Лекция
Сразу хочу сказать, что здесь никакой воды про зондирующие сигналы, и только нужная информация. Для того чтобы лучше понимать что такое зондирующие сигналы, ошибки измерения дальности, ошибки измерения угловых координат , настоятельно рекомендую прочитать все из категории Радиотехнические системы.
зондирующие сигналы - это специально созданные электромагнитные сигналы, которые используются для исследования или зондирования среды или объектов в целях получения информации о их свойствах или структуре. Они могут быть использованы в различных областях, таких как радиолокация, медицинская диагностика, геофизика, сейсмология и других.
Зондирующие сигналы обычно имеют известные характеристики и специально выбираются для определенных задач исследования. Они могут быть непрерывными (непрерывно-волновыми) или импульсными (импульсно-волновыми) и иметь различные частоты, формы, длительности и амплитуды в зависимости от поставленной задачи.
Применение зондирующих сигналов позволяет получать информацию о различных параметрах среды или объектов, таких как расстояние, размеры, форма, состав, электрические свойства, движение и другие. Отраженный, рассеянный или пропущенный сигнал, полученный после взаимодействия среды или объекта с зондирующим сигналом, анализируется для получения информации и решения поставленных задач.
Примеры зондирующих сигналов включают радарные импульсы, медицинские ультразвуковые сигналы, сейсмические волны, радиочастотные сигналы в беспроводных коммуникациях, радиолокация и другие. Зондирующие сигналы являются важным инструментом для исследования и диагностики различных систем и явлений, а также для получения информации о неизвестных или недоступных объектах и средах.
В радиолокационных системах в зависимости от их предназначения находят применения различные виды зондирующих сигналов:
Выбор того или иного вида зондирующего сигнала зависит от характера решаемых радиолокационной системой задач и условий ее функционирования.
В РЛС РТВ, как и в большинстве РЛС иного назначения применяется импульсные зондирующие сигналы.
Применение импульсных зондирующих сигналов позволяет:
Основными параметрами зондирующих сигналов являются:
 (несущая частота колебаний
(несущая частота колебаний  );
); (средняя за период повторения мощности
(средняя за период повторения мощности  );
); ;
; (
( );;
);; .
.По своей структуре зондирующие радиоимпульсы могут быть:
Одиночные радиоимпульсы, как правило, не применяются. Обнаружение цели и измерение ее координат обычно осуществляется на основе анализа группы отраженных от цели радиоимпульсов – «пачки», содержащей M сигналов.
Радиоимпульсы называются некогерентными если начальная фаза высокочастотных колебаний от импульса к импульсу является случайной величиной.
Радиоимпульсы называются когерентными (от лат. «cohaerentia » - сцепление, связь), если начальная фаза колебаний каждого радиоимпульса одинаковая или изменяется от импульса к импульсу по определенному закону.
Простыми (или узкополосными) называются радиоимпульсы, у которых произведение ширины спектра  и длительности импульса
и длительности импульса  составляют величину порядка единицы:
составляют величину порядка единицы:  . Импульсный сигнал называется сложным (или широкополосным), если произведение называемое базой сигнала
. Импульсный сигнал называется сложным (или широкополосным), если произведение называемое базой сигнала  .
.
Достоинством узкополосных сигналов является относительная простота их формирования и оптимальной обработки. Формирование узкополосных импульсов обеспечивается сравнительно простой импульсной модуляцией генератора СВЧ. Обработка принимаемых эхо-сигналов также осуществляется сравнительно просто, поскольку квазиоптимальным фильтром является усилитель промежуточной частоты приемника с согласованной шириной полосы пропускания:  . Такой квазиоптимальный фильтр по сравнению с оптимальным дает проигрыш в отношении «сигнал/шум» по мощности всего в 1,2 раза.
. Такой квазиоптимальный фильтр по сравнению с оптимальным дает проигрыш в отношении «сигнал/шум» по мощности всего в 1,2 раза.
Простые зондирующие сигналы в импульсных РЛС находят широкое применение и в настоящее время (в РЛС старого парка) ввиду простоты технической реализации устройств генерирования и обработки.
Однако простые зондирующие сигналы имеют существенные недостатки, ограничивающие тактико-технические характеристики РЛС.
В последние годы в радиолокаторах все шире стали применяться сложные зондирующие сигналы преимущественно двух видов:
радиоимпульсы с внутриимпульсной частотной модуляцией, в частности, с линейной частотной модуляцией (ЛЧМ) или нелинейной частотной модуляцией (НЧМ);
радиоимпульсы с фазовой манипуляцией, при которой фаза колебаний внутри импульса через определенные интервалы времени скачком изменяется на 180°. Поскольку эти скачкообразные изменения фазы происходят по определенному двоичному коду, такие импульсы называются фазокодоманипулированными (ФКМ).
По сравнению с простыми радиоимпульсами формирование и обработка сложных радиоимпульсов представляет собой более сложную задачу, но применение таких сигналов позволяет существенно повысить качественные характеристики РЛС.
Рассмотрим влияние характеристик, параметров и структур зондирующих радиоимпульсов на тактико-технические характеристики РЛС РТВ.
