Лекция
Привет, сегодня поговорим про естественные объекты, обещаю рассказать все что знаю. Для того чтобы лучше понимать что такое естественные объекты, автомат с линейной тактикой, доверчивый автомат, автомат кринского, осторожный автомат крылова, коллектив автоматов , настоятельно рекомендую прочитать все из категории Искусственный интеллект.
Цель - построить техническую систему, реализующую механизм обучения и самообучения. Система должна реализовать не худшую способность к обучению, чем живое существо. Для этого требуется исследовать, как обучаются живые существа.
естественные объекты
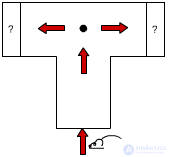
рис.3.1 T - образный лабиринт
Рассмотрим T - образный лабиринт (рисунок 3.1). В него заводится зверюшка. Заранее она не знает, что ожидает в каждой из сторон лабиринта, пища или удар электрического тока (поощрение или наказание). Опыт повторяется многократно. Сначала справа всегда была пища, а слева ток. Зверюшка бежала случайно только первые несколько раз, затем она обучалась и шла к пище. Опыт усложнили: теперь еда и наказание были в обеих частях лабиринта, но выбирались они с определенной постоянной вероятностью. Справа Р = 0.4, слева - 0.9, где Р - вероятность штрафа. Вместо детерминированной среды зверюшка попадала в вероятностную детерминированную среду. В результате опыта зверюшка шла направо - она улавливала как рационально поступать в новых условиях. Затем ее поместили вероятностную недетерминированную среду, т.е. в вероятность штрафа стала изменяться во времени.
P(t). Зверюшка переучивалась и здесь.
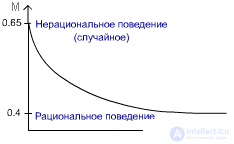
рис.3.2
Для нерационального поведения характерно то, что выбор направления осуществляется случайно. С равными вероятностями зверюшка может убежать и направо, и налево: M = 0.5*0.9 + 0.5*0.4 = 0.65 Для рационального поведения: M = 0*0.9 + 1*0.4 = 0.4 Способность к обучению можно измерять рациональностью поведения. E = (Pл,Pп), где E -среда, Pл,Pп - вероятности наказания средой при действиях d1,d2 соответственно. В нашем случае d1 - пойти налево, d2 - пойти направо. Среда двухкомпонентная, т.к. возможны только два действия.
Задача: спроектировать техническое устройство, с целесообразным поведением в заранее неизвестной среде.
автомат с линейной тактикой
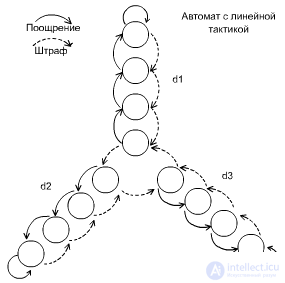
Автомат с линейной тактикой был предложен в свое время и изучен М.Л. Цетлиным , который рассмотрел его поведение в вероятностной среде, наказывающей или поощряющей автомат за совершенное действие с некоторыми фиксированными вероятностями.
Первой конструкцией был автомат с линейной тактикой — автомат с двумя состояниями, который в одном состоянии выдает на выходе сигнал о том, что он совершает действие d1, в другом — о том, что он совершает действие d2. За ошибочное действие автомат штрафуется и переводится в другое состояние, а за верное поощряется и сохраняет свое состояние, после чего действие повторяется.
Обучающийся автомат должен минимизировать суммарный штраф за все время своей жизни. Простейший автомат превращается в автомат с линейной тактикой после того, как увеличивается количество состояний, в которых он выполняет одинаковое действие. С современных позиций работы Цетлина можно отнести к обучению с подкреплением (reinforcement learning), когда модель обучается по обратной связи при взаимодействии с внешней средой.
Автомат описывается парой чисел. Первое - количество действий автомата, и второе - глубина лепестка (q). Приведенный автомат описывается как (3,4). Об этом говорит сайт https://intellect.icu . q - базовый параметр, аналог инертности. Чем q больше, тем целесообразнее ведет себя автомат. У человека q находится в пределах от 3 до 5. Чем q больше, тем хуже объект приспосабливается к часто меняющейся среде. Для нестационарной среды лучше аппараты с меньшим q, для стационарной с большим q.
Доверчивый автомат ( автомат кринского )
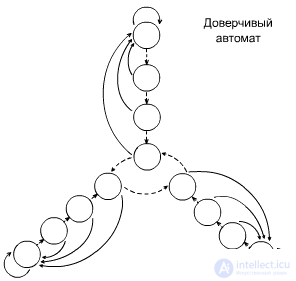

