Лекция
Привет, Вы узнаете о том , что такое rtk , Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое rtk , настоятельно рекомендую прочитать все из категории Устройства приема и обработки радиосигналов, Передача, прием и обработка сигналов.
Кинематическое позиционирование в реальном времени ( RTK ) — это применение геодезических исследований для исправления распространенных ошибок в современных системах спутниковой навигации (GNSS) . Он использует измерения фазы несущей волны сигнала в дополнение к информационному содержанию сигнала и полагается на одну опорную станцию или интерполированную виртуальную станцию для обеспечения поправок в реальном времени, обеспечивая точность до сантиметрового уровня (см. DGPS ). В отношении GPS, в частности, систему обычно называют улучшением фазы несущей или CPGPS . Он находит применение в топографической съемке , гидрографической съемке и навигации беспилотных летательных аппаратов .
Концепция РТК
Расстояние между приемником спутниковой навигации и спутником можно рассчитать по времени, которое требуется сигналу для прохождения от спутника к приемнику. Чтобы вычислить задержку, приемник должен выровнять псевдослучайную двоичную последовательность , содержащуюся в сигнале, с внутренне сгенерированной псевдослучайной двоичной последовательностью. Поскольку спутниковому сигналу требуется время, чтобы достичь приемника, последовательность сигналов спутника задерживается по отношению к последовательности приемника. Благодаря все большей задержке последовательности получателя обе последовательности в конечном итоге выравниваются.
Точность результирующего измерения дальности по существу является функцией способности электроники приемника точно обрабатывать сигналы со спутника, а также дополнительных источников ошибок, таких как несглаживаемые ионосферные и тропосферные задержки, многолучевое распространение, ошибки спутниковых часов и эфемерид .
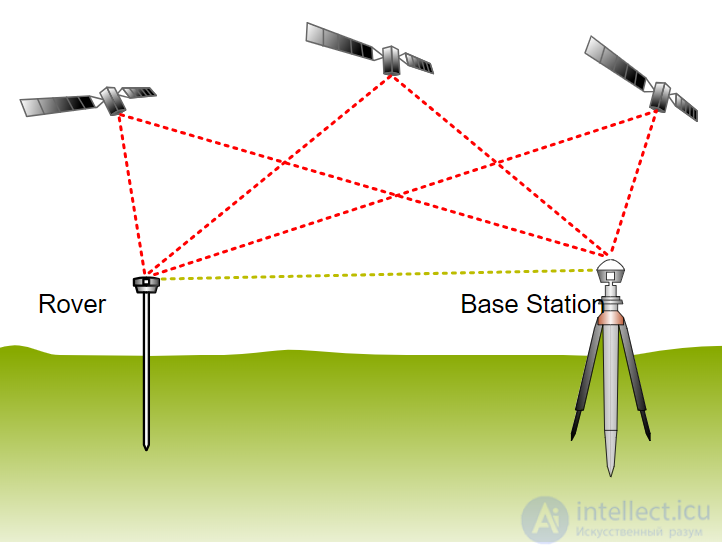
RTK следует той же общей концепции, но в качестве сигнала использует несущую спутникового сигнала , игнорируя содержащуюся в нем информацию. RTK использует фиксированную базовую станцию и ровер, чтобы уменьшить ошибку определения местоположения ровера. Базовая станция передает данные коррекции на марсоход.
Как описано в предыдущем разделе, дальность до спутника по сути рассчитывается путем умножения длины волны несущей на количество полных циклов между спутником и марсоходом и сложения разности фаз. Определение количества циклов является нетривиальной задачей, поскольку сигналы могут быть сдвинуты по фазе на один или несколько циклов. Это приводит к ошибке, равной ошибке оценки количества циклов, умноженной на длину волны, которая составляет 19 см для сигнала L1. Решение этой так называемой задачи поиска целочисленной неоднозначности приводит к точности до сантиметра. Погрешность можно уменьшить с помощью сложных статистических методов, которые сравнивают измерения сигналов C/A и сравнивают полученные диапазоны между несколькими спутниками.
Улучшение, возможное при использовании этого метода, потенциально очень велико, если продолжать предполагать точность блокировки в 1%. Например, в случае GPS код грубого обнаружения (C/A), который транслируется в сигнале L1, меняет фазу на частоте 1,023 МГц, но сама несущая L1 составляет 1575,42 МГц, что меняет фазу более тысячи раз. чаще. Таким образом, ошибка ±1% при измерении фазы несущей L1 соответствует ошибке ±1,9 мм при оценке базовой линии.