Известно, что максимальная дальность действия РЛС при отсутствии организованных помех определяется соотношением:
 (3.3)
(3.3)
где  - энергия излучаемого сигнала;
- энергия излучаемого сигнала;
 - коэффициент усиления передающей антенны;
- коэффициент усиления передающей антенны;
 - эффективная площадь приемной антенны;
- эффективная площадь приемной антенны;
 - эффективная поверхность рассеяния (ЭПР) цели;
- эффективная поверхность рассеяния (ЭПР) цели;
 - коэффициент различимости (необходимое отношение «сигнал/шум» по мощности на выходе оптимального фильтра):
- коэффициент различимости (необходимое отношение «сигнал/шум» по мощности на выходе оптимального фильтра):
 ,
,
 - спектральная плотность мощности собственных шумов радиоприемного устройства, пересчитанная по его входу;
- спектральная плотность мощности собственных шумов радиоприемного устройства, пересчитанная по его входу;
 - энергия принимаемого сигнала при обнаружении цели на максимальной дальности с заданными показателями качества.
- энергия принимаемого сигнала при обнаружении цели на максимальной дальности с заданными показателями качества.
Величина  называется так же параметром обнаружения. Он определяется по кривым обнаружения исходя из заданных значений показателей качества обнаружения – вероятности правильного обнаружения D и вероятности ложной тревоги F.
называется так же параметром обнаружения. Он определяется по кривым обнаружения исходя из заданных значений показателей качества обнаружения – вероятности правильного обнаружения D и вероятности ложной тревоги F.
Выясним, как влияют параметры зондирующего сигнала на дальность действия РЛС.
Энергия излучаемого сигнала определяется выражением
 ,
,
где  - число импульсов в пачке, которыми облучатся цель за время ее нахождения в главном лепестке ДНА РЛС.
- число импульсов в пачке, которыми облучатся цель за время ее нахождения в главном лепестке ДНА РЛС.
Из последнего выражения видно, что для увеличения дальности действия РЛС необходимо увеличивать:
импульсную мощность передатчика  ;
;
длительность зондирующего сигнала  ;
;
число импульсов в пачке  .
.
Однако возможности по увеличению этих параметров имеют ограничения. Увеличение импульсной мощности  сопровождается повышением требований к электрической прочности тракта передачи электромагнитной энергии от передатчика к антенне, а так же приводит к снижению скрытности РЛС и защищенности ее от самонаводящегося оружия.
сопровождается повышением требований к электрической прочности тракта передачи электромагнитной энергии от передатчика к антенне, а так же приводит к снижению скрытности РЛС и защищенности ее от самонаводящегося оружия.
Увеличение длительности зондирующего импульса (если это простой радиоимпульс) приводит к снижению разрешающей способности по дальности и защищенности РЛС от пассивных помех.
Для увеличения числа импульсов  в пачке необходимо либо повышать частоту повторения
в пачке необходимо либо повышать частоту повторения  зондирующих сигналов, что связано с уменьшением однозначного измерения дальности:
зондирующих сигналов, что связано с уменьшением однозначного измерения дальности:
 ,
,
либо уменьшать скорость обзора по азимуту, либо увеличивать ширину ДНА в горизонтальной плоскости, поскольку
 ,
,
где  - ширина ДНА в радианах;
- ширина ДНА в радианах;
 - период обзора (время одного оборота антенны).
- период обзора (время одного оборота антенны).
Заметим, что увеличение ширины ДНА влечет за собой ухудшение защищенности РЛС от пассивных помех и активных помех и разрешающей способности по азимуту.
При оценке влияния длинны волны на дальность действия РЛС необходимо учесть, что в радиолокации, как правило, используется одна и та же антенна на передачу и прием. В таком случае эффективная площадь  и коэффициент усиления
и коэффициент усиления  антенны связаны соотношением:
антенны связаны соотношением:
 .
.
Поэтому выражение (3.3) можно переписать следующим образом:
 (3.4)
(3.4)
Непосредственно из формулы (3.4) следует, что при  увеличение длинны волны приводит к уменьшению дальности. Однако при изменении длинны волны остальные величины входящие в формулу (3.4), не остаются постоянными. Так, от длинны волны зависит среднее значение ЭПР цели
увеличение длинны волны приводит к уменьшению дальности. Однако при изменении длинны волны остальные величины входящие в формулу (3.4), не остаются постоянными. Так, от длинны волны зависит среднее значение ЭПР цели  . В метровом диапазоне волн она больше, чем в дециметровом и тем более в сантиметровом, поэтому увеличение длинны волны приводит к увеличению дальности действия РЛС. Кроме того, с увеличением длинны волны отражение от подстилающей поверхности также увеличивают дальность действия РЛС на средних и больших высотах, но уменьшают дальность обнаружения целей на малых высотах.
. В метровом диапазоне волн она больше, чем в дециметровом и тем более в сантиметровом, поэтому увеличение длинны волны приводит к увеличению дальности действия РЛС. Кроме того, с увеличением длинны волны отражение от подстилающей поверхности также увеличивают дальность действия РЛС на средних и больших высотах, но уменьшают дальность обнаружения целей на малых высотах.
Спектральная плотность мощности шума  в радиодиапазоне определяется соотношением
в радиодиапазоне определяется соотношением
 ,
,
где  - постоянная Больцмана;
- постоянная Больцмана;
 - абсолютная температура приемника (в градусах Кельвина);
- абсолютная температура приемника (в градусах Кельвина);
 - собственный коэффициент шума приемника;
- собственный коэффициент шума приемника;
 - шумовая температура антенны, которая учитывает прием мешающих излучений в зависимости от длинны волны, форма ДНА и ее ориентации.
- шумовая температура антенны, которая учитывает прием мешающих излучений в зависимости от длинны волны, форма ДНА и ее ориентации.
Отношение  называется относительной эффективной шумовой температурой антенны.
называется относительной эффективной шумовой температурой антенны.
