Лекция
Привет, мой друг, тебе интересно узнать все про роботы, тогда с вдохновением прочти до конца. Для того чтобы лучше понимать что такое роботы, робототехника, робот , настоятельно рекомендую прочитать все из категории Робототехника.
робот отехника (от робот и техника; англ. robotics — роботика, роботехника) — прикладная наука, занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой развития производства.
Робототехника опирается на такие дисциплины, как электроника, механика, кибернетика, телемеханика, мехатроника, информатика, а также радиотехника и электротехника. Выделяют строительную, промышленную, бытовую, медицинскую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.
Слово «роботика» (или «роботехника», «robotics») было впервые использовано в печати Айзеком Азимовым в научно-фантастическом рассказе «Лжец», опубликованном в 1941 году.
В основу слова «робототехника» легло слово «робот», придуманное в 1920 г. чешским писателем Карелом Чапеком и его братом Йозефом для научно-фантастической пьесы Карела Чапека «Р. У. Р.» («Россумские универсальные роботы »), впервые поставленной в 1921 г. и пользовавшейся успехом у зрителей. В ней хозяин завода налаживает выпуск множества андроидов, которые сначала работают без отдыха, но потом восстают и губят своих создателей .
Слово «робототехника» (в его английском варианте «robotics») было впервые использовано в печати Айзеком Азимовым в научно-фантастическом рассказе «Лжец», опубликованном в 1941 г.
В основу слова «робототехника» легло слово «робот», придуманное в 1920 г. чешским писателем Карелом Чапеком для своей научно-фантастической пьесы «Р. У. Р.» («Россумские универсальные роботы»), впервые поставленной в 1921 г. и пользовавшейся успехом у зрителей. В ней хозяин завода налаживает выпуск множества андроидов, которые сначала работают без отдыха, но потом восстают и губят своих создателей.
Впрочем, некоторые идеи, положенные позднее в основу робототехники, появились еще в античную эпоху — задолго до введения перечисленных выше терминов. Так, в «Илиаде» Гомера говорится, что бог Гефест сделал из золота говорящих служанок, придав им разум (т. е. — на современном языке — искусственный интеллект) и силу. Древнегреческому механику и инженеру Архиту Тарентскомуприписывают создание механического голубя, способного летать (ок. 400 г. до н. э.). Множество подобных сведений содержится в книге«Робототехника: История и перспективы» И. М. Макарова и Ю. И. Топчеева, представляющей собой популярный и обстоятельный рассказ о роли, которую сыграли (и еще сыграют) роботы в истории развития цивилизации.
Роботы — это физические агенты, которые выполняют поставленные перед ними задачи, проводя манипуляции в физическом мире. Для этой цели роботов оснащаютисполнительными механизмами, такими как ноги, колеса, шарниры и захваты. Исполнительные механизмы имеют единственное назначение — прилагать физические усилия к среде. Кроме того, роботов оснащают датчиками, которые позволяют им воспринимать данные об окружающей их среде. В современных роботах применяются различные виды датчиков, включая те, что предназначены для измерения характеристик среды (например, видеокамеры и ультразвуковые дальномеры), и те, которые измеряют характеристики движения самого робота (например, гироскопы и акселерометры).
Некоторые идеи, положенные позднее в основу робототехники, появились еще в античную эпоху — задолго до введения перечисленных выше терминов. Найдены остатки движущихся статуй, изготовленных в I веке до нашей эры . В «Илиаде» Гомера говорится, что бог Гефест сделал из золота говорящих служанок, придав им разум (то есть — на современном языке — искусственный интеллект) и силу . Древнегреческому механику и инженеру Архиту Тарентскому приписывают создание механического голубя, способного летать (ок. 400 г. до н. э.) . Более двух тысяч лет назад Герон Александрийский создал водяной автомат «Поющая птица» и ряд систем подвижных фигур для античных храмов . В 270 году древнегреческий изобретатель Ктесибий изобрел особые водяные часы, получившие название клепсидра (или «крадущие время»), которые своим хитроумным устройством вызвали значительный интерес современников . В 1500 году великий Леонардо да Винчи разработал механический аппарат в виде льва, который должен был открывать герб Франции при въезде короля в город. В XVIII веке швейцарским часовщиком П. Жаке-Дрозом была создана механическая кукла «Писец», которая могла быть запрограммирована с помощью кулачковых барабанов на написание текстовых сообщений, содержащих до 40 букв . В 1801 году французский коммерсант Жозеф Жаккар представил передовую по тем временам конструкцию ткацкого станка, который можно было «программировать» с помощью специальных карт с отверстиями для воспроизведения на вытканных полотнах повторяющихся декоративных узоров. В начале XIX века эта идея была позаимствована английским математиком Чарлзом Бэббиджем для создания одной из первых автоматических вычислительных машин . Примерно к 30-м годам XX века появились андроиды, реализующие элементарные движения и способные произносить по команде человека простейшие фразы. Одной из первых таких разработок стала конструкция американского инженера Д. Уэксли, созданная для Всемирной выставки в Нью-Йорке в 1927 году .
