Лекция
Это продолжение увлекательной статьи про проблемы распознавания.
...
мозга, несмотря на то, что количество элементов в современных компьютерах (во всяком случае, в многопроцессорных системах) уже вплотную приближается к числу нейронов в мозгу у человека.
Специалисты в области нейрофизиологии экспериментально показали, что у человека и животных процесс обработки информации носит многоуровневый и многоэтапный характер . При этом даже на предварительной стадии выделения информации, когда речь о распознавании еще не идет, выделяются 3 – 4 самостоятельных уровня. В общем же количество уровней в зависимости от типа обрабатываемой информации вполне может составлять 6 – 10. Причем каждый из уровней имеет свою «аппаратную» часть (разделы мозга), свой способ представления информации и свой язык. Экспериментально также показано , что, во всяком случае, на начальной стадии обработка информации на каждом уровне осуществляется простыми и понятными для нас способами, которые можно достаточно просто реализовать на аппаратном уровне, либо программно. В то же время искусственные системы распознавания, как правило, имеют лишь три уровня (исходная информация – признаки – образ) или, в лучшем случае, четыре (исходная информация – непроизводные элементы – признаки – образ). Учитывая превосходство живых существ в распознавании образов над искусственными системами, можно сделать вывод о большей эффективности многоуровневого представления информации.
Несмотря на перечисление ограничений классического подхода, автор вовсе не считает, что в распознавании образов нет достижений. Напротив, за последние десятилетия был развит ряд мощных междисциплинарных направлений, требующих значительных интеллектуальных и практических усилий в нейрофизиологии, теоретической и прикладной математике, физике, искусственных нейросетях и т.д. К числу этих направлений можно отнести статистическую теорию распознавания образов, создание ряда мощных вычислительных методов, обнаружение на основании экспериментальных данных ряда важных принципов обработки информации у человека, развитие идеологии семантических сетей, теория и практика нейросетей… Список можно продолжить. Возникает замечание: что-то из этого списка оказалось не совсем адекватным, но давайте, определим самый подходящий метод или идеологию и, в конце концов, решим проблему распознавания. Представляется, что это неверный подход.
Как уже указывалось в предисловии, есть веские основания считать, что ключевые образов, кибернетики и искусственного интеллекта имеют одно и то же происхождение: мы пытаемся описать слишком сложный предмет с помощью слишком простого понятийного аппарата. В частности, к предмету, работу которого нужно объяснить, относится и сам субъект познания – человеческий мозг. Задача эта сложная, значительно сложнее квантовой механики и, возможно, самая сложная из тех, с какими до этих пор сталкивалось человечество. Сложность ее состоит, прежде всего, в необходимости коренного, и, что не менее важно, взаимосогласованного преобразования целого ряда научных дисциплин. Теория информации должна описывать прео бразование информации на всех уровнях и этапах ее переработки – зрительной, лингвистической и т.д., должны быть установленызаконы обобщения, принципы оптимального представления информации и т.д. В математике должна быть создана в полном объеме теория преобразования сложных многомерных данных, представленных в неполной и неточной форме, а также любыми видами описания – формальными, на естественных языках и т.д. Нейросети должны дойти до уровня, моделирующего наиболее важные принципы работы человеческого мозга и квантовых компьютеров.
Данное свойство можно назвать вложенностью. А что если какой-то предмет попросту не имеет названия, соответственно его нет в базе исходных образцов, по которым обучается алгоритм – что в таком случае должен распознавать робот?
Облако, которое я в данный момент наблюдаю в окне, не имеет именованных частей, хотя очевидным образом состоит из краев и середины. Однако специальных терминов для краев и середины облака не существует, не придуманы. Для указания на неименованный объект я употребил вербальную формулировку («облако» – тип объекта, «край облака» – вербальная формулировка), что в возможности алгоритма распознавания изображений не входит.
Получается, что алгоритм без логического блока мало на что пригоден. Если алгоритм обнаружит часть целого объекта, то не всегда сможет сообразить – соответственно, робот не сможет сообщить, – что это такое.