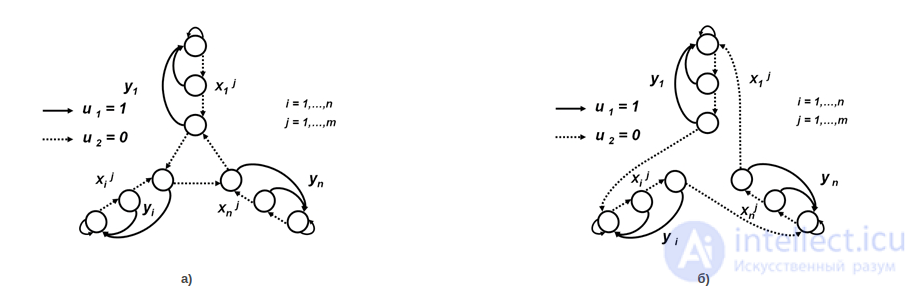
Рис. 7. Диаграммы переходов доверчивого автомата Кринского (а)) и автомата Роббинса (б))
При поступлении сигнала штраф, поведение этого автомата аналогично поведению автомата с линейной тактикой Цетлина, но при получении сигнала поощрения, этот автомат, независимо в каком состоянии лепестка он находился в данный момент, переходит в самое глубокое состояние данного лепестка. Этот автомат, как будто, склонен верить в хорошее, и положительный сигнал среды приводит его в состояние «эйфории».
Строго доказано, что автоматы Кринского ведут себя целесообразно в любых стационарных случайных средах.
Может сложиться ощущение, что любые меры по увеличению числа инерционности автомата, улучшает показатель целесообразности поведения автомата.
Ситуация качественно меняется, если наш линейный автомат имеет дело с динамической средой. Если смена сред происходит достаточно быстро, то инерционность вряд ли может служить хорошим средством для существования в этом мире. Ведь в динамическом мире надо быстро следить за возникающими изменениями среды, и для любого динамического мира необходима своя глубина памяти, выбранная в зависимости от скорости изменения обстановки.
Автомат с линейной тактикой, но при поощрениях доверяет не сразу, а с вероятностью 0.5 определяет верить или нет поощрению.
Можно построить нецелесообразный автомат. Например, "Иван-дурак" - автомат с двумя действиями (плакать и смеяться) и глубиной - 1.

рис.3.5
Опишем еще одну конструкцию автомата, обеспечивающего целесообразное поведение в любой стационарной среде и дающего возможность построить асимптотически оптимальную последовательность автоматов, позволяющую получать минимальный возможный штраф в данной среде с любой наперед заданной точностью. В отличие от ранее рассмотренных конструкций этот автомат будет не детерминированным, а вероятностным. Устроен он подобно автомату с линейной тактикой. При поступлении сигнала нештраф смена состояний в нем происходит так, как показано на рис. 2.3. Но при сигнале штраф такой автомат не спешит менять состояние. Сначала он «подбрасывает монетку» и по результату подбрасывания либо переходит в состояние по пунктирной стрелке, показанной на рис. 2.3, либо сохраняет то состояние, в котором автомат получил сигнал штраф. Эта конструкция, предложенная В. Ю. Крыловым, может быть названа «осторожным» автоматом.
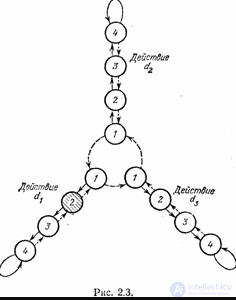
рис 2.3
На рисунке 3.6 показан график зависимости целесообразности от глубины с учетом частоты изменения среды. Лучше всего настраивать величину q в зависимости от среды.

рис.3.6
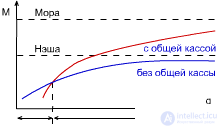
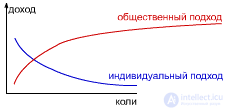
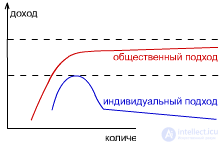
Но можно ли сыграть в устойчивую игру Мора? Т.е. получить максимальную общественную выгоду, при этом сохраняя устойчивое состояние. Для этого требуется сыграть в игру с общей кассой: все играют в игру Мора, но затем все делится поровну.
Если автоматы имеют большой q, то им выгоднее играть в игру Мора, т.к. они более инерционные; и наоборот - если q низкий, то в игру Нэша, т.к. они более активные.
Надеюсь, эта статья об увлекательном мире естественные объекты, была вам интересна и не так сложна для восприятия как могло показаться. Желаю вам бесконечной удачи в ваших начинаниях, будьте свободными от ограничений восприятия и позвольте себе делать больше активности в изученном направлени . Надеюсь, что теперь ты понял что такое естественные объекты, автомат с линейной тактикой, доверчивый автомат, автомат кринского, осторожный автомат крылова, коллектив автоматов и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Искусственный интеллект

Комментарии