Настройка RTK
На практике системы RTK используют один приемник базовой станции и несколько мобильных устройств. Базовая станция ретранслирует фазу наблюдаемой несущей, а мобильные устройства сравнивают свои собственные измерения фазы с измерениями, полученными от базовой станции. Существует несколько способов передачи сигнала коррекции от базовой станции к мобильной станции. Самый популярный способ добиться недорогой передачи сигнала в реальном времени — использовать радиомодем , обычно в диапазоне УВЧ . В большинстве стран определенные частоты выделены специально для целей RTK. Большинство геодезического оборудования в стандартной комплектации имеет встроенный радиомодем УВЧ-диапазона. RTK обеспечивает повышение точности на расстоянии примерно до 20 км от базовой станции.
Это позволяет устройствам рассчитывать свое относительное положение с точностью до миллиметров, хотя их абсолютное положение имеет точность только с той же точностью, что и вычисленное положение базовой станции. Типичная номинальная точность этих систем составляет 1 сантиметр ± 2 части на миллион (ppm) по горизонтали и 2 сантиметра ± 2 ppm по вертикали.
Хотя эти параметры ограничивают полезность метода RTK для общей навигации, этот метод идеально подходит для таких задач, как геодезия. В этом случае базовая станция располагается в известном месте съемки, часто в эталоне , и затем мобильные устройства могут создать высокоточную карту, принимая поправку относительно этой точки. RTK также нашел применение в системах автопривода/автопилота, точном земледелии , системах управления машинами и в аналогичных целях.
Сети RTK расширяют возможности использования RTK на большую территорию, содержащую сеть опорных станций. Эксплуатационная надежность и точность зависят от плотности и возможностей сети опорных станций.
Сеть непрерывно действующих опорных станций (CORS) — это сеть базовых станций RTK, которые транслируют поправки, обычно через подключение к Интернету. В сети CORS точность повышается, поскольку наличие нескольких станций помогает обеспечить правильное позиционирование и защищает от ложной инициализации одной базовой станции.
Виртуальная опорная сеть (VRN) аналогичным образом может повысить точность без использования базовой станции
Поправки могут передаваться в формате RTCM SC-104 (коды сообщений 3, 18-21, 32, 1003—1008 ), CMR и CMR+, RTCA, ATOM. Требуемая скорость передачи — 2400 бит/с и более, задержка передачи — не более 0.5−2 секунд. Для обычного DGPS достаточно было скоростей 200 бит/с и задержек до 10 сек, для потоков информации в формате SSR требуется гораздо больше.
Начиная с версии 3.0 стандарт RTCM SC-104 включает возможность передачи RTK-поправок для системы ГЛОНАСС. Версии 2.3 и последующие 3.х не совместимы, поэтому существуют параллельно.
Версии 3.1 поддерживает различные форматы данных базовых станций RTK-Network (VRS, FKP и MAC), а также SSR-сообщения (точные эфемериды и параметры ухода часов).
В версии 3.2 (февраль 2013) добавляется сообщения Множественных Сигналов (Multiple Signal Messages (MSM)). Формат MSM позволяет приемнику использовать все спутниковые системы. Сообщения включают компактные и полные сообщения для псевдодальностей, фазовых измерений, отношения несущей (сигнала) к шуму (стандартное и высокое разрешение), частоту фазовых измерений.
В октябре 2016 года вышла версия RTCM 3.3 (обозначение RTCM 10403.3) в которой к принятым сообщениям для систем GPS, ГЛОНАСС, Galileo и QZSS добавлено BeiDou (BDS), а также объединены все предыдущие дополнения версий 3.х.
Форматы RTCM Традиционно подразделяются на две категории: Observation State Representation (OSR) и State Space Representation (SSR) Эти группы используют различные методы, механизмы доставки и основные технологии для решения одной и той же проблемы
Compact Measurement Record (CMR) — достаточно старый формат, он содержит информацию только от спутников GPS L1/L2. Разработан Trimble в 1992, как метод передачи данных кодовой и несущей фазовой коррекции в компактном формате от базовых станций GPS к GPS-роверам для съемки RTK GPS.
CMR+ — второе поколение CMR Trimble. Он имеет более компактную структуру сообщений, чем CMR. GPS-часть этого протокола изначально была собственностью Trimble, но позже была открыта и стала широко используемым стандартом.
