Лекция
Привет, Вы узнаете о том , что такое получение визуальной информации человеком, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое получение визуальной информации человеком, система компьютерного зрения, регистрация визуальной информации , настоятельно рекомендую прочитать все из категории Методы и средства компьютерных информационных технологий.
Процесс получения визуальной информации человеком
Глаз человека – это очень тонкий прибор, предназначенный для приема и переработки всей световой информации, поступающей в глаз.
У человека формирование картинки осуществляется на сетчатке с последующей обработкой и записыванием ее в память в мозгу.

Рисунок 2 - Процесс получения визуальной информации человеком

Рисунок 3 – Работа зрительной системы человека
Видимый свет состоит из спектрального распределения электромагнитной энергии с длинами волн в диапазоне 400 - 700 нм. Волны за пределами этого диапазона называются ультрафиолетовыми (УФ) и инфракрасными (ИК). Именно с восприятия начинается обработка человеком графической, видео- и аудиоинформации. Согласно теории цветового зрения, цвет воспринимается рецепторами, светочувствительной сетчатой оболочки глаза палочками и колбочками способными воспринимать свет различных длин волн.
Трехкомпонентная теория Гельмгольца. Цветовое ощущение, обеспечиваемое тремя типами колб, чувствительных к одной части спектра (красной, зеленой или синей).
Теория Геринга. В колбах есть вещества чувствительные к бело-черному, красно-зеленому и желто-синему излучениям.
Таким образом человек в процессе обработки визуальной информации способен различать цвет, яркость, форму и размеры видимых им объектов.
При этом происходят физические, физиологические и психические процессы и участвует глаза, нервная система в т.ч. головной мозг.
Процесс получения визуальной информации системой компьютерного зрения
Системы компьютерного зрения во многом напоминают этапы обработки визуальной информации человеком но имеют существенные отличия и свои особенности, в зависимости от назначения системы и ее области применения (Рисунок 4)

Рисунок 4 - Процессы обработки визуальной информации человеком и компьютером
Системы компьютерного зрения
Реализация систем компьютерного зрения сильно зависит от области их применения, аппаратной платформы и требований по производительности. Некоторые системы являются автономными и решают специфические проблемы детектирования и измерения, тогда как другие системы составляют подсистемы более крупных систем, которые уже могут содержать подсистемы контроля механических манипуляторов (роботы), информационные базы данных (поиск похожих изображений), интерфейсы человек-машина и (компьютерные игры) т.д. Однако, существуют функции, типичные для многих систем компьютерного зрения (рисунок 5).