В диапазоне метровых волн (при ) величина
) величина  рассчитывается по эмпирической формуле:
рассчитывается по эмпирической формуле:  . Например, при
. Например, при  ,
,  . Собственный коэффициент шума малошумящих приемников составляет величину
. Собственный коэффициент шума малошумящих приемников составляет величину  .
.
Следовательно, в метровом диапазоне необходимо учитывать шумы внешних источников, так как  существенно зависит от частоты, а, значит, и спектральная плотность мощности шумов. Чем выше рабочая частота РЛС (короче длинна волны), тем меньше влияние внешних шумов. В дециметровом и сантиметровом диапазонах влиянием внешних шумов можно пренебречь.
существенно зависит от частоты, а, значит, и спектральная плотность мощности шумов. Чем выше рабочая частота РЛС (короче длинна волны), тем меньше влияние внешних шумов. В дециметровом и сантиметровом диапазонах влиянием внешних шумов можно пренебречь.
Затухания радиоволн в тропосфере, вызываемые рассеянием и поглощением электромагнитной энергии в тропосфере, оказывает заметные влияния на дальность действия РЛС. Так дальность действия РЛС с учетом затухания определяется выражением
 (3.5)
(3.5)
где  и
и  - максимальная дальность действия РЛС без учета и с учетом затухания радиоволн соответственно;
- максимальная дальность действия РЛС без учета и с учетом затухания радиоволн соответственно;
 - коэффициент затухания.
- коэффициент затухания.
Уравнение (3.5) трансцендентное и его можно решит графически, определяя, например, точку пересечения функций  и
и  ,
,
где  .
.
На рис.3.21. представлены кривые решений уравнений (3.5) для однородной трассы в виде зависимости дальности действия РЛС в километрах  (ось ординат) в атмосфере от дальности действия РЛС в свободном пространстве
(ось ординат) в атмосфере от дальности действия РЛС в свободном пространстве  (ось абсцисс) для различных значений коэффициента затухания
(ось абсцисс) для различных значений коэффициента затухания  .
.
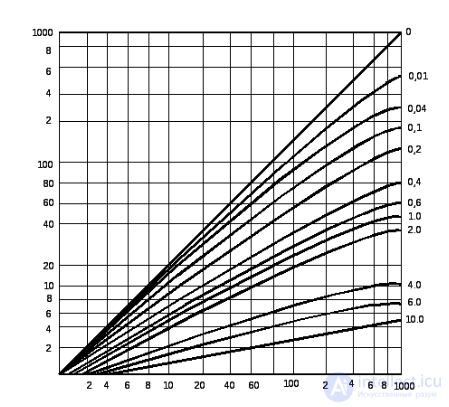
Рис.3.21. Об этом говорит сайт https://intellect.icu . Зависимость дальности действия РЛС в однородной атмосфере от дальности действия в свободном пространстве для различных значений коэффициента затуханий  .
.
Величину коэффициента затухания  можно оценить по графикам рис.3.22. и 3.23. Из рис.3.22. видно, что при длинах волн, близких к одному сантиметру, имеются резонансные максимумы поглощения электромагнитной энергии. Данный фактор определяется особенностями структуры молекул: 1,35 см, 1,5 мм, 0,75 мм – в водяных парах и 0,5 см, 0,25 см – в кислороде. Именно дипольные молекулы кислорода и паров воды, а так же частицы конденсированной влаги и пыли вызывают затухания радиоволн в тропосфере.
можно оценить по графикам рис.3.22. и 3.23. Из рис.3.22. видно, что при длинах волн, близких к одному сантиметру, имеются резонансные максимумы поглощения электромагнитной энергии. Данный фактор определяется особенностями структуры молекул: 1,35 см, 1,5 мм, 0,75 мм – в водяных парах и 0,5 см, 0,25 см – в кислороде. Именно дипольные молекулы кислорода и паров воды, а так же частицы конденсированной влаги и пыли вызывают затухания радиоволн в тропосфере.
Затухание радиоволн в ионосфере возникает за счет появления колебательного движения свободных электронов под воздействием электромагнитной энергии. Основная доля энергии колебаний переизлучается, но часть ее из-за соударений преобразуется в кинетическую энергию хаотического движения атомов и ионов. Затухание значительно, если одновременно велики и концентрация свободных электронов, и концентрация нейтральных атомов и ионов. Численно затухание  в децибелах на километр приближенно выражается соотношением
в децибелах на километр приближенно выражается соотношением
 ,
,
где  - эффективная частота столкновений электронов с нейтральными атомами или ионами (Гц);
- эффективная частота столкновений электронов с нейтральными атомами или ионами (Гц);
 - концентрация электронов (
- концентрация электронов ( )
)
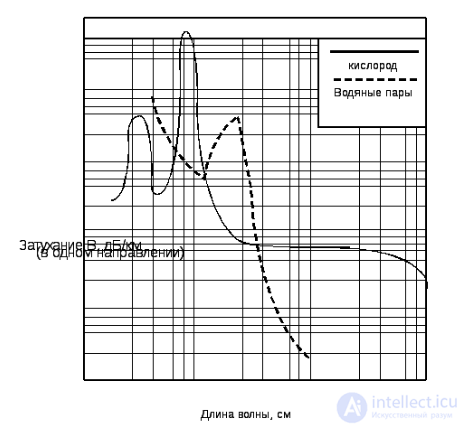
Рис.3.22. Зависимости коэффициента затухания  от длинны волны для кислорода (сплошная линия) и паров воды (пунктирная линия).
от длинны волны для кислорода (сплошная линия) и паров воды (пунктирная линия).