CMRx был разработан в 2009 году для поддержки претерпевших значительные изменения созвездий GNSS. Цель CMRx состояла в том, чтобы улучшить время инициализации, охватить дополнительные созвездия ядра GNSS, иметь дело с новыми сигналами GNSS и улучшить производительность в городских условиях и c «закрытым небом».
RTX — собственный формат Trimble, который использует спутники связи для передачи данных коррекции RTK на ровер, а не наземные радиостанции или сотовые сети. Об этом говорит сайт https://intellect.icu . Поток данных фактически является данными коррекции CMRх. Улучшенное сжатие данных CMRх чрезвычайно важно для спутниковой системы, поскольку пропускная способность на спутнике довольно дорогая. Как и в случае с CMRх, это доступно только на приемниках Trimble.
Technical Commission for Aeronautics (RTCA) — формат разработанный Радиотехнической комиссией по аэронавтике США.
NCT — собственный формат данных коррекции компании John Deere. В 1999 году, когда точное сельское хозяйство только начало развиваться, John Deere приобрела производителя GNSS NavCom. Сегодня компания производит приемники как для сельского хозяйства, так и для других отраслей промышленности. Формат является аутентичным и поддерживается только приемники John Deere.

Одиночная база RTK
Single Base RTK (в переводе с англ. — «Одиночная база RTK») — базовая станция работающая в режиме RTK состоящая из 1 опорного приемника, микропроцессора и радио модема на УКВ. Может быть мобильной для целей геодезии и в редчайших случаях стационарной для целей навигации. Охват ограничивается локальными территориями до 40 км, от одиночной станции. По мере увеличения расстояния от базы — уменьшенная способность разрешать неоднозначности, что влияет на точность определения положения подвижного ровера. Точность достигает в плане: 0.01 m +/-0.5 ppm, и по вертикали: 0.02 m +/-1.0 ppm . Или 12 мм в плане и 60 мм по высоте, на максимальном удалении от базы.
Network RTK или Multiple reference station (в переводе с англ. — «множественные опорные станции») — Математическая модель конфигурации объединяющей в сеть 2 и более опорных GNSS-приемников (ОП), соединенных через линии связи (IP-адрес (интернет) или линии сотовой связи формата GSM) в единый комплекс. Опорные приемники непрерывно передают свои индивидуальные спутниковые наблюдения на сервер. Программное обеспечение сети точно разрешает неоднозначности спутников, которые наблюдаются опорными приемниками (ОП). Максимальное расстояние между OП не более 70 км друг от друга
Концепция RTK-Network применяется при создании Систем Дифференциальной коррекции в 2-х вариантах: геодезические системы СТП (Система Точного Позиционирования) и Контрольно-корректирующая станция (ККС) для навигационных систем. Обе конфигурации предполагают наличие центрального сервера (мощного процессора) для вычисления поправок и линий связи для сбора информации. Концепция RTK-Network позволяет моделировать (ожидать) основные ошибки на различных по площади областях с различным качеством (точностью).

ККС системы WAAS с 3-мя опорными приемниками
Контрольно-корректирующие станции или станции сбора измерений, представляющие собой комплекс высокоточной навигационной аппаратуры, спроектированный в избыточной конфигурации. Традиционно ККС содержит 2 и более опорных станции установленные в точках с известными координатами, что гарантирует надежность и автономность в случае сбоев и достоверность собираемой информации
Системы точного позиционирования, состоящие из референцных станций, представляют собой единую сеть. Данные, получаемые со станций, стекаются в вычислительный центр, включающий как соответствующие аппаратные, так и программные средства. Средства связи референцных станций обеспечивают постоянную передачу в вычислительный центр данных, которые автоматически архивируются и преобразовываются в формат RINEX. После формирования дифференциальных поправок средства связи вычислительного центра транслируют их авторизированным пользователям, работающим в режиме RTK . Такие системы развернуты в Германии, Швейцарии, Нидерландах, Франции, Дании, Швеции. . На территории России полностью охвачены Москва и Московская область, Санкт-Петербург и Ленинградская область, Свердловская и Самарская области. г. Севастополь и Калининград (с областью). 90 % покрытие имеют — Краснодарский край, республики Крым, Татарстан, Удмуртия и Чувашия, Омская и Воронежская, Курганская и Ростовская области. На 2019 год в России были представлены более 6 крупных компаний предлагающие услуги СТП (RTK-Net , PrinNet , Тopnet , SmartNet , eft-cors[ ,ССТП БТИ[ ) использующие оборудование различных фирм. Сети конкурируют и взаимодействуют на паритетных основах.
