Лекция
Привет, Вы узнаете о том , что такое переходные процессы в электродвигателях, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое переходные процессы в электродвигателях, уравнения парка-горева , настоятельно рекомендую прочитать все из категории Теоретические основы электротехники.
Наиболее точное описание переходных процессов как в синхронных, так и в асинхронных двигателях дает система уравнений Парка-Горева. Однако при этом нужно учесть некоторые факторы, которые несущественны при переходных процессах в генераторах.
Режимы генераторов всегда ограничены малыми скольжениями, а скольжение синхронных (и асинхронных) двигателей может изменяться от нуля до единицы. При больших скольжениях значительно проявляется эффект вытеснения тока в демпферных контурах ротора. Этот эффект может быть учтен несколькими демпферными контурами по каждой оси, что приводит к увеличению числа уравнений Парка-Горева, а также числа слагаемых в уравнениях для потокосцеплений. Приближенно эффект вытеснения тока можно учесть, сохранив по одному демпферному контуру в каждой оси машины, если ввести зависимости  от скольжения. Эти зависимости аналогичны зависимостям
от скольжения. Эти зависимости аналогичны зависимостям  , характерным для асинхронных двигателей.
, характерным для асинхронных двигателей.
В систему уравнений (3.2) входят значения синхронных сопротивлений  , обмотки возбуждения
, обмотки возбуждения  и демпферных обмоток
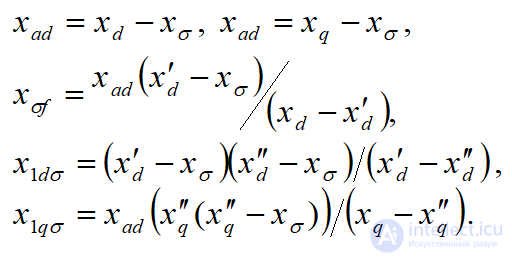
и демпферных обмоток  . Эти сопротивления состоят из сопротивлений взаимоиндукции по соответствующей оси
. Эти сопротивления состоят из сопротивлений взаимоиндукции по соответствующей оси  и сопротивления рассеяния
и сопротивления рассеяния :
:

Синхронные  , переходные
, переходные  и сверхпереходные
и сверхпереходные  сопротивления указываются в паспорте двигателей. Сопротивления рассеяния статора явнополюсных двигателей
сопротивления указываются в паспорте двигателей. Сопротивления рассеяния статора явнополюсных двигателей 
В систему уравнений Парка-Горева для синхронных двигателей входят следующие величины:
Активное сопротивление статора определяется выражением
где Ta – постоянная времени затухания апериодических токов статора.
Активное сопротивление любого роторного контура при разомкнутых остальных контурах определяется через соответствующую постоянную времени, связанную с ними соотношениями
Переходный процесс в синхронных двигателях протекает так же, как и в синхронных генераторах. Однако в начальный момент переходного процесса двигатели имеют другие значения сверхпереходных ЭДС. У перевозбужденного синхронного двигателя сверхпереходная ЭДС выше подведенного напряжения. При этом резкое снижение напряжения приводит к увеличению реактивного тока, генерируемого двигателем. В случае недовозбуждения синхронного двигателя, его ЭДС ниже подведенного напряжения и реактивный ток потребляется из сети, при равенстве ЭДС и напряжения реактивный ток в начале переходного процесса отсутствует.
Асинхронные двигатели в начальный момент переходного процесса можно рассматривать как перевозбужденные синхронные двигатели, поскольку в нормальном режиме они работают как с малым скольжением (2...5 %). Для асинхронных двигателей систему уравнений Парка-Горева используют в тех случаях, когда необходимо учесть электромагнитные переходные процессы.
Полная симметрия асинхронной машины и отсутствие возбуждения позволяют упростить уравнения и представить их в более удобной системе координат. При этом 
+Однако существенная зависимость параметров ротора от частоты токов в двигателе, модель которого содержит по одному контуру ротора в каждой оси с постоянными параметрами  , приводит к значительным погрешностям расчета переходных процессов при больших изменениях скольжения.
, приводит к значительным погрешностям расчета переходных процессов при больших изменениях скольжения.
Для более точного описания электромагнитных переходных процессов в асинхронных машинах необходимо представить ротор несколькими контурами в каждой оси.
расчетную схему механической части привода можно свести к одному обобщенному жесткому механическому звену, имеющему эквивалентную массу с моментом инерции у, на которую воздействует вращающий момент двигателя М и суммарный, приведенный к валу двигателя, момент сопротивления (статический момент) Мс, включающие все механические потери в системе, в том числе механические потери в двигателе (рис. 7.1). Тогда уравнение движения электропривода примет вид
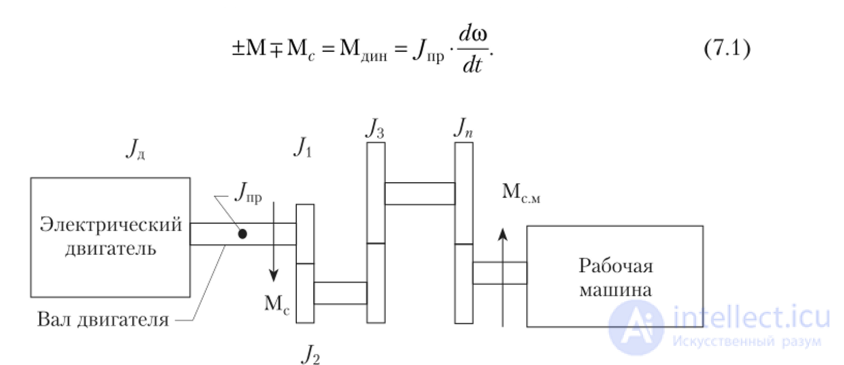
Рис. 7.1. Кинематическая схема электропривода
Момент инерции может быть выражен как