Человек обладает способностью конструировать объекты реальности, присваивая имена новым обнаруженным объектам, к примеру видам фауны. Коня с человеческими головой и торсом он назовет кентавром, но для этого предварительно сообразит, что у данного существа человеческие голова и торс, а все остальное – лошадиное, тем самым признает увиденный объект за новый. Так поступает человеческий мозг. А алгоритм при отсутствии вводных данных определит такое существо либо как человека, либо как лошадь: не оперируя характеристиками типов, не сумеет установить их комбинацию.
Чтобы робот уподобился человеку, он обязан уметь определять новые для него типы объектов и присваивать данным типам имена. В описаниях нового типа должны фигурировать характеристики известных типов. А если робот этого не умеет, на кой ляд он нам нужен, такой красивый?
Допустим, мы отправляем робота-разведчика на Марс. Робот видит нечто необычное, но способен идентифицировать объект исключительно в известных ему земных понятиях. Что это даст людям, выслушивающим поступающие от робота вербальные сообщения? Иногда – что-то даст, конечно (если на Марсе обнаружатся земные предметы), а в иных случаях – ничего (если марсианские предметы окажутся не похожи на земные).
Изображение – другое дело: человек сам сможет все увидеть, правильно оценить и поименовать. Только посредством не заранее обученного алгоритма распознавания изображений, а своего более хитро устроенного человеческого мозга.


Окружающий мир состоит из конкретных предметов. Собственно, видеть можно только конкретные предметы. Но в некоторых случаях их требуется вербально индивидуализировать, для чего используются либо личные имена («Вася Петров»), либо простое указание на конкретный объект, произносимое или подразумеваемое («этот стол»). То, что я называю типами объектов («люди», «столы») – всего лишь собирательные наименования предметов, обладающих определенными общими характеристиками.
Алгоритмы распознавания изображений, если обучить их на исходных образцах, будут способны распознавать как индивидуализированные, так и неиндивидуализированные объекты – это хорошо. Распознавание лиц в местах массового скопления людей и все такое. Плохо то, что такие алгоритмы не поймут, какие предметы следует распознавать в качестве обладающих индивидуальностью, а какие категорически не стоит.
Робот, как обладатель ИИ, должен бы время от времени разражаться сообщениями типа:
– Ой, а эту старушку я уже видел неделю назад!
А вот по поводу травинок злоупотреблять подобными репликами не стоит, тем более что имеются обоснованные опасения по поводу достаточности вычислительных мощностей для выполнения подобной задачи.
Мне непонятно, где проходит тонкая грань между индивидуализированной старушкой и бесчисленными полевыми травинками, которые сами по себе индивидуализированы не менее старушки, но при этом для человека никакого интереса с точки зрения индивидуализации не представляют. Что в этом смысле распознанное изображение? Почти ничего – начало сложного до мучительности восприятия окружающей действительности.
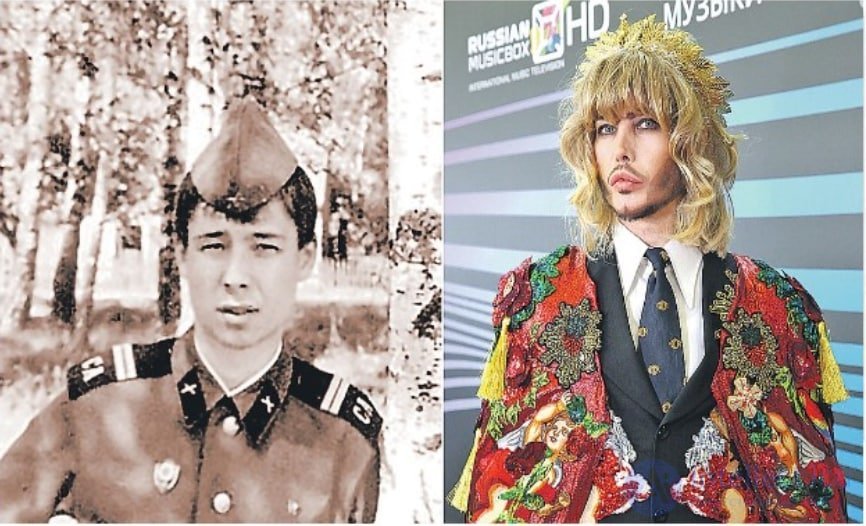
Рис . Это один и тот же человек. Сергей Зверев
Я сижу перед камином в глубоком кресле и теперь пытаюсь подняться.