Представление о возможном порядке величины  в ионосфере можно получить из таблицы
в ионосфере можно получить из таблицы
|
Высота, км. |
65 - 70 |
80 |
95 |
120 |
300 |
|
|
|
|
|
|
|
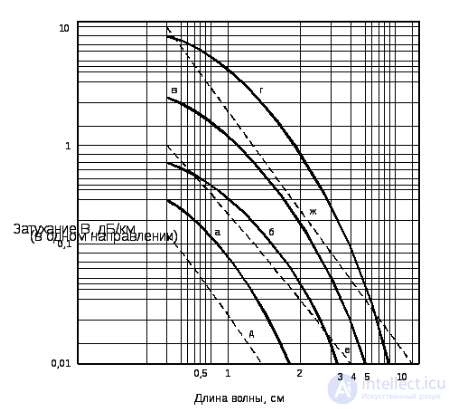
Рис.3.23. Зависимости коэффициента затухания  от длинны волны для дождя и тумана.
от длинны волны для дождя и тумана.
Сплошные кривые показывают величину затухания обусловленного дождем с интенсивность: а – 0,25 мм/час (моросящим); б – 1 мм/час (слабым); в – 4 мм/час (средней силы); г – 16 мм/час (сильным).
Пунктирные линии показывают величину затухания в тумане или облаках: д – 0,032 г/м³ (видимость 600 м); е – 0,32 г/м³ (видимость 130 м); ж – 2,3 г/м³ (видимость 30 м).
Из рис.3.22., 3.23. следует, что если исключить случай возвратно-наклонной локации, то в радиолокационном диапазоне частот затухания в ионосфере пренебрежимо мало (доли дБ). Для РЛС дальнего обнаружения нецелесообразно применять волны короче 10 см. Чем больше должна быть дальность действия РЛС тем больше должна быть длинна волны с точки зрения обеспечения допустимого затухания электромагнитной энергии на пути распространения.
Из приведенных выше рассуждений следует, что зависимость дальности действия РЛС от длинны волны радиоимпульса имеет сложный и неоднозначный характер.
Точность измерения координат целей является одной из важнейших характеристик РЛС, определяющих ее возможности при решении задач целеуказания активным родам войск ПВО и ВВС и наведения истребителей.
Ошибка измерения представляет собой разность между истинным и измеренным значениями параметра  :
: ,
,
где  - измеренное значение (оценка) параметра.
- измеренное значение (оценка) параметра.
Ошибки измерений делятся на грубые промахи, систематические и случайные ошибки. Грубые и систематические ошибки в принципе можно устранить. Случайные ошибки можно минимизировать, но полностью устранить невозможно. Они обусловлены наличием помех на входе приемного устройства, его собственными шумами, флюктуациями сигнала, несовершенством выполнения и нестабильностями в элементах и устройствах РЛС.
Качественными показателями точности измерения координат целей, наиболее широко использующимися на практике, являются:
 ;
; ;
; ;
; .
.Средняя квадратическая ошибка при произвольном законе распределения плотности вероятности  определяется из соотношения
определяется из соотношения
 при
при  (3.6)
(3.6)
Условие  означает, что систематическая ошибка отсутствует, закон распределения ошибок в силу влияния множества факторов, обычно принимается нормальным
означает, что систематическая ошибка отсутствует, закон распределения ошибок в силу влияния множества факторов, обычно принимается нормальным  .
.
В этом случае средняя квадратическая ошибка пологостью характеризует другие виды ошибок. Вероятность того, что ошибка  не превышает значения
не превышает значения  , равна
, равна
 ,
,
где  - гауссовский интеграл ошибок;
- гауссовский интеграл ошибок;
 - табулированная функция (например, И.Н.Броншейн, К.А.Семендяев «Справочник по математике для инженеров и учащихся ВТУЗов» таблица 1.1.2.6.2).
- табулированная функция (например, И.Н.Броншейн, К.А.Семендяев «Справочник по математике для инженеров и учащихся ВТУЗов» таблица 1.1.2.6.2).
Количественное значение вероятности равно для:
 ;
; ;
; ;
; ;
;Можно показать, что связь между ошибками определяется следующими соотношениями:  ;
;  ;
;  .
.
При цифровой обработке радиолокационные сигналы подвергаются дискретизации по времени и амплитуде, что приводит к дополнительным ошибкам измерения координат. Закон распределения ошибок дискретизации – равновероятный, т.е. плотность распределения вероятности ошибки  , где
, где  - шаг или интервал дискретизации.
- шаг или интервал дискретизации.
В соответствии с (3.6) средняя квадратическая ошибка дискретизации
 .
.
Откуда
 . (3.7)
. (3.7)
В общем случае средняя квадратическая измерения независимой координаты (дальности, азимута или угла места) определяется соотношением:
 , (3.8)
, (3.8)
где  - потенциальная ошибка измерения координаты;
- потенциальная ошибка измерения координаты;
 - ошибка, обусловленная особенностями распространения радиоволн в атмосфере;
- ошибка, обусловленная особенностями распространения радиоволн в атмосфере;
 - инструментальная ошибка, обусловленная неидеальностью работы элементов и узлов РЛС, а так же способом измерения;
- инструментальная ошибка, обусловленная неидеальностью работы элементов и узлов РЛС, а так же способом измерения;
 - динамическая ошибка, обусловленная изменением местоположения цели за время измерения.
- динамическая ошибка, обусловленная изменением местоположения цели за время измерения.