В 50-х годах XX века появились механические манипуляторы для работы с радиоактивными материалами. Они были способны копировать движения рук оператора, который находился в безопасном месте. К 1960-му году были проведены разработки дистанционно управляемых колесных платформ с манипулятором, телекамерой и микрофоном для обследования и сбора проб в зонах повышенной радиоактивности .
Широкое внедрение промышленных станков с числовым программным управлением стало стимулом для создания программируемых манипуляторов, используемых для погрузки и разгрузки станочных систем. В 1954 году американским инженером Д. Деволом был запатентован метод управления погрузочно-разгрузочным манипулятором с помощью сменных перфокарт, как следствие в 1956 году совместно с Д. Энгельбергером им была создана первая в мире промышленная компания «Юнимейшн» (англ. Unimation от Universal Automation) по производству промышленной робототехники. В 1962 году вышли в свет первые в США промышленные роботы «Версатран» и «Юнимейт», причем некоторые из них функционируют до сих пор, преодолев порог в 100 тысяч часов рабочего ресурса. Если в этих ранних системах соотношение затрат на электронику и механику составляло 75 % к 25 %, то в настоящее время оно изменилось на противоположное. При этом, конечная стоимость электроники продолжает неуклонно снижаться. Появление в 1970-х годах недорогих микропроцессорных систем управления, которые заменили специализированные блоки управления роботов на программируемые контроллеры способствовало снижению стоимости роботов примерно в три раза. Это послужило стимулом для их массового распространения по всем отраслям промышленного производства .
Множество подобных сведений содержится в книге «Робототехника: История и перспективы» И. М. Макарова и Ю. И. Топчеева, представляющей собой популярный и обстоятельный рассказ о роли, которую сыграли (и еще сыграют) роботы в истории развития цивилизации.
Большинство современных роботов относится к одной из трех основных категорий.Роботы-манипуляторы, или роботы-руки, физически привязаны к своему рабочему месту, например на заводском сборочном конвейере или на борту Международной космической станции. В движении манипулятора обычно участвует вся цепочка управляемых шарниров, что позволяет таким роботам устанавливать свои исполнительные механизмы в любую позицию в пределах своего рабочего пространства. Манипуляторы относятся к типу наиболее распространенных промышленных роботов, поскольку во всем мире установлено свыше миллиона таких устройств. Некоторые мобильные манипуляторы используются в больницах в качестве ассистентов хирургов. Без робототехнических манипуляторов в наши дни не смогут продолжать свою производственную деятельность большинство автомобильных заводов, а некоторые манипуляторы использовались даже для создания оригинальных художественных произведений.
Ко второй категории относятся мобильные роботы. Роботы такого типа передвигаются в пределах своей среды с использованием колес, ног или аналогичных механизмов. Они нашли свое применение при доставке обедов в больницах, при перемещении контейнеров в грузовых доках, а также при выполнении аналогичных задач. Пример мобильного робота — автоматическое наземное транспортноесредство (Unmanned Land Vehicle — ULV) NavLab, способное автономно передвигаться по автомагистралям в режиме самовождения. К другим типам мобильных роботов относятся автоматическое воздушное транспортное средство (Unmanned AirVehicle — UAV), обычно используемое для воздушного наблюдения, химической обработки земельных участков и военных операций, автономное подводное транспортное средство (Autonomous Underwater Vehicle — AUV), используемое в глубоководных морских исследованиях, и планетоход, такой как робот Sojourner, показанный на рисунке а).

Фотографии широко известных роботов: движущийся робот Sojourner агентства NASA, который исследовал поверхность Марса в июле 1997 года (а);

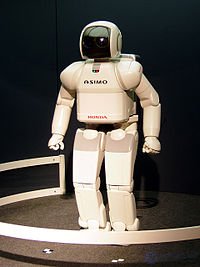
роботы-гуманоиды РЗ и Asimo компании Honda (б)

РОботы компании Boston Dynamics — инженерной компании, специализирующаяся в робототехнике. Известна разработкой по заказу DARPAдля военных целей четвероногого робота BigDog. Выпускаемые виды : BigDog,CHEETAH,LittleDog,RiSE,
PETMAN,Atlas
Handle.

