Лекция
Привет, Вы узнаете о том , что такое реабилитация, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое реабилитация, физическая реабилитация, микропроцессорные системы специального назначения, искусственные органы, имплантируемые биостимуляторы, биоуправляемые протезы конечностей , настоятельно рекомендую прочитать все из категории Электронная лечебная аппаратура.
реабилитация — это направление современной медицины, которая в своих разнообразных методах опирается прежде всего на личность пациента, активно пытаясь восстановить нарушенные болезнью функции человека, а также его социальные связи. Термин «реабилитация» происходит от лат. habilis — способность и rehabilis — восстановление способности.
Толчком для развития реабилитации как науки послужили Первая мировая и Вторая мировая войны. В связи с достижениями медицины, санитарии, гигиены значительно снизились заболеваемость и смертность от острых инфекционных заболеваний. В то же время ускорение научно-технического прогресса, быстрая индустриализация и урбанизация, загрязнение окружающей среды, увеличение стрессовых ситуаций привели к росту тяжелых неинфекционных заболеваний. Сегодня растет число пациентов с наследственной и врожденной патологией, с хроническими заболеваниями органов дыхания, пищеварения, мочеполовой системы, аллергическими заболеваниями, с травмами и отравлениями. Но, наряду с остальными категориями населения, инвалиды должны иметь физические, социальные и экономические возможности, позволяющие им, как минимум, вести полноценную в социально-экономическом и созидательную в умственном плане жизнь.
Помощь социально не полностью защищенным людям — показатель культуры и цивилизованности общества.
Цель реабилитации — эффективное и раннее возвращение больных и инвалидов к бытовым и трудовым процессам, в общество; восстановление личностных свойств человека. Всемирная организация здравоохранения (ВОЗ) дает очень близкое к этому определение реабилитации: «Реабилитация представляет собой совокупность мероприятий, призванных обеспечить лицам с нарушениями функций в результате болезней, травм и врожденных дефектов приспособление к новым условиям жизни в обществе, в котором они живут».
По мнению ВОЗ, реабилитация является процессом, направленным на всестороннюю помощь больным и инвалидам для достижения ими максимально возможной при данном заболевании физической, психической, профессиональной, социальной и экономической полноценности.
Таким образом, реабилитацию следует рассматривать как сложную, социально-медицинскую проблему, которую можно подразделить на несколько видов, или аспектов: медицинскую, физическую, психологическую, профессиональную (трудовую) и социально-экономическую.
Поэтому в области общих основ реабилитации студент должен:
Первое и основное направление реабилитации (медицинской и физической) — восстановление здоровья больного посредством комплексного использования различных средств, направленных на максимальное восстановление нарушенных физиологических функций организма, а в случае невозможности достижения этого — развитие компенсаторных и заместительных приспособлений (функций).
Психологический аспект реабилитации направлен на коррекцию психического состояния пациента, а также формирование его отношения к лечению, врачебным рекомендациям, выполнению реабилитационных мероприятий. Необходимо создать условия для психологической адаптации больного к изменившейся вследствие болезни жизненной ситуации.
Профессиональный аспект реабилитации затрагивает вопросы трудоустройства, профессионального обучения и переобучения, определения трудоспособности больных.
Социально-экономическая реабилитация состоит в том, чтобы вернуть пострадавшему экономическую независимость и социальную полноценность. Эти задачи решаются не только медицинскими учреждениями, но и органами социального обеспечения.
Таким образом, реабилитация — это многогранный процесс восстановления здоровья человека и реинтеграции его в трудовую и социальную жизнь. Естественно, что виды реабилитации следует рассматривать в единстве и взаимосвязи. Три вида реабилитации (медицинская, трудовая и социальная) соответствуют следующим трем классам последствий болезней: 1) медико-биологические последствия болезней, заключающиеся в отклонениях от нормального морфофункционального статуса; 2) снижение трудоспособности или работоспособности в широком смысле слова; 3) социальная дезадаптация, т. е. нарушение связей с семьей и обществом. Отсюда следует, что выздоровление больного после перенесенного заболевания и его реабилитация — совсем не одно и то же, так как, помимо восстановления здоровья пациента, необходимо восстановить еще и его работоспособность (трудоспособность), социальный статус, т. е. вернуть человека к полноценной жизни в семье, обществе, коллективе.
