Лекция
Сразу хочу сказать, что здесь никакой воды про калибровка датчиков, и только нужная информация. Для того чтобы лучше понимать что такое калибровка датчиков, подсчет перекрестков, следование по инверсной линии, , настоятельно рекомендую прочитать все из категории Робототехника.
калибровка датчиков . подсчет перекрестков . следование по инверсной линии .
Для следования по линии может применяться множество разных подходов, но все они зависят от количества датчиков установленных на роботе, для наблюдения линии роботом. Давайте поговорим о том, как количество датчиков влияет на способность робота следовать по линии.
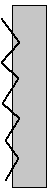
Для данного способа следования по линии необходим только один датчик. На самом деле робот следует не по самой линии, а по ее границе, постоянно переходя от темного к светлому. На роботе также устанавливается два привода, один двигатель включается, когда линия видна, но выключается, когда линия не видна, другой активируется, когда линия не видна, но выключается, когда линия видна. И таким образом робот, виляя из стороны в сторону, двигается вдоль границы черного и белого. Это отлично работает на более медленных скоростях, но становится непригодным для использования в скоростном боте. Если датчик пересекает линию, он может развернуться и поехать в обратном направлении, если робот теряет линию, он начинает постоянно вращаться. Из–за простоты, такой тип датчика редко используется в схемах ботов с микроконтроллерами. Датчик может быть в одном из двух возможных состояний 1 или 0 (см. рисунок)
Условия работы сенсора:
0 – линия не видна
1 – линия видна
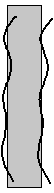
Принцип работы похож на первый датчик, но каждый датчик контролирует свой двигатель. Линия находится между датчиков, а они в свою очередь стараются избегать ее. На большой скорости эта схема работает лучше, чем предыдущая. Но если линия будет потеряна, то робот начнет блуждать. Это происходит потому, что бот не может отличить границы линии, и ее потерю. Этот недостаток можно устранить программно, если в качестве мозга робота используется микроконтроллер. Чем меньше зазор между линией и датчиком, тем аккуратнее робот будет следовать по линии.
Условия работы сенсора:
00 - граница линии потеряна
01- линия справа
10 - линия слева
11 - Не используется, если расстояние между датчиками больше чем ширина линии.
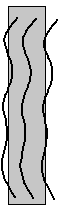
При добавлении третьего датчика к предыдущему дизайну, бот может, определять линии и ее края. Тем самым робот может замечать съезд с линии. Также данная схема, легче адаптируется к меняющимся условиям, можно увеличить скорость на прямой, или настроить управление более тонко.
Это одна из наиболее распространенных конструкций, мозгом робота с таким количеством сенсоров в основном является микроконтроллер.
Условия работы сенсора:
001 - линия слева
010 -линия по центру
011 - линия ушла немного влево
100 - линия справа
101 - не используется
110 - линия ушла немного вправо
111 - Не используется (но может использоваться для слежения линии в лабиринте или на сложных трассах с перекрестками)
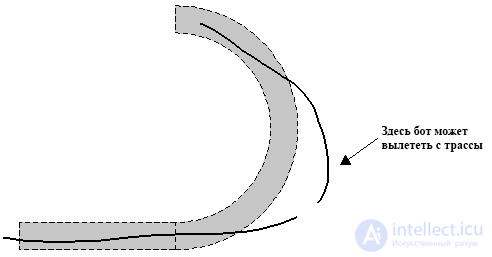
Трех датчиков, очевидно, достаточно, чтобы эффективно следовать линии, так почему же мы хотим добавить еще два? Ответ на этот вопрос сводится к главному качеству роботов для следования по линии - скорость. Добавление еще двух датчиков повышает чувствительность, и датчики могут с большим разрешением распознавать положение линии под бампером робота. Когда бот движется не слишком быстро, есть много времени для регулировки направления и скорости, чтобы удержаться на линии. Что же происходит, когда скорость значительно увеличивается? Вместо того чтобы изящно следовать линии, бот начинает избыточно поворачиваться и может вылететь с трассы.
С этим можно бороться двумя различными способами:
В какой-то момент из–за скорости, ваш робот будет преодолевать способность контролировать себя. Зная это, вы можете запрограммировать его, для коррекции выброса бота за линию, чтобы он был в состоянии найти линию еще раз.
