идентичные физические компоненты. Основное исключение - это кабина экипажа и система экологического контроля или системы жизнеобеспечения . Некоторые БПЛА несут полезную нагрузку (например, камеру), которая весит значительно меньше, чем взрослый человек, и в результате может быть значительно меньше. Несмотря на то, что они несут большую полезную нагрузку, вооруженные военные БЛА легче, чем их аналоги с экипажем и сопоставимым вооружением.
Небольшие гражданские БПЛА не имеют жизненно важных систем и, следовательно, могут быть построены из более легких, но менее прочных материалов и форм, и могут использовать менее надежные электронные системы управления. Для небольших БПЛА стала популярной конструкция квадрокоптера , хотя эта компоновка редко используется для самолетов с экипажем. Миниатюризация означает, что можно использовать менее мощные двигательные технологии, которые невозможны для самолетов с экипажем, такие как небольшие электродвигатели и батареи.
Системы управления БПЛА часто отличаются от систем управления кораблями с экипажем. Для дистанционного управления человеком камера и видеосвязь почти всегда заменяют окна кабины; радиопередачи цифровых команд заменяют физические органы управления кабиной. Программное обеспечение автопилота используется как на самолетах с экипажем, так и без экипажа, с различными наборами функций.
Основное отличие самолетов - отсутствие зоны кабины и ее окон. Бесхвостые квадрокоптеры являются обычным форм-фактором для вертолетных БПЛА, в то время как хвостовые моно- и двухкоптеры - обычными для платформ с экипажем. [60]
В небольших БПЛА в основном используются литий-полимерные батареи (Li-Po), а в более крупных транспортных средствах часто используются обычные авиационные двигатели или водородные топливные элементы . Масштаб или размер самолета не являются определяющей или ограничивающей характеристикой энергоснабжения БПЛА. Плотность энергии современных Li-Po аккумуляторов намного меньше, чем у бензиновых или водородных. Рекорд путешествий БПЛА (построенного из пробкового дерева и майларовой кожи) через Северную часть Атлантического океана принадлежит бензиновой модели самолета или БПЛА. Манард Хилл в книге «В 2003 году, когда одно из его творений пролетело 1882 мили через Атлантический океан на менее чем галлоне топлива», держит этот рекорд. См .: [61]Электроэнергия используется, так как для полета требуется меньше работы, а электродвигатели тише. Кроме того, при правильной конструкции соотношение тяги к весу электрического или бензинового двигателя, приводящего в движение воздушный винт, может зависать или подниматься вертикально. Самолет Botmite является примером электрического БПЛА, способного взбираться по вертикали. [62]
Схема исключения батареи (BEC) используется для централизации распределения энергии и часто содержит микроконтроллер (MCU). Более дорогостоящее переключение BEC снижает нагрев платформы.
Вычислительные возможности БПЛА последовали за развитием вычислительной техники, начиная с аналогового управления и эволюционировав в микроконтроллеры, затем систему на кристалле (SOC) и одноплатные компьютеры (SBC).
Системное оборудование для небольших БЛА часто называют контроллером полета (FC), платой контроллера полета (FCB) или автопилотом.
Датчики положения и движения дают информацию о состоянии самолета. Экстероцептивные датчики имеют дело с внешней информацией, такой как измерения расстояния, в то время как экспроприоцептивные датчики коррелируют внутренние и внешние состояния. [63]
Не взаимодействующие датчики могут обнаруживать цели автономно, поэтому они используются для обеспечения разделения и предотвращения столкновений. [64]
Степени свободы (DOF) относятся как к количеству, так и к качеству датчиков на борту: 6 DOF подразумевают 3-осевые гироскопы и акселерометры (типичный инерциальный измерительный блок - IMU), 9 DOF относятся к IMU плюс компас, 10 DOF добавляет барометр и 11 степеней свободы обычно добавляет приемник GPS. [65]
Приводы БПЛА включают в себя цифровые электронные контроллеры скорости (которые контролируют частоту вращения двигателей), связанные с двигателями / двигателями и пропеллерами , серводвигателями (в основном для самолетов и вертолетов), оружием, исполнительными механизмами полезной нагрузки, светодиодами и динамиками.
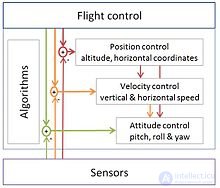
Программное обеспечение БПЛА называется полетным стеком или автопилотом. Целью полетного стека является получение данных от датчиков, управляющих двигателей для обеспечения устойчивости БПЛА и облегчения связи с наземным управлением и планированием миссии. [66]
БПЛА - это системы реального времени , которые требуют быстрого реагирования на изменение данных датчиков. В результате беспилотные летательные аппараты полагаются на одноплатные компьютеры для выполнения своих вычислительных задач. Примеры таких одноплатных компьютеров включают Raspberry Pis , Beagleboards и т. Д. , Защищенные NavIO , PXFMini и т. Д. Или разработанные с нуля, такие как NuttX , превентивная RT Linux , Xenomai , Orocos-Robot Operating System или DDS-ROS 2.0 .