Потенциальная ошибка измерения характеризует предельно достижимую точность и определяется отношением сигнал/шум и шириной спектра зондирующего сигнала
 ,
,
где  - эффективная ширина спектра зондирующего сигнала; (для радиоимпульса с колокольной огибающей
- эффективная ширина спектра зондирующего сигнала; (для радиоимпульса с колокольной огибающей  .
.  - ширина спектра сигнала на уровне 0,46);
- ширина спектра сигнала на уровне 0,46);
 - отношение сигнал/шум на выходе оптимального фильтра (или на входе измерительного устройства)
- отношение сигнал/шум на выходе оптимального фильтра (или на входе измерительного устройства)
 - скорость света.
- скорость света.
Для повышения потенциальной точности измерения дальности до цели необходимо, как и для увеличения дальности действия РЛС, увеличивать энергию принимаемого сигнала и снижать спектральную плотность мощности шума приемника.
Кроме того, для повышения потенциальной точности измерения дальности до цели (уменьшения  ) необходимо увеличивать ширину спектра зондирующего сигнала, что в случае простых радиоимпульсов требует из укорочения, а, следовательно, приводит к снижению энергии сигнала. Таким образом, при использовании простых радиоимпульсов возникает противоречие, разрешить которое оказывается возможным применением сложномодулированных сигналов.
) необходимо увеличивать ширину спектра зондирующего сигнала, что в случае простых радиоимпульсов требует из укорочения, а, следовательно, приводит к снижению энергии сигнала. Таким образом, при использовании простых радиоимпульсов возникает противоречие, разрешить которое оказывается возможным применением сложномодулированных сигналов.
На практике потенциальная ошибка измерения дальности в РЛС обнаружения даже при использовании сравнительно узкополосных сигналов не превышает, как правило, значений  и составляет незначительную часть (10…15%) от общей ошибки измерения дальности при визуальном съеме информации. При автоматическом измерении координат целей * может вносить существенный вклад в общую ошибку измерения.
и составляет незначительную часть (10…15%) от общей ошибки измерения дальности при визуальном съеме информации. При автоматическом измерении координат целей * может вносить существенный вклад в общую ошибку измерения.
Остальные составляющие ошибки измерения дальности из выражения (3.8) от структуры зондирующего сигнала прямо не зависит, поэтому в данной главе подробно не рассматривается.
Потенциальная ошибка измерения угловой координаты определяется формой и шириной диаграммы направленности антенны в соответствующей плоскости, отношением сигнал/шум на входе измерительного устройства и способом измерения координат. В общем случае
 ,
,
где  - ширина ДН антенны в соответствующей плоскости;
- ширина ДН антенны в соответствующей плоскости;
 - коэффициент пропорциональности, зависящий от формы ДН и способа измерения угловой координаты
- коэффициент пропорциональности, зависящий от формы ДН и способа измерения угловой координаты  .
.
Числовое значение коэффициента  составляет:
составляет:  - при измерении углового положения цел методом линейного сканирования луча ДН (используется при измерении азимута цели в обзорных РЛС и угла места в радиовысотомерах);
- при измерении углового положения цел методом линейного сканирования луча ДН (используется при измерении азимута цели в обзорных РЛС и угла места в радиовысотомерах);  - при измерении
- при измерении  методом парциальных диаграмм (в трехкоординатных РЛС).
методом парциальных диаграмм (в трехкоординатных РЛС).
В РЛС метрового диапазона на границе зоны обнаружения потенциальная ошибка измерения азимута из-за широкой ДН в азимутальной плоскости может быть значительной. Так при  на границе зоны обнаружения
на границе зоны обнаружения  .
.
Для повышения точности измерения угловой координаты (уменьшения  ) необходимо также, как и в случае измерения дальности, увеличивать отношение сигнал/шум
) необходимо также, как и в случае измерения дальности, увеличивать отношение сигнал/шум  на выходе оптимального фильтра, и, кроме того, сужать диаграмму направленности. При фиксированных размерах антенны это достигается уменьшением длинны волны
на выходе оптимального фильтра, и, кроме того, сужать диаграмму направленности. При фиксированных размерах антенны это достигается уменьшением длинны волны .
.
Остальные составляющие ошибки измерения угловой координаты цели (см. выражение (3.8)) прямо от параметров зондирующего сигнала не зависят.
Разрешающая способность РЛС по координатам определяет полноту сведений о воздушной обстановке при наличии большого числа целей (точечных и распределенных) в зоне обзора РЛС и влияет на возможности РЛС по вскрытию группового состава целей, а так же на помехозащищенность РЛС от пассивных помех.
Под разрешающей способностью РЛС по какой либо координате понимают такое минимальное различие в данной координате у двух целей при совпадении у них других координат, при котором цели наблюдаются раздельно.
Данное определение в общем случае не является строгим, поскольку не оговариваются показатели качества разрешения. В реальных условиях, когда процессы радиолокационного обнаружения и разрешения сопровождаются мешающим шумом, необходимо говорить о статическом разрешении, т.е. о разрешении целей с заданной вероятностью или допустимым снижением качества обнаружения.
Различают потенциальную и реальную разрешающие способности.
Потенциальная разрешающая способность характеризует предельно достижимое разрешение и определяется соотношением сигнал/шум и протяженностью сечения тела неопределенности (двумерной автокорреляционной функции) зондирующего сигнала РЛС по параметру разрешения. Чем больше отношение сигнал/шум и меньше протяженность тела неопределенности по соответствующему параметру, тем при всех прочих равных условиях выше потенциальная разрешающая способность РЛС.