– Что ты видишь, робот?
С нашей обыденной точки зрения робот видит, как я поднимаюсь с кресла. Что он должен ответить? Наверное, релевантным ответом будет:
– Я вижу, как ты поднимаешься с кресла.
Для этого робот должен знать, кто такой я, что такое кресло и что значит подниматься…

Алгоритм распознавания изображений после соответствующей настройки сумеет распознать меня и кресло, далее посредством сравнения кадров мы сможем определить факт взаимного удаления меня от кресла, но что значит «подниматься»? Как вообще происходит «поднимание» в физической реальности?
Если я уже поднялся и отошел, все достаточно просто. После того, как я отдалился от кресла, все предметы в кабинете не изменили пространственного положения относительно друг друга, за исключением меня, который первоначально находился в кресле, а через какое-то время оказался в отдалении от кресла. Допустимо сделать вывод, что я покинул кресло.
Если я еще пребываю в процессе вставания с кресла, все несколько сложней. Я по-прежнему нахожусь рядом с креслом, однако взаимное пространственное положение частей моего тела изменилось:
Наблюдай за моим поведением человек, он мгновенно сделает вывод, что я поднимаюсь с кресла. Для человека это будет не столько логический вывод, сколько зрительное восприятие: он буквальным образом увидит, что я поднимаюсь с кресла, хотя на самом деле увидит изменение взаимного положения частей моего тела. Однако, на самом деле это будет логический вывод, который кто-то должен объяснить роботу, либо данный логический вывод робот должен выработать самостоятельно.
И то, и другое равным образом затруднительно:
И при чем здесь алгоритмы распознавания изображений? Они никогда не смогут определить, что я поднимаюсь с кресла.
"Вставание " из предыдущего примера– абстрактное понятие, определяется изменением характеристик материальных объектов, в данном случае изменением их взаимного пространственного положения. В общем случае это справедливо для любых абстрактных понятий, ведь сами по себе абстрактные понятия в материальном мире не существуют, а полностью зависят от материальных объектов. Хотя зачастую мы воспринимаем их как наблюдаемые воочию.
Сдвинуть челюсть вправо или влево, не открывая рот – как данное действие называется? А никак. Несомненно, по той причине, что такое движение для человека в общем-то нехарактерно. Увидеть-то робот с помощью обсуждаемых алгоритмов увидит, а что толку? В базе исходных образцов нужное наименование будет отсутствовать, и назвать зафиксированное действие робот затрудниться. А давать развернутые вербальные формулировки неименованным действиям, равно как и другим абстрактным понятиям, алгоритмы распознавания изображений не обучены.
По сути, имеем дубликат первого пункта, только в отношении не предметов, но абстрактных понятий. Впрочем, остальные пункты, предыдущие и последующие, также могут быть увязаны с абстрактными понятиями – просто обращаю внимание на повышение уровня сложности при работе с абстракциями.
Представьте, что вы наблюдаете, как пикап вылетает с дороги и сносит ограду. Причина того, что ограда снесена – движение пикапа, и в свою очередь движение пикапа имеет следствием снос ограды.
– Я видел это собственными глазами!
Это ответ на вопрос, видели вы случившееся или додумались до него. А что вы видели на самом деле?
Несколько предметов, в такой динамике:
Основываясь на визуальном восприятии, робот должен сообразить, что в обычном случае ограды не меняют форму и местоположение: здесь это произошло в результате контакта с пикапом. Предмет-причина и предмет-следствие должны контактировать друг с другом, иначе причинность в их отношениях отсутствует.
Хотя здесь мы попадаем в логическую ловушку, ведь контактировать с предметом-следствием могут и другие предметы, не только предмет-причина.
Допустим, в момент удара пикапа на ограду села галка. Пикап и галка контактировали с оградой одновременно: как определить, в результате какого контакта ограда оказалась снесена?