| Слой | Требование | Операции | пример |
|---|---|---|---|
| Прошивка | Критичный ко времени | От машинного кода до выполнения процессора, доступ к памяти | ArduCopter-v1, px4 |
| Промежуточное ПО | Критичный ко времени | Управление полетом, навигация, радиоуправление | Cleanflight, ArduPilot |
| Операционная система | Компьютерно-интенсивный | Оптический поток, обход препятствий, SLAM, принятие решений | ROS, Nuttx, дистрибутивы Linux, Microsoft IOT |
Стекы с открытым исходным кодом для гражданского использования включают:
Из-за того, что программное обеспечение БПЛА имеет открытый исходный код, его можно настроить для конкретных приложений. Например, исследователи из Технического университета Кошице заменили алгоритм управления автопилотом PX4 по умолчанию. [67] Эта гибкость и совместные усилия привели к появлению большого количества различных стеков с открытым исходным кодом, некоторые из которых являются ветвями других, например CleanFlight, который является ветвлением BaseFlight и из которого созданы три других стека.
БПЛА используют архитектуры управления с открытым, закрытым или гибридным контуром.
БПЛА можно запрограммировать для выполнения агрессивных маневров или посадки / усаживания на наклонных поверхностях [69], а затем для подъема в направлении более удобных мест связи. [70] Некоторые БПЛА могут управлять полетом с помощью различной модели полета [71] [72], например, конструкции VTOL.
БПЛА также могут сидеть на плоской вертикальной поверхности. [73]
Большинство БПЛА используют радио для дистанционного управления и обмена видео и другими данными . Ранние БПЛА имели только узкополосный канал связи. Нисходящие каналы появились позже. Эти двунаправленные узкополосные радиолинии передавали удаленному оператору данные управления и контроля (C&C) и телеметрические данные о состоянии систем самолета. Для полетов на очень большие расстояния военные БПЛА также используют спутниковые приемники в составе спутниковых навигационных систем. В случаях, когда требуется передача видео, БПЛА будут реализовывать отдельную аналоговую радиолинию видео.
В большинстве современных приложений БПЛА требуется передача видео. Таким образом, вместо двух отдельных каналов для C&C, телеметрии и видеотрафика используется широкополосный канал для передачи всех типов данных по одному радиоканалу. Эти широкополосные каналы могут использовать методы качества обслуживания для оптимизации трафика C&C для уменьшения задержки. Обычно эти широкополосные каналы несут трафик TCP / IP, который может быть маршрутизирован через Интернет.
Радиосигнал со стороны оператора может исходить из:
По мере того, как с годами производительность и надежность мобильных сетей увеличивались, дроны начали использовать мобильные сети для связи. Мобильные сети могут использоваться для слежения за дронами, удаленного пилотирования, обновления по воздуху [80] и облачных вычислений. [81]
Современные сетевые стандарты явно рассматривают дроны и поэтому включают оптимизацию. Стандарт 5G требует сокращения задержки в плоскости пользователя до 1 мс при использовании сверхнадежной связи с малой задержкой. [82]
продолжение следует...
Часть 1 Беспилотный летательный аппарат (БЛА, БПЛА,беспилотник,дрон) Квадрокоптер
Часть 2 - Беспилотный летательный аппарат (БЛА, БПЛА,беспилотник,дрон) Квадрокоптер
Часть 3 Автономия - Беспилотный летательный аппарат (БЛА, БПЛА,беспилотник,дрон) Квадрокоптер
Часть 4 - Беспилотный летательный аппарат (БЛА, БПЛА,беспилотник,дрон) Квадрокоптер
Часть 5 Основные принципы - Беспилотный летательный аппарат (БЛА, БПЛА,беспилотник,дрон) Квадрокоптер
Часть 6 - Беспилотный летательный аппарат (БЛА, БПЛА,беспилотник,дрон) Квадрокоптер
Часть 7 Функции - Беспилотный летательный аппарат (БЛА, БПЛА,беспилотник,дрон) Квадрокоптер
Часть 8 - Беспилотный летательный аппарат (БЛА, БПЛА,беспилотник,дрон) Квадрокоптер
Часть 9 Применение беспилотных летательных аппаратов - Беспилотный летательный аппарат (БЛА, БПЛА,беспилотник,дрон)
Часть 10 Вау!! 😲 Ты еще не читал? Это зря! - Беспилотный летательный аппарат (БЛА, БПЛА,беспилотник,дрон) Квадрокоптер
Исследование, описанное в статье про беспилотный летательный аппарат, подчеркивает ее значимость в современном мире. Надеюсь, что теперь ты понял что такое беспилотный летательный аппарат, бла, бпла, беспилотник, дрон, квадрокоптер и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Комментарии
Оставить комментарий
Робототехника
Термины: Робототехника