Реальная разрешающая способность всегда хуже потенциальной. К факторам, ухудшающим разрешающую способность, относятся:
Рассмотрим далее зависимость потенциальной разрешающей способности РЛС от параметров зондирующих сигналов с помощью анализа соответствующих двумерных автокорреляционных функций.
Известные схемы оптимальной (согласованной) обработки радиолокационных сигналов базируются на операции вычисления корреляционного интеграла (модульного значения)
 (3.9)
(3.9)
здесь  - комплексная амплитуда зондирующего сигнала;
- комплексная амплитуда зондирующего сигнала;
 - комплексная амплитуда ожидаемого сигнала с учетом запаздывания
- комплексная амплитуда ожидаемого сигнала с учетом запаздывания  и доплеровской добавки частоты
и доплеровской добавки частоты  , знак минус в показателе степени экспоненты учитывает, что при радиальной скорости
, знак минус в показателе степени экспоненты учитывает, что при радиальной скорости  (удаляющаяся цель) частота отраженного сигнала менее частоты зондирующего.
(удаляющаяся цель) частота отраженного сигнала менее частоты зондирующего.
Величина принимаемого сигнала  является, в общем случае, суммой комплексных амплитуд сигнала и помехи:
является, в общем случае, суммой комплексных амплитуд сигнала и помехи:
 , (3.10)
, (3.10)
где  и
и  - истинные значения запаздывания и доплеровской частоты полезного сигнала. С учетом (3.10) модуль (3.9) сводится к модулю суммы двух комплексных величин
- истинные значения запаздывания и доплеровской частоты полезного сигнала. С учетом (3.10) модуль (3.9) сводится к модулю суммы двух комплексных величин
 (3.11)
(3.11)
Первая величина  при неслучайной амплитуде сигнала является неслучайной и выражается зависящим от сигнала интегралом:
при неслучайной амплитуде сигнала является неслучайной и выражается зависящим от сигнала интегралом:
 (3.12)
(3.12)
Вторая является случайной величиной, тем меньшей, чем слабее помеха, и выражается интегралом:
 (3.13)
(3.13)
Сигнальный интеграл (3.12) и его модульное значение представляют собой функции разностей ожидаемого  и истинного
и истинного  времени запаздывания, ожидаемой
времени запаздывания, ожидаемой  и истинной
и истинной  доплеровских частот.
доплеровских частот.
 (3.14)
(3.14)
где  ,
,  .
.
Вычислим функцию  . Для этого произведем замену переменной
. Для этого произведем замену переменной  в интеграле (3.12) и множитель
в интеграле (3.12) и множитель  вынесем за знак интеграла. Заменяя модуль произведения произведением модулей, где
вынесем за знак интеграла. Заменяя модуль произведения произведением модулей, где
 ,
,
получим
 (3.15)
(3.15)
Функция  называется двумерной автокорреляционной функцией сигнала. Она зависит от своих разностных аргументов
называется двумерной автокорреляционной функцией сигнала. Она зависит от своих разностных аргументов  ,
,  и не зависит от значений
и не зависит от значений  и
и  . Кроме того, функция
. Кроме того, функция  зависит от вида комплексной огибающей когерентного сигнала
зависит от вида комплексной огибающей когерентного сигнала  .
.
Как и диаграммы направленности антенн, автокорреляционные функции сигналов могут быть нормированы. Поскольку
 ,
,
где  - энергия сигнала, то
- энергия сигнала, то
 (3.16)
(3.16)
Функцию  называют нормированной двумерной автокорреляционной функцией сигнала.
называют нормированной двумерной автокорреляционной функцией сигнала.
Изображение двумерной автокорреляционной функцией сигнала для колокольного радиоимпульса с постоянной мгновенной частотой представлена на рис.3.24.
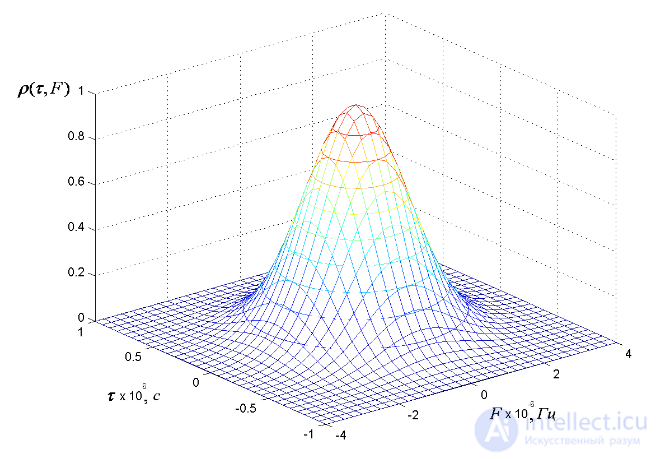
Рис.3.24. Изображение двумерной автокорреляционной функции сигнала
Рассмотрим свойства автокорреляционной функции сигнала:
свойство центральной симметрии  ;
;
значение  находится в пределах
находится в пределах ,
,  ;
;
каждое сечение  плоскостью с фиксированными значениями
плоскостью с фиксированными значениями  и
и  можно рассматривать как выход корреляционной схемы оптимальной обработки или оптимального фильтра, когда на них поступает сигнал без помехи, параметры которого (время запаздывания и частота) отличаются от ожидаемых на
можно рассматривать как выход корреляционной схемы оптимальной обработки или оптимального фильтра, когда на них поступает сигнал без помехи, параметры которого (время запаздывания и частота) отличаются от ожидаемых на  и
и  соответственно.
соответственно.