Наверное, с помощью повторяемости:

Таким образом, вывод о том, что ограда снесена пикапом, – не совсем наблюдение, а результат анализа на основе наблюдения контактирующих между собой предметов.
С другой стороны, воздействие может осуществляться на расстоянии, например воздействие магнита на железный предмет. Как робот догадается, что приближение магнита к гвоздю заставляет гвоздь устремляться к магниту? Визуальная картинка не такая:
Как видите, отслеживать причинно-следственные связи очень непросто, даже в тех случаях, когда свидетель заявляет с железной убежденностью, что видел это собственными глазами. Алгоритмы распознавания изображений здесь бессильны.
Окружающая визуальная картинка может состоять из сотен и тысяч вложенных друг в друга объектов, многие из которых постоянно изменяют свое пространственное положение и другие характеристики. Очевидно, что роботу нет нужды воспринимать каждую травинку в поле, впрочем, как и каждое лицо на городской улице: воспринимать нужно только важное, зависящее от выполняемых задач.
Очевидно, что настроить алгоритм распознавания изображений на восприятие одних объектов и игнорирование других не получится, так как может быть заранее не известно, на что следует обращать внимание, а что игнорировать, тем более что текущие цели могут меняться по ходу дела. Может сложиться такая ситуация, когда сначала потребуется воспринять многие тысячи вложенных друг в друга объектов – буквально каждый из них, – проанализировать и лишь затем выдать вердикт, какие объекты существенны для решения текущей задачи, а какие не представляют интереса. Именно так воспринимает окружающий мир человек: он видит лишь важное, не обращая внимание на малоинтересные фоновые события. Каким образом ему это удается, составляет тайну.
А робот, даже оснащенный самыми современными и хитроумными алгоритмами распознавания изображений?.. Если во время нападения марсианских инопланетян он начнет доклад со сводки погоды и продолжит описанием расстилающегося перед ним нового ландшафта, то может и не успеть сообщить о самом нападении.

не все образы могутнаходиться целиком в поле зрения, это пораждает проблемы его распознавания и идентификации
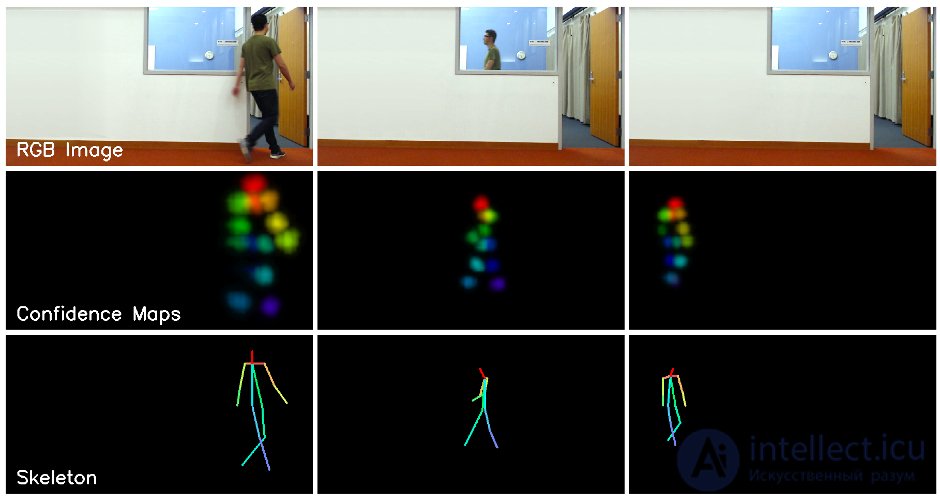
на фото использование радиоволн в проекте “RF-Pose”. для решения подобной задачи, однако попробуйте сделать это с не предсказуемым объектом и без радиоволн

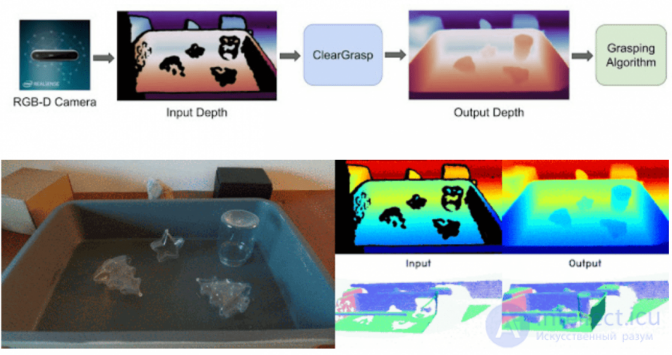
Объекты, состоящие из прозрачного материала или с зеркальным покрытием представляют сложность в рапознавании и идетификации. Это представляет большую проблему для алгоритмов распознавания, потому что, как правило, они определяли форму и границу объекта, сравнивая его вид с разных ракурсов, а если предмет выполнен из стекла или дает очень яркие отражения, алгоритмы не могут рассчитать по снимкам адекватную 3D-модель .

