Лекция
Привет, сегодня поговорим про синтетическая психология распознавание, обещаю рассказать все что знаю. Для того чтобы лучше понимать что такое синтетическая психология распознавание, классификация меры сходства , настоятельно рекомендую прочитать все из категории Искусственный интеллект.
Синтетическая психология На фото черепашка Грея Уолтера Иногда синтез осуществить легче, чем анализ. Трудно понять, как работает на низком уровне мозг, но можно попробовать имитировать поведение как <вход-выход>. Цель этого направления - создание имитаторов поведения. Такие имитаторы создавались различными группами исследователей - Амосов, Брайтенберг, Уолтер и другие. На нижних уровнях машины имитировали простейшие эмоции и поведение (страх), на верхних - более абстрактные и сложные (предчувствие, любовь). На самой простой модели можно увидеть интересные психологические реакции. |
||||||||||||||||||||||||||||||||||
|
Рассмотрим "Черепаху" Г. Уолтера, названную им "Машина спекулятрикс", что означает "думающая машина". "Черепаха" представляет собой трехколесную тележку, на которой размещены аккумуляторы, система реле и электронная (ламповая) схема. Переднее колесо расположено на рулевой колонке и приводится в действие двумя двигателями - рулевым Д1 и приводным Д2. Об этом говорит сайт https://intellect.icu . На рулевой колонке закреплен также фотоэлемент и осветительная лампочка, свет от которой не попадает на фотоэлемент. Тележка покрыта кожухом, напоминающим по форме черепаший панцирь и оставляющим открытым лишь фотоэлемент и лампочку. Вокруг кожуха размещения упругий бампер, прикосновение к которому замыкает механический контакт K1. |
||||||||||||||||||||||||||||||||||
|
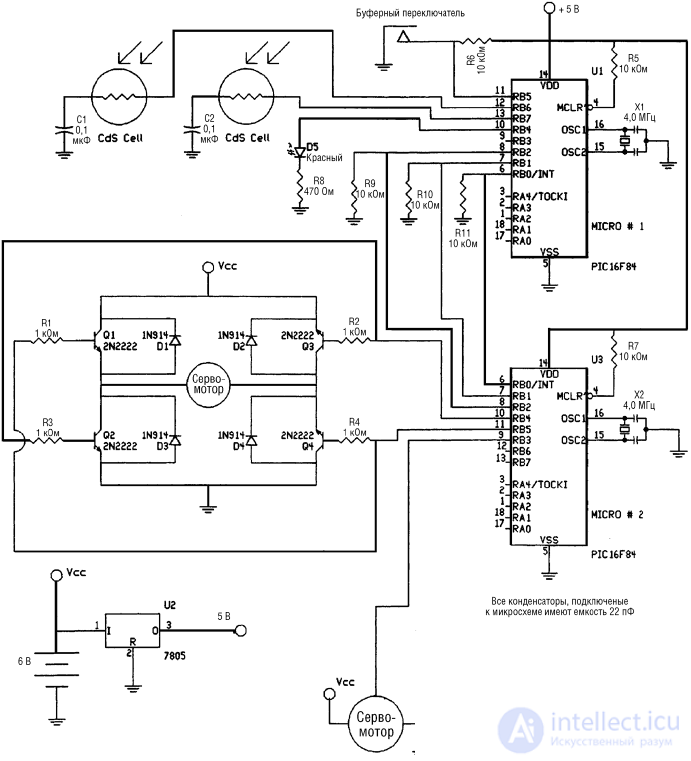
Принципиальная схема "Черепахи" приведена на рисунке 12.1. |
||||||||||||||||||||||||||||||||||

рис.12.1
|
||||||||||||||||||||||||||||||||||
|
Рис. 8.16. Принципиальная электрическая схема робота-черепахи
"Черепаха" с такой схемой способна воспроизводить следующие виды поведения: движение на свет или от него, поисковые движения, обход препятствии, движение к "кормушке" и заход в нее для подзарядки аккумуляторов. Схема отрегулирована таким образом, что при низком потенциале анода лампы Л1 запирается лампа Л2 и реле Р2 устанавливается так, что исключается одновременное нахождение под током реле P1 и Р2. Если фотоэлемент ФЭ не освещен, то лампа Л2 открыта, а Л1заперта. При умеренном освещении фотоэлемента лампа Л2 "приоткрывается", однако проводимый ею ток недостаточен для срабатывания реле P1, хотя уменьшение напряжения на аноде лампы и приводит к отпусканию реле Р2. Дальнейшее увеличение освещенности фотоэлемента ("ослепление") ведет к срабатыванию P1 при отпущенном Р2. Замыкание механического контакта K1 превращает схему в мультивибратор, попеременно включающий и выключающий реле Р1 и Р2. |
||||||||||||||||||||||||||||||||||
|
Поведение "Черепахи" зависит от внешних воздействий, т.е. от состояний реле и характеризуется следующей таблицей. |
||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||
|