Рисунок -5 Процессы системы компьютерного зрения
Получение изображений: цифровые изображения получаются от одного или нескольких датчиков изображения, и которые помимо различных типов светочувствительных камер включают датчики расстояния, радары, ультразвуковые камеры и т. д. В зависимости от типа датчика, получающиеся данные могут быть обычным 2D изображением, 3D изображением или последовательностью изображений. Значения пикселей обычно соответствуют интенсивности света в одной или нескольких спектральных полосах (цветные или изображения в оттенках серого), но могут быть связаны с различными физическими измерениями, такими как глубина, поглощение или отражение звуковых или электромагнитных волн, или ядерным магнитным резонансом.
Предварительная обработка: перед тем, как методы компьютерного зрения могут быть применены к видеоданным с тем, чтобы извлечь определенную долю информации, необходимо обработать видеоданные, с тем чтобы они удовлетворяли некоторым условиям, в зависимости от используемого метода. Примерами являются:
Повторная выборка с тем, чтобы убедиться, что координатная система изображения верна
Удаление шума с тем, чтобы удалить искажения, вносимые датчиком
Улучшение контрастности, для того, чтобы нужная информация могла быть обнаружена
Масштабирование для лучшего различения структур на изображении
Выделение деталей: детали изображения различного уровня сложности выделяются из видеоданных. Типичными примерами таких деталей являются:
Линии, границы и кромки
Локализованные точки интереса, такие как углы, капли или точки: более сложные детали могут относиться к структуре, форме или движению.
Детектирование/Сегментация: на определенном этапе обработки принимается решение о том, какие точки или участки изображения являются важными для дальнейшей обработки. Об этом говорит сайт https://intellect.icu . Примерами являются:
Выделение определенного набора интересующих точек
Сегментация одного или нескольких участков изображения, которые содержат характерный объект
Высокоуровневая обработка: на этом шаге входные данные обычно представляют небольшой набор данных, например набор точек или участок изображения, в котором предположительно находится определенный объект. Примерами являются:
Проверка того, что данные удовлетворяют условиям, зависящим от метода и применения
Оценка характерных параметров, таких как положение или размер объекта
Классификация обнаруженного объекта по различным категориям
Особенности регистрации визуальной информации в системе обработки изображений
Следует выделить само определение термина изображения с точки зрения его обработки и основные операции выполняемые над мим.
Под изображением будем понимать функцию двух вещественных переменных  , где I – это интенсивность (яркость) в точке с координатами (x,y) . Иногда обработке будет подвергаться не все изображение, а некоторая его часть, которую в англоязычной литературе принято называть region-of-interest, ROI (область представляющая интерес, ОПИ).
, где I – это интенсивность (яркость) в точке с координатами (x,y) . Иногда обработке будет подвергаться не все изображение, а некоторая его часть, которую в англоязычной литературе принято называть region-of-interest, ROI (область представляющая интерес, ОПИ).
Для обработки на компьютере изображение должно быть дискретизировано и квановано. Дискретизованное и квантованное изображение называется цифровым. Цифровое изображение A(m,n) представлено в дискретном двумерном пространстве, где m – номер строки, а n – номер столбца. Элемент, расположенный на пересечении m-ой строки и n-го столбца называется пиксел (pixel – picture element). Интенсивность пиксела может описываться либо вещественным или целым числом. Относительная интенсивность в вещественных числах обычно изменяется от 0 до 1, а в целых числах от 0 до 255.
Обычно физический сигнал, возникающий в точке (x.y) , является функцией зависящей от многих параметров ( z- глубина,λ – длина волны, t – время). Однако мы будем
рассматривать статические, и чаще монохроматические изображения.
ПРЕДСТАВЛЕНИЕ ИЗОБРАЖЕНИЙ В ЦИФРОВОЙ ФОРМЕ
Для осуществления цифровой обработки изображений необходимо выполнить преобразование непрерывного (аналогового) сигнала изображений в цифровой массив. Такое преобразование включает выполнение двух преобразований. Первое преобразование представляет замену реального непрерывного изображения набором отсчетов в дискретные моменты времени, такое преобразование называется дискретизацией. Второе - это преобразование непрерывного множества значений сигнала изображения в множество квантованных значений, такое преобразование называется квантованием (рисунок 6).
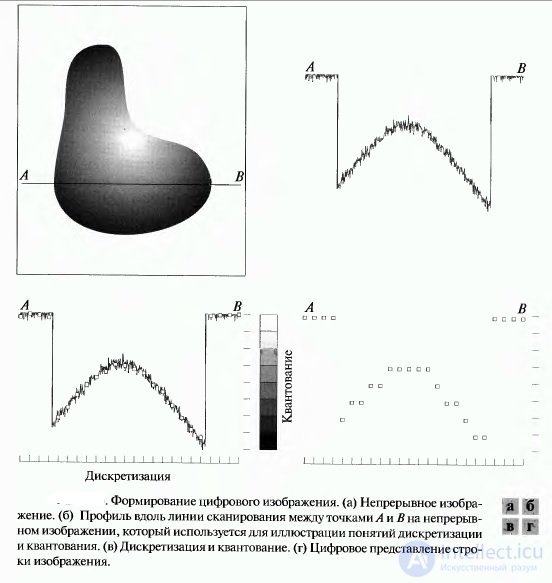
Дискретизация изображений.
Пространственная дискретизация изображения предполагает формирование непрерывной функции в дискретных отсчетах пространственных координат. Пусть функция fI(x, y) описывает исходное непрерывное изображение бесконечных размеров. В идеальной системе дискретизации изображения пространственные отсчеты исходного
изображения получаются путем перемножения этой функции с пространственно дискретизирующей функцией, состоящей из бесконечного числа δ - функций Дирака, заданных в узлах решетки с шагом (Δx,Δy ) :