Представи ситуацию, когда мы рассматриваем зеркальный объект, т.е. отполированный до такой степени, что шероховатости на его поверхности не воспринимаются глазом. Например, идеально отполированную сферу (простейший пример — елочная игрушка в виде зеркального шара). Если вблизи такой сферы нет никаких предметов и мы подсветили ее каким-либо источником света в темноте, то ее очертания будут довольно неопределенными.
Надо отметить, что художников часто интересовала проблема визуализации зеркальных объектов. Так, изображения такого рода объектов есть на ряде полотен
известного русского художника К.С. Петрова-Водкина, как, например, на картине "За самоваром", репродукция которой приведена здесь.
почему мы видим сферу, а не светящуюся Точку в ее центре? Поместив идеально отполированную сферу (разумеется, в масштабах, превышающих разрешающую способность глаза) в поле плоской волны (например, облучив лучом лазера) в комнату с поглощающими стенами, мы и в самом деле ничего, кроме светящейся точки в центре сферы, ее увидим. Яркость этой точки будет определяться свойствами поверхности сферы, т... например. идеально отполированная сфера из поглощающего материала будет в описанной ситуации восприниматься как тусклая точка. В обычной обстановке мы видим, например, ту же сферу в окружении множества других предметов.
Изображающихся в ней и формирующих совокупностью этих изображений зрительный образ, воспринимаемый нами как сфера. Бели поверхность сферы шероховатая, то это по существу означает, что мы имеем дело с объектом, имеющим форму, близкую к сферической, со множеством особых точек па поверхности, являющихся источниками рассеянного поля.

Обобщение приведенного выше рассуждения для не сферических объектов позволяет в общих чертах понять, почему мы видим то, что мы видим. В самом деле, у объекта с зеркальной поверхностью источники рассеянного им поля находятся внутри него. Поэтому такой объект распознается тем лучше, чем больше посторонних предметов находится вблизи него и отображается в нем. И наоборот, если объект имеет шероховатую поверхность, то источники рассеянного поля лежат непосредственно на этой поверхности, что делает задачу распознавания формы объекта совсем простой.
Таким образом, мы приходим к выводу: для того чтобы расесиватель обладал свойствами "невидимки" т.е. был плохо распознаваемым, его форма должна быть как можно более близкой к идеальной аналитической поверхности, не иметь углов, выступов и иных иррегуляриостей, а поверхность должна обладать поглощающими
свойствами.
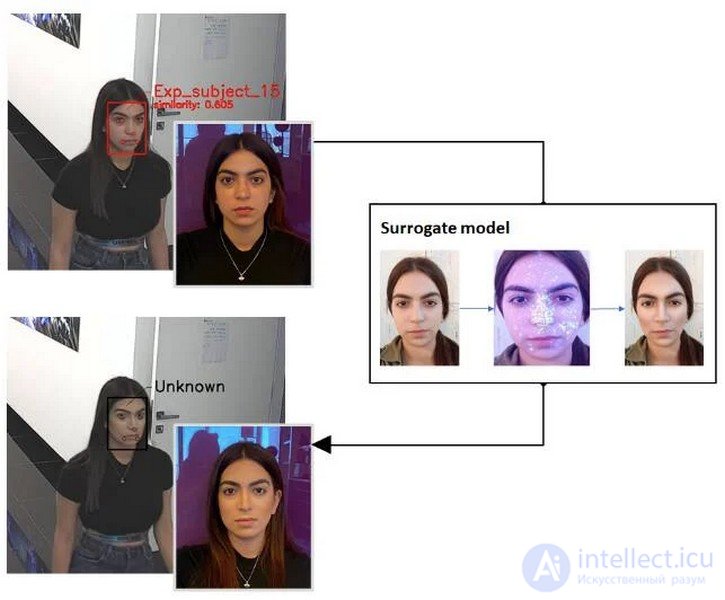
Сотрудники Университета имени Бен-Гуриона в Израиле и японского IT-гиганта NEC выяснили, что тщательно нанесенный макияж на лоб, щеки и нос может помочь обмануть системы распознавания лиц.