Сегодня, RTK сети, реализуют различные методы для создания точной корректировки, такие как, MAX и i-MAX, VRS или VBS и FKP
MAX и i-MAX (Master-Auxiliary corrections в переводе с англ. — «Мастер-вспомогательные поправки») Метод базируется на одноименной концепции МАС (Master Auxiliary Concept), предложенной совместно фирмами Leica Geosystems и Geo++ в 2001 г. Индивидуальные MAX (i-MAX) был разработан, чтобы поддержать старые приемники, которые не могут принимать поправок типа MAX.
Концепция заключается в корректировке координат ровера через ближайшую (условно главную мастер-станцию). Такая концепция позволяет роверу проявлять большую гибкость — ровер может всегда отслеживать RTK решение и менять свои расчеты в процессе движения.
Информация о поправках собирается с сети (нескольких завязанных на один сервер базовых станций) обрабатывается специализированным ПО, передается пользователю. Таким образом поправки MAX и i-MAX связывают базовый приемник с ровером и линия может быть измерена повторно .
VRS (Virtual Reference Station в переводе с англ. — «виртуальная референцная станция») или VBS(Virtual Base Station в переводе с англ. — «виртуальная базовая станция») — Метод виртуальной базовой станции разработан компанией Terrasat в конце 1990 годов. Данный метод также как и методы МАХ формирует поправки, симулируя RTK в режиме одиночной базовой станции — ровер передает на сервер приближенные координаты собственного положения (GGA сообщение), сервер автоматически генерирует условную (виртуальную) базу на расстоянии 10-15 метров от ровера, задав весовую оценку для каждой референц-станции как функцию расстояния до области работ (приемника принимающего поправки). Затем, с помощью специализированного ПО, запускается режим генерации поправок от виртуальной станции. Ровер начинает работу уже от виртуальной станции. В результате, получается один набор дифференциальных поправок, оптимизированный для данного района работ. Что не гарантирует единство измерений, а неоднократная генерация базовых станций посредством включения/выключения ровера приводит к скачкам положения. Однако VRS, позволяет достигать субсантиметровой точности на относительно больших расстояниях — 50-70 км в реальном времени, в равномерной по всей площади сети
Преимущества VRS или VBS.
FKP (Flächen Korrektur Parameter в переводе с нем. — «метод площадных поправок»)) Данный метод подразумевает расчет дифференциальных поправок на площади, охваченной несколькими базовыми станциями (площадь ожидаемых решений). Без учета предварительного положения подвижного спутникового приемника. Для предоставления поправок используется полином линейной области. Он относится к поверхности, которая определяется как параллельная эллипсоиду WGS-84 по высоте опорной станции то есть псевдодиапазона мобильного ровера. Из множества координат относящихся к сектору поверхности (площади ожидаемых решений) выбираются те, что соответствуют разности фазы несущей L1 и L2 частот соответственно можно вычислить псевдодиапазон, скорректированный на позиционно-зависимые ошибки.[
В конце 1990-х годов исследовательская группа астрономии и Геоматики (gAGE) из Технического университета Каталонии (UPC) предложила концепцию Wide Area RTK для решения ряда проблем. Основанную на разрешении неоднозначности фазы несущей в реальном времени. Которая позволяет расширить локальные службы, до широкого масштаба (то есть увеличить охват базовые линии между ровером и базовой станцией до 100 км), как для двух частотных, так и для мультисистемных приемников (одно частотные приемники, принципиально исключены). Методика основана на оптимальном сочетании точных ионосферных и геодезических моделей в сети постоянно действующих опорных станций. Основным фактором, ограничивающим расширение дальности действия метода RTK за пределы в нескольких десятков километров, является дифференциальная ионосферная коррекция между ровером и ближайшей опорной станцией ГНСС. Такая коррекция препятствует распространению неоднозначность в реальном времени, а следовательно, и поддержанию соответствующей точной навигации на субдециметровом уровне. То есть основные ошибки отсекаются. Основной погрешностью остается ионосферная и ее корреляции, смягчение которых становится главной проблемой, требующей решения, имеющая невесомое значение на фоне прочих. Метод был продемонстрирован на реальных данных, но до сих пор не был развернут, несмотря на то что, он увеличивает охват до 500—900 километров от базовой станции и в результате требуется в 100—1000 раз меньше приемников, охватывающих данный регион
Передача поправок с производится, через радио канал (на частотах 410—470 МГц для большинства устройств). База может быть как установлена на точку (пункт) с известными координатами так и ее координаты могут быть автономно, с осреднением координат на некотором временном интервале (обычно несколько минут). Во втором случае работа осуществляется с помощью калибровки участка работ по известным точкам в полевом ПО контроллера используемым для работы с роверным приемником. Встроенные в базовые приемники радиомодемы имеют мощность до 4-5 Вт и комплектуются компактными (до 30 см) антеннами для работы на небольших расстояниях. Для увеличения дальности работы применяют внешние радиомодемы мощностью до 35-40 Вт с отдельным питанием и бо́льшими по размеру антеннами (до нескольких метров), как правило на отдельном основании.