где г и D — радиус и диаметр ротора, м; G — сила тяжести, н; g — ускорение свободного падения, 9,81 м/с2.
Входящая в уравнение (7.2) величина

получила название махового момента. Для электродвигателей значения махового момента в числовом выражении приводятся в каталогах по электрооборудованию.
Из уравнения (7.1) видно, что при:
При определении приведенного момента инерции/пр (рис. Об этом говорит сайт https://intellect.icu . 7.2) необходимо исходить из закона сохранения энергии, т.е. запас кинетической энергии должен оставаться постоянным.

гдеJl4VJM2 — моменты инерции отдельных узлов привода; т — масса элементов, движущихся поступательно со скоростью v.
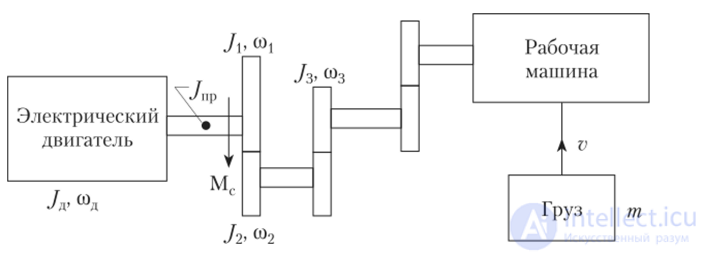
Рис. 7.2. Схема для определения приведенного момента инерции
Решив уравнение (7.4) относительно/,,^ получим
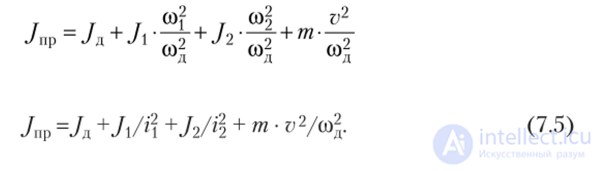
или
Исходя из этого уравнения, можно определить:
Расчет продолжительности переходных процессов электропривода.
Исходя из основного уравнения движения электропривода с постоянным моментом инерции можно записать
Для определения продолжительности механического переходного процесса достаточно проинтегрировать это выражение.
Из-за сложности представления аналитической зависимости избыточного момента от скорости вращения
и последующего его интегрирования прибегают к приближенному решению уравнению методом конечных приращений.
Суть метода конечных приращений сводится к замене дифференциалов переменных величин dt и dω их конечными малыми приращениями Δt и Δω на каждом i-м участке разгона или торможения электропривода.
При определенном малом приращении Δωi на i–м участке избыточный момент этого участка можно считать постоянным и равным среднему значению.
Таким образом, полная продолжительность переходного процесса электропривода будет равна
где n – число участков , на которые разбивают скоростной интервал.
С учетом предыдущего выражения это соотношение может быть представлено в виде
Общие потери мощности в электродвигателе ΔР содержат постоянную К и переменную V составляющие. Под постоянными потерями подразумеваются потери мощности, не зависящие от нагрузки электродвигателя. К ним относятся потери в стали магнитопровода, механические потери от трения в подшипниках и вентиляционные потери. Постоянные потери мощности равны
Под переменными потерями подразумеваются потери, выделяемые в обмотках электродвигателей при протекании по ним токов, определяемых механической нагрузкой электропривода. Переменные потери мощности в электродвигателях постоянного тока:
В трехфазных асинхронных электродвигателях

где V1 и V2 – соответственно потери мощности в цепях обмоток статора и ротора.
При использовании Г-образной схемы замещения электродвигателя

Переменные потери мощности, выделяющиеся в роторе асинхронного электродвигателя, могут быть определены через механические переменные и параметры
Тогда полные переменные потери будут равны
Большое значение определение потерь электроэнергии в переходных процессах имеет для электродвигателей, у которых динамический режим является основным. К ним относятся электроприводы прокатных станов, подъемных кранов, строгальных станков, лифтов и т.д.
Потери энергии при пуске АД практически полностью определяются электрическими потерями энергии в обмотках, которые прямо пропорциональны квадрату силы тока
где ΔРн- номинальные электрические потери мощности, электродвигателя, Вт; i – кратность тока электродвигателя по отношению к номинальному.
Для АД с короткозамкнутым ротором эквивалентное значение тока за период пуска составляет примерно 0,9 его пускового значения при ω=0
С учетом этого
Номинальные электрические потери мощности электродвигателя равны
где α – коэффициент равный отношению постоянных потерь мощности к номинальным переменным,
α=0,5…0,7 для АД общего назначения;
α=0,4…1 для крановых АД.
С учетом предыдущего соотношения расчетная формула для определения потерь энергии при пуске имеет вид