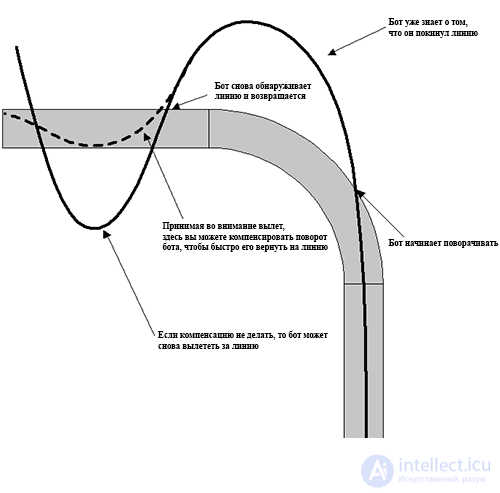
В примере на фото выше, робот потерял линию, когда вошел в поворот. Так как он начал поворачивать налево, когда линия из под него ушла, он знает, что нужно повернуть налево, пока не найдет полосу, крайним левым датчиком (на довольно остром углу) перед любым другим датчиком. В нормальных условиях только левый датчик, видя линию, будет поворачивать робота до упора влево. Но только для того чтобы привести его к линии не включаясь в нее. Это вернет бота обратно на трассу, и не даст ему перелететь через полосу. В отличие от предыдущей схемы здесь очень важно наличие еще двух дополнительных датчиков. Они служат для более точного управления и быстрого реагирования на выброс и избыточную поворачиваемость. Кликните здесь, чтобы посмотреть видео моего робота Arty.
Как и в других проектах, давайте посмотрим возможные условия работы с пятью датчиками (я перечислил только полезные):
00000 - Потеря линии от превышения скорости или разрыв в линии.
00001 – Робот почти потерял линию, необходимо полностью повернуть на право и снизить скорость.
00011 – линия с правого края, повернуть на право.
00010 – линия ушла вправо, держаться правого края.
00110 - чуть правее от центра линии, небольшая коррекция на право.
00100 - по центру линии, увеличить скорость для прямых участков.
01100 - Чуть левее от центра линии, небольшая коррекция влево.
01000 - Линия ушла влево, держаться левого края.
11000 - линия с левого края, повернуть налево.
10000 - Робот почти потерял линию, необходимо полностью повернуть налево и снизить скорость.
11111 - пересечение линии или круг в конце лабиринта.
Как вы можете видеть, если мы используем 5 датчиков, у нас получается гораздо более тонкий контроль движения бота,. Глядя на состояние датчиков в виде двоичных чисел, мы можем легко запрограммировать логику нашего робота.
Ниже приведен фрагмент кода от Arty, моего последнего робота для следования по линии. Это основной цикл логики, который управляет и рулевым управлением и скоростью и учитывает выброс за пределы линии, а также пытается компенсировать избыточную поворачиваемость. Об этом говорит сайт https://intellect.icu . Он написан на BASCOM для DevBoard-M8.
Lineflag это переменная, которая содержит двоичное представление состояния 5 датчиков.
Servo (1) ШИМ канал сервоприводов рулевого управления.
Servo (2) ШИМ канал приводных сервоприводов.
Overshoot флаг, указывающий на то что бот потерял линию в повороте.