Достоинства:
Недостатки:
GSM — связь может быть обеспечена через: внутренний терминал приемника, внешний терминал подключаемый к приемнику через RS-232, через терминал полевого контроллера(актуально для ровера).
CSD (Circuit Switched Data в переводе с англ. — «Данные с Коммутацией Каналов»). Передача поправок с базовой станции производится напрямую, посредством «дозвона» ровера на номер сим-карты установленной в GMS терминале этой базы. До 2010 года пользовался популярность, но после 2010 сотовые операторы постепенно начали прекращать поддержку данного сервиса, оставляя его на одном из тарифов для IoT-устройств.
Достоинства:
Недостатки:
NTRIP (Networked Transport of RTCM via Internet Protocol в переводе с англ. — «Сетевой транспорт RTCM по интернет-протоколу»). Представлен в сентябре 2004 Немецким агентством картографии и геодезии (German Federal Agency for Cartography and Geodesy (BKG)) и дортмундским Университетом Компьютерных Технологий (Dortmund University Department of Computer Science DUDCS). Передача поправок с базовой станции производится через компьютер с белым (статическим) IP-адресом на котором установлен специальное ПО. Описание протокола определяет 4 базовых компонента системы:
Существуют приемники с интегрированным функционалом кастера, которые могут обеспечить небольшое число роверов (обычно до 10-30). Как правило устанавливаются стационарно подключаясь к сети интернет через роутер с настройкой переадресации портов, на которых настроен кастер, и прямым IP адресом.
Существуют интернет-сервисы предоставляющие функционал кастера с интуитивно понятной настройкой. Для работы потребуется своя или «дружественная» база с GSM и свой ровер, и небольшая абонентская плата (сопоставимая со стоимостью интернет тарифа мобильного оператора).
Достоинства:
Недостатки:
Аналогично NTRIP но отсутствует возможность управления потоками данных. В интернете стоит HTTP-подобный сервер способный принимать и отправлять данные по одному или нескольким портам без какого-либо разбора передаваемой информации.
Достоинства:
Недостатки:
Аналогично NTRIP, но передача поправок с базовой станции производится через интернет-сервис компании CHC.
Достоинства:
Недостатки:
RTK технология используется в большом количестве отраслей промышленности: в геодезии и земельном кадастре, строительстве, точном земледелии, мониторинге промышленных подвижных объектов и объектов капитального строения, высокоточной навигации (на земле, на воде и в воздухе).
Основным преимуществом режима является возможность получение координат с точностью до ~1 см в плане и до ~1,5 см по высоте в реальном времени.
RTK не работает при видимости менее 5 одних и тех же GPS-спутников одновременно на базе и на ровере. От исходных спутников . В виду чего RTK работать не может в глубоких каньонах, а также на застроенной территории при присутствия отраженного сигнала. и Стабильная работа RTK не гарантируется далее 20-30 км от базы (сам метод DGPS работает в небольшой области базы, обусловленный примерно однородным состоянием атмосферы).
Во время геомагнитных бурь может отсутствовать фиксированное решение (фиксированное решение — разрешены все фазовые неоднозначности — целое количество длин волн на линии спутник-приемник). Так как метод RTK основан на фазовых измерениях псевдодальностей, даже при соблюдении идеальных условий видимости спутников и небольшом расстоянии база-ровер.
Исследование, описанное в статье про rtk , подчеркивает ее значимость в современном мире. Надеюсь, что теперь ты понял что такое rtk и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Устройства приема и обработки радиосигналов, Передача, прием и обработка сигналов

Комментарии