София выступает на международном саммите искусственного интеллекта, МСЭ, Женева, Швейцария, 7-9 июня 2017 года
К третьему типу относятся гибридные устройства — мобильные роботы, оборудованные манипуляторами. В их число входят роботы-гуманоиды, которые по своей физической конструкции напоминают человеческое тело. Два таких робота-гуманоида показаны на рисунке б); оба они изготовлены в японской корпорации Honda. Гибридные роботы способны распространить действие своих исполнительных элементов на более обширную рабочую область по сравнению с прикрепленными к одному месту манипуляторами, но вынуждены выполнять стоящие перед ними задачи с большими усилиями, поскольку не имеют такой жесткой опоры, которую предоставляет узел крепления манипулятора.
К сфере робототехники относятся также протезные устройства (искусственные конечности, ушные и глазные протезы для людей), интеллектуальные системы жизнеобеспечения (например, целые дома, оборудованные датчиками и исполнительными механизмами), а также многотельные системы, в которых робототехнические действия осуществляются с использованием целых полчищ небольших роботов, объединяющих свои усилия.
Реальным роботам обычно приходится действовать в условиях среды, которая является частично наблюдаемой, стохастической, динамической и непрерывной. Некоторые варианты среды обитания роботов (но не все) являются также последовательными и мультиагентными. Частичная наблюдаемость и стохастичность обусловлены тем, что роботу приходится сталкиваться с большим, сложным миром. Робот не может заглянуть за каждый угол, а команды на выполнение движений осуществляются не с полной определенностью из-за проскальзывания приводных механизмов, трения и т.д. Кроме того, реальный мир упорно отказывается действовать быстрее, чем в реальном времени. В моделируемой среде предоставляется возможность использовать простые алгоритмы, чтобы определить с помощью обучения необходимые параметры, осуществляя миллионы попыток в течение всего лишь нескольких часов процессорного времени, а в реальной среде для выполнения всех этих попыток могут потребоваться годы. Об этом говорит сайт https://intellect.icu . Кроме того, реальные аварии, в отличие от моделируемых, действительно наносят ущерб. В применяемые на практике робототехнические системы необходимо вносить априорные знания о роботе, о его физической среде и задачах, которые он должен выполнять для того, чтобы быстро пройти обучение и действовать безопасно.
Можно использовать несколько подходов к классификации роботов — например, по сфере применения, по назначению, по способу передвижения, и пр. По сфере основного применения можно выделить промышленных роботов, исследовательских роботов, роботов, используемых в обучении, специальных роботов.
Важнейшие классы роботов широкого назначения — манипуляционные и мобильные роботы.
Манипуляционный робот — автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций. Такие роботы производятся в напольном, подвесном и портальном исполнениях. Получили наибольшее распространение в машиностроительных и приборостроительных отраслях[10].
Мобильный робот — автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами. Такие роботы могут быть колесными, шагающими и гусеничными (существуют также ползающие, плавающие и летающие мобильные робототехнические системы, см. ниже)[11].
Наиболее распространенными роботами данного класса являются[14][15] четырехколесные и гусеничные роботы. Создаются также роботы, имеющие другое число колес; в этом случае нередко удается упростить конструкцию робота, а также придать ему возможность работать в пространствах, где четырехколесная конструкция оказывается неработоспособной.
Двухколесные роботы, как правило, используют для определения угла наклона корпуса робота и выработки подаваемого на приводы роботов соответствующего управляющего напряжения (с целью обеспечить удержание равновесия и выполнение необходимых перемещений) те или иные гироскопические устройства. Задача удержания равновесия двухколесного робота связана с динамикой обратного маятника[16]. Разработано множество подобных «балансирующих» устройств[17]. К таким устройствам можно отнести Сегвей, который может быть использован, как компонент робота; так, например, сегвей использован как транспортная платформа в разработанном НАСА роботе Робонавт[18].