Bascom Основной сегмент кода для Arty:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
|
Case &B00000 'No line 'If the bot loses the line, make steering changes Servo(2) = Slow - Progspeed If Lastlineflag < 4 Then Overshoot = 1 'Overshot a righthand corner Elseif Lastlineflag > 4 Then Overshoot = 1 'Overshot a left hand corner End IfCase &B00100 'Line under center sensor Overshoot = 0 Servo(1) = Center Servo(2) = Mediumfast - ProgspeedCase &B00110 Overshoot = 0 Servo(1) = Smallright Servo(2) = Mediumfast - ProgspeedCase &B00010 Overshoot = 0 'Line under midright sensor Servo(1) = Mediumright Servo(2) = Mediumfast - ProgspeedCase &B00011 'Line between midright and right sensor If Overshoot = 0 Then Servo(1) = Largeright Servo(2) = Medium - Progspeed Else Servo(1) = Mediumright Servo(2) = Medium - Progspeed End IfCase &B00001 'Line under right sensor If Overshoot = 0 Then Servo(1) = Hardright Servo(2) = Mediumslow - Progspeed Else Servo(1) = Largeright Servo(2) = Mediumslow - Progspeed End IfCase &B01100 'Line between center and midleft sensor Overshoot = 0 Servo(1) = Smallleft Servo(2) = Mediumfast - ProgspeedCase &B01000 'Line under midleft sensor Overshoot = 0 Servo(1) = Mediumleft Servo(2) = Mediumfast - ProgspeedCase &B11000 'Line between midleft and left sensor If Overshoot = 0 Then Servo(1) = Largeleft Servo(2) = Medium - Progspeed Else Servo(1) = Center Servo(2) = Medium - Progspeed End IfCase &B10000 'Line under left sensor If Overshoot = 0 Then Servo(1) = Hardleft Servo(2) = Mediumslow - Progspeed Else Servo(1) = Largeleft Servo(2) = Mediumslow - Progspeed End IfEnd Select |
Итак, мы видим, что 5 датчиков обеспечивает более тонкую степень контроля, которая позволяет увеличить скорость бота на прямых, чтобы компенсировать время, затраченное на прохождение поворотов.
Заключение
Какая из четырех представленных схем подходит для вашего робота? Это зависит от вас. Наиболее простой является схема с парой датчиков. Больше датчиков даст вам больше контроля, но скорее всего, придется использовать микроконтроллер для обработки данных со всех датчиков. Используйте метод, который соответствует вашим потребностям и уровню квалификации - каждая конструкция имеет свои преимущества.
Добавление
Ниже представлена полная программа, используемая Arty 1.0. Мой первый робот, следующий по линии, имеющий шарнирно- сочлененную раму. Он включает в себя код для автоматической калибровки датчиков линии.
Эта программа была написана для ATMega8 на Bascom-AVR. Серво команда используется для управления сервоприводом рулевого управления и контроля скорости.
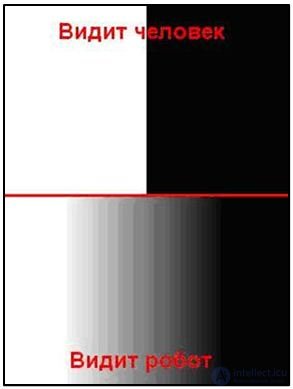
Поначалу это может показаться странным, но движение по границе черного и белого тоже можно построить на П-регуляторе. Хотя внешне задача представляется решаемой только с помощью релейного регулятора, поскольку в системе присутствует всего два видимых человеческому глазу состояния: черное и белое. Но робот все видит иначе, для него отсутствует резкая граница между этими цветами.
Можно сказать, он близорук и видит градиентный переход оттенков серого. Вот это нам и поможет построить П-регулятор.
Так же как и в релейном регуляторе, необходимо определить среднее значение между черным и белым, обозначим его grey. Это будет то состояние датчика освещенности s1, к которому должна стремиться система.
while(true)
{
up=k*(s1-grey);
motor[MotorB]=50+up;
motor[MotorC]=50-up;
wait1msec(1);
}
Коэффициент  может быть достаточно мал (от 1 до 3) для маневренного устройства.
может быть достаточно мал (от 1 до 3) для маневренного устройства.
Такой регулятор эффективно работает только для малых углов отклонения, поэтому устройство надо ставить в направлении движения так, чтобы датчик оказался по левую сторону от черной линии. Если датчик заедет на черную линию, регулятор станет отрицательным и левый мотор будет ехать медленнее правого, что выровняет робота. Нетрудно заметить, что движение по линии на П-регуляторе отличается плавностью и на некоторых участках робот движется практически прямолинейно, или точно повторяя изгибы линии.
А как ты думаешь, при улучшении калибровка датчиков, будет лучше нам? Надеюсь, что теперь ты понял что такое калибровка датчиков, подсчет перекрестков, следование по инверсной линии, и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Комментарии
Оставить комментарий
Робототехника
Термины: Робототехника