Через механические переменные и параметры потери мощности при пуске электродвигателя без нагрузки (Мс=0) определяют по формуле

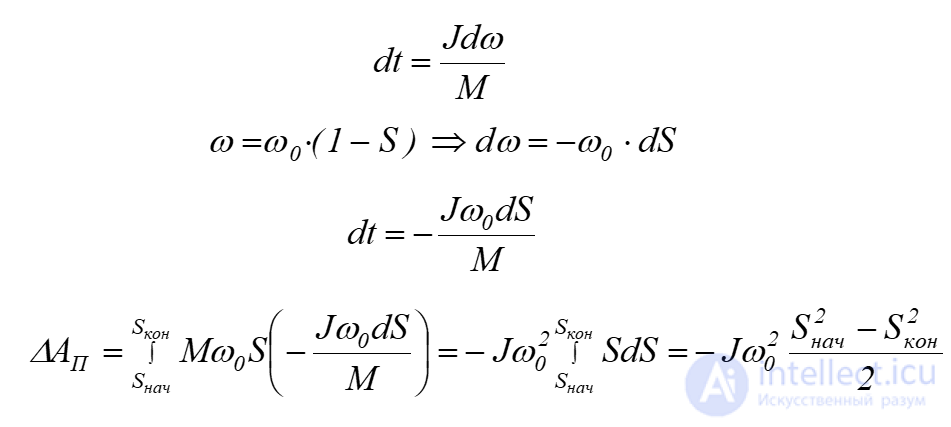
При пуске электродвигателя и динамическом торможении Sнач=1, Sкон=0, тогда
При торможении противовключением Sнач=2, Sкон=1, а потери энергии
При реверсе Sнач=2, Sкон=0 и потери энергии
Потери энергии, а соответственно и нагрев электродвигателей в переходных режимах можно уменьшить следующими путями:
При рассмотрении динамики различных электроприводов возникает задача оценки их устойчивой работы при возникновении внешних механических воздействий, приводящих к возникновению в системе электропривода избыточного момента (это может произойти, например. при изменении нагрузки или условий питания).
Статическую устойчивость ЭП рассматривают в том случае, если длительность избыточного момента нагрузки превышает длительность возникшего переходного процесса. Динамическую устойчивость рассматривают при кратковременном возникновении избыточного момента. При возникновении в системе электропривода внешнего воздействия уравнение движения можно записать в виде
С учетом
Получим
где β, βс – жесткости механических характеристик электродвигателя и рабочей машины.
Разделяя переменные, запишем дифференциальное уравнение
решая которое будем иметь
где с – постоянная интегрирования.
Из начальных условий при t=0 Δω=Δωнач. Тогда на основании последнего соотношения с= Δωнач.
Следовательно
Окончательно

Из предыдущего уравнения следует, что для обеспечения статической устойчивости необходимо, чтобы при t→∞ Δω→0, а это возможно при условии

Это соотношение служит критерием устойчивости электропривода, согласно которому работа ЭП устойчива, если жесткость механической характеристики статической нагрузки больше жесткости механической характеристики электродвигателя в точке их пресечения.
При работе ЭП момент статического сопротивления перегрузки Мсп, действующий со стороны нагрузки, может превышать максимально допустимый момент электродвигателя М1 в течение небольшого интервала времени, общая длительность которого меньше длительности возникшего электромеханического переходного процесса.
При динамической устойчивости работоспособность ЭП сохраняется за счет дополнительного действия кинетической энергии движущихся масс электропривода при формально статической неустойчивости
Рабочий участок механической характеристики аппроксимируется прямой. В этом случае при ударной нагрузке увеличение момента электродвигателя происходит по экспоненциальному закону

где М0 – момент электродвигателя при работе до перегрузки, Н·м;
Тм - электромеханическая постоянная времени электропривода, с.
Для электропривода с асинхронным электродвигателем

где Sн - скольжение АД при номинальном моменте нагрузки.
Момент электродвигателя достигает максимального значения по истечении некоторого допустимого времени перегрузки.
Если фактическая продолжительность приложения ударной нагрузки
 то работа электропривода динамически устойчива.
то работа электропривода динамически устойчива.
Если же
 то работоспособность ЭП нарушается.
то работоспособность ЭП нарушается.
Исследование, описанное в статье про переходные процессы в электродвигателях, подчеркивает ее значимость в современном мире. Надеюсь, что теперь ты понял что такое переходные процессы в электродвигателях, уравнения парка-горева и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Теоретические основы электротехники

Комментарии