15.2 Изображение лица одного человека в условиях различной освещенности

Ральф Гросс, исследователь Института робототехники Карнеги-Меллона в 2008 году, описывает одно препятствие, связанную с углом обзора лицо: « Распознавание лица становится достаточно хорошо на полных фронтальных лицах и 20 градусов, но как только вы идете профиль, там были проблемы [ 8] ». Кроме вариаций позе, изображение с низким разрешением также очень трудно распознать. Это одно из главных препятствий распознавания лиц в системах наблюдения .
Распознавание лица менее эффективно, если мимика. Большая улыбка может сделать систему менее эффективной. Например: Канада, в 2009 году, допускала лишь нейтральные выражения лица в паспортных фотографиях .
Существует также непостоянство наборов данных, используемых исследователями. Исследователи могут использовать где из нескольких предметов на десятки предметов и несколько сотен изображений на тысячи изображений. Для исследователей важно сделать доступными наборы данных, которые они использовали друг другу, или иметь по крайней мере стандартный набор данных .
Конфиденциальность данных является главной проблемой, когда речь идет о хранении биометрических данных в компаниях. Доступ к хранилищам данных о лице или биометрические данные могут получить третья сторона, если она не сохранена должным образом или сломана. В Techworld, Parris добавляет (2017), " Хакеры уже будут искать, чтобы воспроизвести лица людей, чтобы обмануть системы распознавания лица, но эта технология оказалась сложнее сломать, чем отпечатки пальцев или технологии распознавания голоса в прошлом ».
Критики технологии жалуются на то, что схема Лондонского района Ньюхэм , начиная с 2004 года, никогда не признавала ни преступника, несмотря на то, что несколько преступников в базе данных системы, проживающих в районе, и система работает уже несколько лет. «Не раз, насколько полицейские знают, автоматическая система распознавания лица Ньюхэма не заметила живую цель» . Эта информация, кажется, конфликтует с утверждениями, что система была зачислена на 34% снижение преступности (так, почему она также была выпущена в Бирмингем) . Однако это можно объяснить понятием, когда общественности регулярно сообщают о том, что они находятся под постоянным видеонаблюдением с усовершенствованной технологией распознавания лиц, только этот страх может уменьшить уровень преступности, независимо от того, является система распознавания лиц технически или нет. Это стало основой для нескольких других систем безопасности на основе распознавания лиц, где сама технология не работает особенно хорошо, но восприятие пользователем технологии делает.
Эксперимент, проведенный в 2002 году местным отделом полиции в Тампе , штат Флорида , был аналогичные результаты .
Система в аэропорту Логан в Бостоне была закрыта в 2003 году после того, как не удалось выполнить никаких матчей в течение двухлетнего периода испытаний .
В 2014 году Facebook заявил, что в стандартизированном двумерном тесте распознавания лиц, его онлайн система набрала 97,25% точности по сравнению с человеческим показателем 97,5% .
В 2018 году в докладе общественных организаций, занимающихся агитацией по правам человека, Big Brother Watch было обнаружено, что две полицейские силы Великобритании , полиция Южного Уэльса и милиция , использовали распознавания лиц на общественных мероприятиях и в общественных местах, но точностью, низкий - 2% . Их доклад также предупреждает о значительных потенциальных права человека нарушений . Он получил широкое освещение в прессе в Великобритании .