Несмотря на относительную простоту устройства, "Черепаха" демонстрирует достаточно разнообразные виды поведения. В нормальных условиях она осуществляет "поиск", двигаясь по формируемым ею и средой траекториям, и в течении часа способна исследовать довольно большую комнату. При попадании на фотоэлемент света она либо приближается к источнику света (при слабом свете или разрядившихся батареях), либо отходит от него (при сильном "ослепляющем" свете). При наезде на препятствие - независимо от того, какой другой раздражитель действовал - автомат реагирует только на прикосновение, являющееся более сильным раздражителем, и отходит от препятствия. После совершения отходного маневра он продолжает двигаться под влиянием оставшегося раздражителя. "Черепаха" способна отыскивать оптимальное для себя состояние, которым является поиск в слабо освещенных местах. Лампа Л3, расположенная в передней части устройства, позволяет ей в отсутствие других источников света "узнавать" себя в зеркале, приближаясь к своему изображению. Таким же образом два автомата могут "увидеть" друг друга и двигаться навстречу. При частичной разрядке аккумуляторов способность избегать "ослепления" ослабевает и "Черепаха" приближается к "кормушке", в которой установлен источник света, и, соприкасаясь с контактами зарядного устройства в ней, "насыщается", а затем (возникало "ослепление") отходит от нее и продолжает нормальную деятельность. Ниже приведены примеры различного поведения "Черепахи": поиск в отсутствие яркого света, стремление к не очень сильному источнику света, поведение при наличии двух сильных источников света, обход препятствия при стремлении к свету, стремление к одному источнику света двух одинаковых автоматов, посещение "кормушки", поведение перед зеркалом и "знакомство" двух "Черепах". Легко видеть, что поведение автомата во многом аналогично комплексу фиксированных действий, наблюдаемых в поведении живых организмов. Заметим, что, точные траектории движений заранее установить невозможно. В каждом отдельном случае они определяются рядом случайных факторов, таких, как шероховатость и наклоны поверхности, по которой движется автомат, трение в подвижных его частях, разброс моментов срабатывания реле и т. п. |
||||||||||||||||||||||||||||||||||
|
О машинках Брайтенберга - автоматах с синтетической психологией можно прочитать болееподробно... |
||||||||||||||||||||||||||||||||||
|
Всего было построено 14 уровней подобных животных. На третьем уровне удалось реализовать схему "хищник-жертва". На четвертом - машины отличали живое от неживого, огибали препятствия. На пятом реализовывали простейшее обучение. На 6-8 уровнях научились обобщать. На 14 - вырабатывали шкалу ценностей, находили линию наискорейшего достижения цели, создавали внутреннюю модель мира. |
||||||||||||||||||||||||||||||||||
|
Существенный недостаток - нет самопроизводства и эволюции. |
||||||||||||||||||||||||||||||||||
Распознавание и классификацияОдно из важнейших интеллектуальных свойств. Все устройства, реализующие это свойство должны иметь три блока. |
||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||
|
Задача состоит в отделении образца типа А от образца типа Б, для этого требуется ввести физическую величину, которая бы отличала образцы различных типов. Очевидно, что эта величина будет иметь целый диапазон значений и выбирая некоторый индетифицирующий признак мы можем столкнутся с проблемой перекрытия (верхний график), то есть с ситуацией наличия этого признака у обоих образцов. Поэтому требуется развернуть базовые оси, чтобы проекции различных классов пересекались минимально (нижний график). |