По аналогии с (3.16) можно записать
 (3.17)
(3.17)
где  - комплексный амплитудно-частотный спектр сигнала.
- комплексный амплитудно-частотный спектр сигнала.
Сечение  вертикальной плоскостью
вертикальной плоскостью , следует из (2.17), описывается выражением
, следует из (2.17), описывается выражением
 (3.18)
(3.18)
и является преобразованием Фурье от квадрата амплитудно-частотного спектра сигнала. При ограниченной ширине спектра сигнала  это сечение имеет вид импульса длительностью
это сечение имеет вид импульса длительностью  (рис.3.25.), которую в литературе называют мерой разрешающей способности по времени запаздывания (по дальности).
(рис.3.25.), которую в литературе называют мерой разрешающей способности по времени запаздывания (по дальности).
Рис.3.25. Сечение нормированной двумерной АКФ плоскостью 
Рассмотрим задачу разрешения сигналов по времени (по дальности), анализируя сигналы на выходе оптимального фильтра.
Пусть отраженный от сосредоточенных вторичных излучателей прямоугольные импульсы без внутриимпульсной модуляции обрабатываются оптимально и сдвинуты во времени на
 ,
,
где  - расстояние между вторичными излучателями. На рис.3.26. показаны огибающие выходных импульсов оптимального фильтра.
- расстояние между вторичными излучателями. На рис.3.26. показаны огибающие выходных импульсов оптимального фильтра.
Величина минимального интервала  определяется возможностью раздельного наблюдения смежных импульсов. В рассматриваемом случае в качестве условной меня разрешающей способности по времени можно принять значение
определяется возможностью раздельного наблюдения смежных импульсов. В рассматриваемом случае в качестве условной меня разрешающей способности по времени можно принять значение  , при котором максимуму огибающей сигнала, отраженного от одной цели соответствует нулевое значение огибающей импульса от другой. Соответственно мерой разрешающей способности по дальности называют
, при котором максимуму огибающей сигнала, отраженного от одной цели соответствует нулевое значение огибающей импульса от другой. Соответственно мерой разрешающей способности по дальности называют  .
.
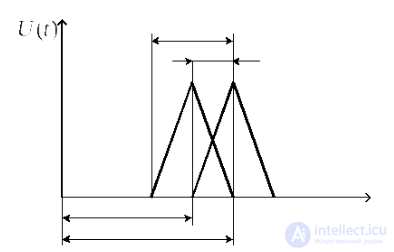
Рис.3.26. Огибающие отраженных радиоимпульсов от двух близких по дальности целей
Таким образом, потенциальная разрешающая способность РЛС по дальности определяется как
 (3.19)
(3.19)
и зависит от ширины спектра сигнала.
Потенциальная разрешающая способность по угловым координатам определяется шириной диаграммы направленности антенны в соответствующей плоскости по уровню половинной мощности  .
.
Для увеличения потенциальной разрешающей способности необходимо, как и при измерении угловых координат, увеличивать отношение сигнал/шум  на входе измерительного устройства (повышать энергию зондирующего сигнала и, следовательно, отраженного сигнала), а так же уменьшать угловые размеры диаграммы направленности антенны. Последнее, при неизменных размерах антенны, достигается уменьшением длинны волны
на входе измерительного устройства (повышать энергию зондирующего сигнала и, следовательно, отраженного сигнала), а так же уменьшать угловые размеры диаграммы направленности антенны. Последнее, при неизменных размерах антенны, достигается уменьшением длинны волны  (повышением несущей частоты) зондирующего сигнала.
(повышением несущей частоты) зондирующего сигнала.
Обобщенной мерой разрешающей способности импульсной РЛС по дальности и угловым координатам является импульсный объем, в пределах которого цели не разрешаются.
Обычно считают, что импульсный объем ограничен шириной луча ДНА по половинной мощности  и длинной
и длинной  (рис.3.27.), где
(рис.3.27.), где  - длительность импульса на выходе схемы оптимальной обработки.
- длительность импульса на выходе схемы оптимальной обработки.
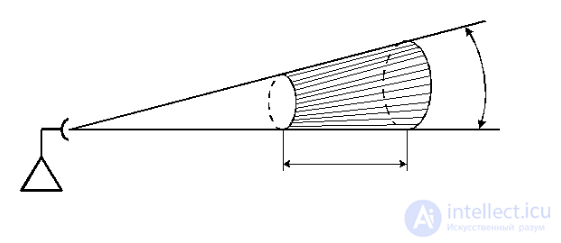
Рис.3.27. Импульсный объем РЛС
Чем шире спектр зондирующего импульса (меньше  ) и уже луч ДНА (меньше
) и уже луч ДНА (меньше  ), тем меньше импульсный объем и выше разрешающая способность РЛС.
), тем меньше импульсный объем и выше разрешающая способность РЛС.
Разрешение целей по скорости возможно при использовании когерентной пачки отраженных сигналов, так как она имеет дискретный спектр (подробней эта задача будет рассмотрена ниже). Разрешающая способность по скорости – это разрешающая способность по частоте , где
, где  - число импульсов в пачке,
- число импульсов в пачке,  - период следования импульсов.
- период следования импульсов.
Разрешающая способность по скорости (по частоте) тем выше, чем больше длительность пачки импульсов  .
.
Помехозащищенностью РЛС называется способность выполнения ею заданных функций в условиях воздействия помех.
Данная характеристика определяется скрытностью работы РЛС и ее помехоустойчивостью.