Одноколесные роботы во многом представляют собой развитие идей, связанных с двухколесными роботами. Для перемещения в 2D пространстве в качестве единственного колеса может использоваться шар, приводимый во вращение несколькими приводами. Несколько разработок подобных роботов уже существуют. Примерами могут служить шаробот разработанный в университете Карнеги — Меллона, шаробот «BallIP», разработанный в университете Тохоку Гакуин (англ. Tohoku Gakuin University)[19], или шаробот Rezero[20], разработанный в Швейцарской высшей технической школе. Роботы такого типа имеют некоторые преимущества, связанные с их вытянутой формой, которые могут позволить им лучше интегрироваться в человеческое окружение, чем это возможно для роботов некоторых других типов[21].
Существует некоторое количество прототипов сферических роботов. Некоторые из них для организации перемещения используют вращение внутренней массы[22][23][24][25]. Роботов подобного типа называют англ. spherical orb robots, англ. orb bot[26] и англ. ball bot[27][28].
В ряде конструкций мобильных колесных роботов используются роликонесущие колеса типа «omnidirectional» («всенаправленные колеса»); такие роботы отличаются повышенной маневренностью[29][30].
Для перемещения по неровным поверхностям, траве и каменистой местности разрабатываются шестиколесные роботы, которые имеют большее сцепление по сравнению с четырехколесными. Еще большее сцепление обеспечивают гусеницы. Многие современные боевые роботы, а также роботы, предназначенные для перемещения по грубым поверхностям, разрабатываются как гусеничные. Вместе с тем, затруднено использование подобных роботов в помещениях, на гладких покрытиях и коврах. Примерами таких роботов могут служить разработанный НАСА робот англ. Urban Robot («Urbie»)[31], разработанные компанией iRobot роботы Warrior и PackBot.
Первые публикации, посвященные теоретическим и практическим вопросам создания шагающих роботов, относятся к 1970—1980-м годам[32][33].
Перемещение робота с использованием «ног» представляет собой сложную задачу динамики. Уже создано некоторое количество роботов, перемещающихся на двух ногах, но эти роботы пока не могут достичь такого устойчивого движения, какое присуще человеку. Также создано множество механизмов, перемещающихся на более чем двух конечностях. Внимание к подобным конструкциям обусловлено тем, что они легче в проектировании[34][35]. Предлагаются также гибридные варианты (как, например, роботы из фильма «Я, робот», способные перемещаться на двух конечностях во время ходьбы и на четырех конечностях во время бега).
Роботы, использующие две ноги, как правило, хорошо перемещаются по полу, а некоторые конструкции могут перемещаться по лестнице. Перемещение по пересеченной местности является сложной задачей для роботов такого типа. Существует ряд технологий, позволяющих перемещаться шагающим роботам:
Под управлением роботом понимается решение комплекса задач, связанных с адаптацией робота к кругу решаемых им задач, программированием движений, синтезом системы управления и ее программного обеспечения[64].
По типу управления робототехнические системы подразделяются на:
Среди основных задач управления роботами выделяют такие[65]:
В развитии методов управления роботами огромное значение имеют достижения технической кибернетики и теории автоматического управления.
Среднее число роботов в мире в 2017 г. составляет 69 на 10 000 работников. Наибольшее число роботов в Южной Корее — 531 на 10 000 работников, Сингапуре — 398, Японии — 305, Германии — 301[66].
Робототехнические комплексы также популярны в области образования как современные высокотехнологичные исследовательские инструменты в области теории автоматического управления и мехатроники. Их использование в различных учебных заведениях среднего и высшего профессионального образования позволяет реализовывать концепцию «обучение на проектах», положенную в основу такой крупной совместной образовательной программы США и Европейского союза, как ILERT. Применение возможностей робототехнических комплексов в инженерном образовании дает возможность одновременной отработки профессиональных навыков сразу по нескольким смежным дисциплинам: механика, теория управления, схемотехника, программирование, теория информации. Востребованность комплексных знаний способствует развитию связей между исследовательскими коллективами. Кроме того, студенты уже в процессе профильной подготовки сталкиваются с необходимостью решать реальные практические задачи.
Популярные робототехнические комплексы для учебных лабораторий:
Существуют и другие. Центр педагогического мастерства Москвы сравнил наиболее популярные платформы и робототехнические конструкторы[67].
Профессия Мобильный робототехник входит в список ТОП-50 самых востребованных профессий по версии Минтруда РФ[68]
Прогнозируется, что объем продаж роботов для образования и науки в 2016—2019 гг. составит 8 млн единиц[69].
Робототехника включена в школьную программу 7-9 классов[70]
На производстве роботы успешно используются уже на протяжении десятилетий. Роботы успешно заменяют человека при выполнении рутинных, энергоемких, опасных операций. Роботы не устают, им не нужны паузы на отдых, вода и пища. Роботы не требуют повышения заработной платы и не являются членами профсоюзов.