где m,n∈Z, Z- множество целых чисел
Обратная операция, позволяющая из цифрового массива получить непрерывное изображение, называется восстановлением непрерывных изображений. Из отсчетов функции f(x,y) можно получить непрерывное изображение путем линейной пространственной интерполяции или с помощью линейной пространственной фильтрации дискретизованного изображения. шаг дискретизации не должен превышать половины
периода пространственной гармоники, соответствующей самым мелким деталям изображения. Если
 , то выборка
, то выборка
осуществляется с частотой Котельникова, вдвое превышающей наивысшую частоту спектра исходного изображения. В тех случаях, когда пространственная частота дискретизации выбрана в соответствии с теоремой Котельникова, исходное изображение можно точно восстановить путем пространственной фильтрации отсчетов с помощью соответствующего фильтра
Квантование изображений.
Для получения цифрового сигнала из непрерывного сигнала необходимо кроме дискретизации по времени произвести квантование по амплитуде. Квантование состоит в том, что непрерывному по амплитуде сигналу ставится в соответствие конечное множество целочисленных значений сигнала, пропорциональных непрерывному
значению.
Для этого динамический диапазон сигнала f=[ fmin , fmax ] разбиваетсяна конечное число интервалов - интервалов квантования. Каждому интервалу ставится в соответствие одно значение, называемое уровнем квантования, кодируемое двоичным кодом. Все значения сигнала, попадающие в некоторый интервал, обозначаются одним числом,определенным для данного интервала.
Оптические датчики
Оптические датчики — небольшие по размерам электронные устройства, способные под воздействием электромагнитного излучения в видимом, инфракрасном и ультрафиолетовом диапазонах подавать единичный или совокупность сигналов на вход регистрирующей или управляющей системы. Оптические датчики реагируют на непрозрачные и полупрозрачные предметы, водяной пар, дым, аэрозоли.
Оптические датчики являются разновидностью бесконтактных датчиков, так как механический контакт между чувствительной областью датчика (сенсором) и воздействующим объектом отсутствует. Данное свойство оптических датчиков обуславливает их широкое применение в автоматизированных системах управления. Дальность действия оптических датчиков намного больше, чем у других типов бесконтактных датчиков.
Оптические датчики называют еще оптическими бесконтактными выключателями, фотодатчиками, фотоэлектрическими датчиками.
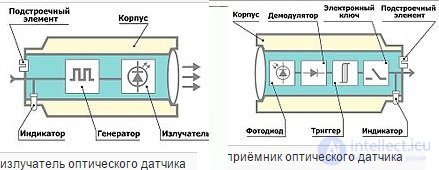
Излучатель датчика состоит из: Корпус,Излучатель,Подстроечный элемент,Генератор,Индикатор
Приемник датчика состоит из:Корпус,Фотодиод,Подстроечный элемент,Электронный ключ,Триггер,Демодулятор,Индикатор
По типу устройства оптические датчики делятся на моноблочные и двухблочные. В моноблочных излучатель и приемник находятся в одном корпусе. У двухблочных датчиков источник излучения и приемник оптического сигнала расположены в отдельных корпусах.
По принципу работы выделяют три группы оптических датчиков:
тип T — датчики барьерного типа (прием луча от отдельно стоящего излучателя)
тип R — датчики рефлекторного типа (прием луча, отраженного катафотом)
тип D — датчики диффузионного типа (прием луча, рассеянно отраженного объектом)
Принципы работы и устройство приемников света на ПЗС