||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||
|
Задача интеллекта - найти линии разделения классов. Для лучшего результата требуется вводить дополнительные признаки. Каждый полезен хотя бы для одного разделения и влияет на уменьшение вероятности ошибки. Наилучшими признаками являются те, у которых разность средних выше стандартных отклонений. Признак будет бесполезным, если средние совпадают со средними другого признака. Очень много признаков увеличивает вероятность ошибки. |
||||||||||||||||||||||||||||||||||
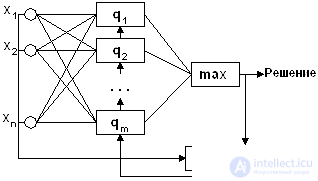
рис.12.4
Признаки (x1..xn) анализируются разделяющими функциями (q1..qm). Решение поступает с устройства сравнения. |
||||||||||||||||||||||||||||||||||
Меры сходстваxij - значение i-ой переменной для j-го объекта.1.Коэффициент корреляции 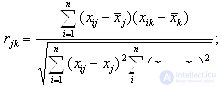 2.Меры расстояния а)Евклидово 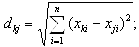 б)Манхеттенское 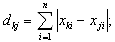 в)Минковского  3.Коэффициент ассоциативности а) S = ( a + d )/( a+ b + c + d ); б) J = a/( a + b + c ); в) Kас = ( ad - bc )/( ad + bc ); |
||||||||||||||||||||||||||||||||||
Вау!! 😲 Ты еще не читал? Это зря!
* А. К. Дьюдни. Машинки Брайденберга – автоматы с синтетической психологией. (http://myrobot.ru/articles/stuff_braitenberg.php)
* Черепашки Грея Уолтера (http://www.myrobot.ru/articles/hist_walter_tortoises.php)
* Владимир Редько. Эволюционная биокибернетика "Компьютерра" №11 от 16 марта 1999 г. (http://www.computerra.ru/offline/1999/289/2525/)
* История робототехники: черепашки Грея Уолтера. (http://www.myrobot.ru/articles/hist_walter_tortoises.php)
* А. К. Дьюдни Машинки Брайтенберга – автоматы с синтетической психологией
(http://myrobot.ru/articles/stuff_braitenberg.php)
* Д. Деннет. Виды психики (http://psylib.org.ua/books/dennd01/txt07.htm)
* V. Braitenberg "Vehicles: Experiments in Synthetic Psychology", A Bradford Book / The MIT Press, 1984 ISBN 0262521121(В. Брайтенберг. Движущиеся средства (устройства, машинки)): эксперименты с синтетической психологией)
* Michael R. W. Dawson Minds and Machines: Connectionism and Psychological Modeling 2008 (Chapter 6. First Steps Toward Synthetic Psychology)
* Luc-Laurent Salvador What is Synthetic Psychology? (http://www.synthetic-psychology.org/blogs/?p=17)
* Терехин А.Т., Будилова Е.В., Качалова Л.М., Карпенко М.П. Нейросетевое моделирование когнитивных функций мозга: обзор основных идей // Психологические исследования: электрон . науч. журн. 2009 - N 2(4) . (http://psystudy.ru/index.php/component/content/article/1-n2-4/26-terekhin4.html#e3)
* Michael R. W. Dawson. From Embodied Cognitive Science To Synthetic Psychology. 2002
ISBN:0-7695-1724-2
Надеюсь, эта статья об увлекательном мире синтетическая психология распознавание, была вам интересна и не так сложна для восприятия как могло показаться. Желаю вам бесконечной удачи в ваших начинаниях, будьте свободными от ограничений восприятия и позвольте себе делать больше активности в изученном направлени . Надеюсь, что теперь ты понял что такое синтетическая психология распознавание, классификация меры сходства и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Искусственный интеллект


Комментарии