Системы часто рекламируются как должны точность около 100% это вводит в заблуждение, поскольку исследования часто используют гораздо меньшие размеры выборки, чем это было бы необходимо для крупномасштабных приложений. Поскольку распознавания лица не является полностью точным, оно создает список потенциальных совпадений. После этого человек-оператор обязан просматривать эти потенциальные матче, а исследования показывают, что операторы выбирают правильный матч из списка только два раза. Это вызывает проблему нацеливания на неправильного подозреваемого .

Простое распознавание визуальных образов не заменит человеческих глаз.
Алгоритмы распознавания изображений – вспомогательный инструмент с весьма узкой сферой применения.
Чтобы робот начал не то что мыслить, а хотя бы видеть по-человечески, требуются алгоритмы не только распознавания образов, но и все того же полноценного и пока недостижимого человеческого мышления.
С общих – методологических, философских и познавательных – позиций проанализированы проблемы и ограничения распознавания образов. Отмечено, что большинство этих проблем имеет общее происхождение с проблемами кибернетики и искусственного интеллекта. Первопричинами застоя указанных научных направлений является, с одной стороны, попытка объяснить работу интеллекта в рамках автоматного, алгоритмического подхода, а с другой – необычайная сложность объекта исследования. Основные ограничения классической схемы распознавания образов можно свести к следующим положениям:
Распознавание образов не является самостоятельной процедурой, а включено в схему мышления. Не учитывая мышления и связанной с ним индивидуальной компоненты, мы в принципе не можем ни понять процесс распознавания, ни использовать его для построения искусственного интеллекта (а также для объяснения работы естественного).
Классическая схема распознавания не является ни бесспорной, ни единственной. Понятие «признак» является внутренне противоречивым и недостаточно обоснованным.
Существующего понятия информации недостаточно для адекватного описания преобразования информации в процессе распознавания.
Не существует последовательной теории учета априорной информации. Особенно плохо обстоит дело с учетом отрывочной, неполной и неточной информации.
Существующие математические методы и основанная на них обработка информации не позволяют провести вычисления для большей части практически интересных случаев. Решение этой проблемы может быть получено тремя взаимодополняющими способами: в рамках классической математики на основе теоремы Колмогорова о возможности представления сложной функции более простыми; с помощью нейросетей, использующих наиболее важные принципы работы мозга; с помощью квантовых компьютеров и аналогичных им устройств, осуществляющих нелокальную обработку информации.
Оптимальная реализация процесса распознавания должна содержать значительно больше уровней, чем существующая классическая схема, а само строение уровней и процедуры преобразования информации между ними должны быть гораздо более простыми и понятными.
Распознавание образов тесно связано с целым комплексом дисциплин: нейрофизиологией, теорией информации, математикой, нейросетями, искусственным и естественным интеллектом и рядом других научных дисциплин и направлений. В связи с этим крупные прорывы в распознавании образов следует ожидать только на пути комплексного и взаимо- согласованного развития этих дисциплин.
Человеческий мозг подсознательно разбивает объекты окружающего мира на классы, но механизм этого процесса неизвестен.
Процессу распознавания(классификации) предшествует процесс обучения, кроме случаев распознавания без учителя.
Благодаря априорному свойству схожести объектов внутри образа необязательно изучать все объекты образа, достаточно сделать представительную выборку.
Из-за расплывчатости образов, различных погрешностей (выборки, измерения и выбора свойств) невозможно гарантировать безошибочное распознавание.
продолжение следует...
Часть 1 Проблема и ошибки распознавания вложенных, прозрачных, зеркальных и других объектов
Часть 2 6. Недостаточный учет многоуровневости процесса обработки информации - Проблема и
Часть 3 - Проблема и ошибки распознавания вложенных, прозрачных, зеркальных и других
Данная статья про проблемы распознавания подтверждают значимость применения современных методик для изучения данных проблем. Надеюсь, что теперь ты понял что такое проблемы распознавания, проблемы распознавания образов, ошибки распознавания и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Распознавание образов
Комментарии
Оставить комментарий
Распознавание образов
Термины: Распознавание образов