Раcположение светоприемных элементов (прямоугольники синего цвета) в ПЗС-линейке и ПЗС-матрице.
Действие ПЗС можно описать следующим образом: каждый светочувствительный элемент - пиксель - работает как копилка для электронов. Электроны возникают в пикселях под действием света, пришедшего от источника. В течение заданного интервала времени каждый пиксель постепенно заполняется электронами пропорционально количеству попавшего в него света, как ведро, выставленное на улицу во время дождя. По окончании этого времени электрические заряды, накопленные каждым пикселем, по очереди передаются на "выход" прибора и измеряются. Все это возможно за счет определенной структуры кристалла, где размещаются светочувствительные элементы, и электрической схемы управления.
Практически точно так же работает и ПЗС-матрица. После экспонирования (засветки проецируемым изображением) электронная схема управления прибором подает на него сложный набор импульсных напряжений, которые начинают сдвигать столбцы с накопленными в пикселях электронами к краю матрицы, где находится аналогичный измерительный ПЗС-регистр, заряды в котором сдвигаются уже в перпендикулярном направлении и попадают на измерительный элемент, создавая в нем сигналы, пропорциональные отдельным зарядам. Таким образом, для каждого последующего момента времени мы можем получить значение накопленного заряда и сообразить, какому пикселю на матрице (номер строки и номер столбца) он соответствует.
Видеокамера
Видеока́мера — первоначальное значение — комбинация телевизионной передающей камеры и устройства для видеозаписи. Впоследствии, слово «видеокамера» практически вытеснило слова «телевизионная камера» и «телекамера» (ТВ-камера), заменив их. Впервые слово «видеокамера» стало использоваться применительно к миниатюрным ручным телекамерам, предназначенным для записи домашнего видео на бытовой видеомагнитофон. После появления комбинации передающей ТВ-камеры и видеомагнитофона — камкордеров (англ. camcorder), предназначенных для тележурналистики (англ. ENG — electronic news gathering), слово «видеокамера» вошло и в профессиональный обиход.
Аппаратная часть видеокамер
Что касается аппаратной составляющей устройства видеокамер, то тут, как и для фотоаппаратов имеет значение тип применяемой матрицы, оптическая система (объектив), процессор, отвечающий за обработку изображения и звука, питание видеокамеры, дисплей, система стабилизации и многое другое.
видеокамера ccd - устройство видеокамеры
Например, матрица видеокамеры. Только в видеокамерах может применяться система сразу из трех матриц, каждая из которых используется для записи своего канала цвета.
Светочувствительные матрицы (сенсоры) бывают двух основных типов ― CCD (ПЗС) и CMOS (КМОП).
1) CCD (Charge-Coupled Device) матрица ― чип памяти, чувствительный к синему, красному и зеленому цветам. Используется в технологии сканирования в качестве оптических приемников. Изготовливается по технологии «приборов с зарядовой связью» (ПЗС).
2) CMOS (Complementary Metal-Oxide-Semiconductor) матрица ― светочувствительная матрица, изготовленная по технологии металл-оксид-полупроводник структура (КМОП), сенсорная технология - конвертирует свет в электронные сигналы.

Рис. Структурная схема матриц ПЗС и КМОП.
матрицы CMOS намного дешевле по сравнению с CCD-матрицами. На основе технологии CMOS можно делать сенсоры с большим количеством мегапикселей, и стоить они будут недорого (по сравнению с CCD). Но шумы CMOS-матрицы не дают изображение такого качества, которое имеют камеры с CDD-матрицами.
В заключение, эта статья об получение визуальной информации человеком подчеркивает важность того что вы тут, расширяете ваше сознание, знания, навыки и умения. Надеюсь, что теперь ты понял что такое получение визуальной информации человеком, система компьютерного зрения, регистрация визуальной информации и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Методы и средства компьютерных информационных технологий
Комментарии
Оставить комментарий
Методы и средства компьютерных информационных технологий
Термины: Методы и средства компьютерных информационных технологий