Под скрытностью РЛС понимают вероятность обнаружения ее работы и измерения основных параметров радиоимпульсов средствами радиотехнической разведки противника за определенное время.
Скрытность обеспечивается:
Количественной оценкой помехоустойчивости РЛС является отношение мощности сигнала к мощности помехи на входе оптимального фильтра, при котором обеспечиваются требуемые значения вероятности правильного обнаружения  при фиксированном значении вероятности ложной тревоги
при фиксированном значении вероятности ложной тревоги  , а также точности измерения координат. Это отношение, как известно из теории обнаружения, не зависит от формы сигнала (
, а также точности измерения координат. Это отношение, как известно из теории обнаружения, не зависит от формы сигнала ( ), а определяется энергией зондирующего сигнала при прочих равных условиях. Отсюда следует, что для повышения помехоустойчивости необходимо существенное увеличение энергии зондирующих сигналов. Однако это противоречит требованиям обеспечения скрытности РЛС. Противоречие может быть разрешено использованием сложномодулированных зондирующих импульсов с широким спектром. Эта мера может заставить противника излучать активную помеху в широкой полосе частот, что (при фиксированной мощности передатчика помех) обеспечит снижение спектральной плотности мощности помехи
), а определяется энергией зондирующего сигнала при прочих равных условиях. Отсюда следует, что для повышения помехоустойчивости необходимо существенное увеличение энергии зондирующих сигналов. Однако это противоречит требованиям обеспечения скрытности РЛС. Противоречие может быть разрешено использованием сложномодулированных зондирующих импульсов с широким спектром. Эта мера может заставить противника излучать активную помеху в широкой полосе частот, что (при фиксированной мощности передатчика помех) обеспечит снижение спектральной плотности мощности помехи  . (При воздействии помех
. (При воздействии помех  ).
).
Кроме того, для повышения помехоустойчивости РЛС используется:
Повышение помехозащищенности РЛС в условиях воздействия маскирующих пассивных помех (как преднамеренных, так и непреднамеренных) достигается двумя способами:
Уменьшение импульсного объема РЛС приводит к уменьшению среднего значения ЭПР пассивной помехи, а, следовательно, к уменьшению энергии отраженного от пассивной помехи сигнала. Влияние параметров зондирующего сигнала на величину импульсного объема РЛС рассматривалось выше. Разрешающая способность по скорости позволяет выделять полезный сигнал на фоне пассивной помехи за счет разности радиальных скоростей на основе использования эффекта Доплера. При учете влияния параметров зондирующих сигналов на разрешающую способность по скорости, речь должна идти о необходимости одновременного разрешения по дальности и скорости. Таким образом, к двумерной автокорреляционной функции сигнала должны быть предъявлены требования быть узкой и по оси времени ( ) и по оси частот (
) и по оси частот ( ), что является преодолением известного в теории радиолокации принципа неопределенности.
), что является преодолением известного в теории радиолокации принципа неопределенности.
Наиболее полно этому требованию удовлетворяют когерентные пачки сложных радиоимпульсов.
При технической реализации систем СДЦ возможны различные варианты построения когерентно-импульсных РЛС:
 );
);Применение в РЛС той или иной структуры зондирующего сигнала обусловлено требованиями к эффективности систем СДЦ. Зондирующие сигналы с истиной когерентностью позволяют обеспечить в системе СДЦ большие значения коэффициента подавления помехи (40 дБ и более). Псевдокогерентные зондирующие сигналы применяются в том случае, когда к системе СДЦ не предъявляются жесткие требования, а определяющим является простота технической реализации аппаратуры радиопередающего устройства РЛС.
Проведенный выше анализ показывает, что структуры и параметры зондирующих сигналов оказывают существенное влияние на тактико-технические характеристики РЛС, причем это влияние на различные характеристики неоднозначно.
Для повышения дальности действия РЛС, точности измерения координат и скорости необходимо увеличивать энергию принимаемого сигнала, для чего при фиксированной импульсной мощности требуется увеличивать его длительность и длительность пачки эхо-сигналов.
Для повышения разрешающей способности по дальности следует увеличивать ширину спектра радиоимпульса, а по скорости – его длительность. Одновременное разрешение по дальности и по скорости (по частоте Доплера) возможно на основе применения широкополосных (сложных) радиоимпульсов.
Для обеспечения помехозащищенности РЛС от пассивных помех на основе применения систем СДЦ необходимо использование когерентной последовательности радиоимпульсов.
Помехозащищенность РЛС от активных помех зависит от энергии принимаемых сигналов, для чего необходимо использовать широкополосные сигналы, а так же от возможности РЛС оперативно изменять такие параметры сигнала, как несущая частота и поляризация.
Сложной и неоднозначной является зависимость основных тактико-технических характеристик РЛС от длины волны (несущей частоты) зондирующих сигналов. С учетом влияния всех факторов, целесообразным оказывается применение метрового диапазона волн в РЛС дальнего обнаружения, а сантиметрового и прилегающей к нему части дециметрового диапазона волн – в РЛС обнаружения, наведения и целеуказания активным родам войск ВВС и ПВО и в РЛС обнаружения маловысотных целей.
Статью про зондирующие сигналы я написал специально для тебя. Если ты хотел бы внести свой вклад в развитие теории и практики, ты можешь написать коммент или статью отправив на мою почту в разделе контакты. Этим ты поможешь другим читателям, ведь ты хочешь это сделать? Надеюсь, что теперь ты понял что такое зондирующие сигналы, ошибки измерения дальности, ошибки измерения угловых координат и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Радиотехнические системы
 , Гц
, Гц



Комментарии