Как правило, промышленные роботы не обладают искусственным интеллектом. Типичным является повторение одних и тех же перемещений манипулятора по жесткой программе.
Большие успехи достигнуты, например, в применении роботов на конвейерах автомобильных заводов. Уже существуют планы предприятий автомобильной промышленности, где все процессы сборки автомобилей и транспортировки полуфабрикатов будут осуществляться роботами, а люди будут только их контролировать[71]
В атомной и химической промышленности роботы широко используются при работах в радиоактивных и химически опасных для человека средах.
Создан робот для автоматизированной диагностики состояния ЛЭП, состоящий из беспилотного вертолета и устройства для посадки и движения по грозозащитному тросу[72].
В промышленности всех стран мира в 2016 году использовалось 1,8 млн штук роботов, прогнозируется, что к 2020 году их число превысит 3,5 млн штук.[73]
Прогнозируется, что объем продаж роботов в 2016—2019 гг. для применения в логистике, строительстве и сносе составит 177 тыс. единиц[69].
В сельском хозяйстве находят применение первые роботы, осуществляющие автоматизированный уход за сельскохозяйственными культурами[74]. Испытываются первые роботизированные парники по выращиванию овощей[75][76].
Прогнозируется, что объем продаж роботов в 2016—2019 гг. для применения в сельском хозяйстве составит 34 тыс. единиц[69].
В медицине робототехника находит применение в виде различных экзоскелетов, помогающих людям с нарушениями функции опорно-двигательного аппарата[77]. Разрабатываются миниатюрные роботы для вживления в организм человека в медицинских целях: кардиостимуляторы, датчики информации и т. д.[78]
В России разработан первый роботический хирургический комплекс для выполнения операций в урологии[79].
Прогнозируется, что объем продаж роботов в 2016—2019 гг. для применения в медицине составит 8 тыс. единиц[69].
Роботы-манипуляторы применяются в космических летательных аппаратах. Например, в космическом аппарате наблюдения Орлец, присутствовал так называемый капсульный автомат, загружающий малогабаритные спускаемые капсулы отснятой пленкой. Планетоходы, такие, как луноход и марсоход, могут рассматриваться как интереснейшие примеры мобильных роботов.
Первый чемпионат мира по футболу среди роботов прошел в Японии в 1996 году (см. RoboCup).
По прогнозам, выпуск полностью автоматизированных легковых автомобилей с автопилотом в 2025 году составит 600 тыс. шт.[80]
Уже разработаны первые полностью автономные роботы для военного применения. Начались международные переговоры о их запрещении[81][82].
Пожарные роботы (роботизированные установки) активно применяются в пожаротушении. Робот способен самостоятельно без помощи человека обнаружить очаг возгорания, рассчитать координаты, направить огнетушащее средство в центр возгорания. Как правило, данные роботы устанавливаются на взрывоопасных объектах
Начиная с 2016 года, были основаны несколько компаний, которые приступили к созданию роботов на основе искусственного интеллекта, предназначенных для продажи в области игрушек для взрослых. Таким образом, можно заявить о создании новой области применения роботов. В 2020 году спрос на такого рода продукцию имеет положительную динамику.
Отмечается, что часовая оплата ручного труда в развитых странах возрастает примерно на 10—15 % в год, а затраты на эксплуатацию робототехнических устройств увеличиваются на 2—3 %. При этом, уровень почасовой оплаты американского рабочего превысил стоимость часа работы робота примерно в середине 70-х годов XX века. Как следствие, замена человека на рабочем месте роботом начинает приносить чистую прибыль примерно через 2,5—3 года
Роботизация производства уменьшает конкурентное преимущество экономик с дешевой рабочей силой и вызывает перемещение квалифицированной рабочей силы из производства в сферу услуг. В перспективе массовые профессии (водители, продавцы) будут роботизированы . В России может быть заменено до половины рабочих мест
Увеличение числа используемых в промышленности США роботов на одну штуку в период с 1990 по 2007 год приводило к ликвидации шести рабочих мест у людей. Каждый новый робот на тысячу рабочих мест понижает среднюю зарплату по экономике США в среднем на половину процента[
В России роботы используются в основном в автомобильной промышленности и микроэлектронике.
Типы роботов:
Если я не полностью рассказал про роботы? Напиши в комментариях Надеюсь, что теперь ты понял что такое роботы, робототехника, робот и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника



Комментарии
Оставить комментарий
Робототехника
Термины: Робототехника