Особенностью современной патологии является учащение перехода острых форм заболеваний в рецидивирующие и хронические, а также нарастание первично хронической патологии внутренних органов. Эти заболевания являются причинами снижения (ограничения) жизненных и социальных функций. В связи с этим организация своевременной диагностики и проведения восстановительных мероприятий становится одной из первоочередных задач медицины.
+Проблема реабилитации больных и инвалидов привлекает все большее внимание во всех странах мира. Для лучшей координации работы специалистов, работающих в области реабилитации, ВОЗ предложила «Руководство по классификации последствий болезни и причин инвалидности», где рассматриваются и классифицируются не болезни как нозологические формы, а последствия перенесенных заболеваний и травм.
Международная номенклатура нарушений, ограничений жизнедеятельности и социальной недостаточности (Руководство по классификации болезней и причин инвалидности) предлагает следующую единую концепцию последствий болезни.
Основными этапами в развитии болезни являются:
1. Нарушение. Возникновение изменений в организме является реакцией организма на различные причинные обстоятельства — «этиологию». «Этиология» дает начало изменениям в структуре или функциях организма, т. е. «патологии». Проявления патологических изменений определяются как «симптомы и признаки» и выглядят так:
этиология —> патология —> проявления.
Человек начинает понимать, что в его организме что-то происходит, т. е. патологическое состояние проявляется конкретно, материализуется. В большинстве случаев сам человек осознает проявление болезни, которое можно определить как «клиническое состояние».
Таким образом, клиническое состояние включает в себя и патологические изменения, и проявления болезни, и реакцию пациента на свое состояние. Длительно текущая болезнь предвещает развитие нарушений, ненормальную структуру тела, изменение внешнего вида, а также расстройства функционирования органов и систем организма. Нарушение представляет собой расстройство на органном уровне.
2. Ограничение жизнедеятельности. Деятельность или поведение человека могут измениться в результате появления нарушений. Возникает дефицит физических и социальных действий, т. е. происходит ограничение жизнедеятельности. С точки зрения функциональной деятельности и активности индивида снижение жизненных функций представляет собой расстройство на уровне человека (личности).
3. Социальная недостаточность. Само знание о болезни или изменившееся поведение индивида, или ограничения его деятельности, вытекающие из этого знания, могут поставить конкретного человека в невыгодное положение по отношению к окружающим. Об этом говорит сайт https://intellect.icu . Таким образом, болезнь приобретает социальный характер. Этот уровень развития болезни отражает реакцию общества на состояние индивида, она проявляется во взаимоотношениях индивида с обществом, которые могут включать и такой специфический инструмент, как законодательство. Это проявление отражает социальную недостаточность (иными словами — социальную дезадаптацию). Явная связь со значением, которое придает деятельности индивида или его состоянию общество, делает социальную недостаточность самым проблематичным уровнем развития болезни среди всех ее последствий.
Эта последовательность в ряде случаев может быть неполной, или возможен ее разрыв на любом этапе.
Более наглядно взаимоотношения между отдельными элементами последствий болезни иллюстрирует схема 1, из которой видно, что все они, как правило, имеют место у одного и того же индивида одновременно.
Для организации помощи пациенту в восстановлении здоровья необходимы:
Главной задачей медицинской реабилитации является полноценное восстановление функциональных возможностей различных систем организма и опорно-двигательного аппарата (ОДА), а также развитие компенсаторных приспособлений к условиям повседневной жизни и труду.
К частным задачам реабилитации относятся: 4 восстановление бытовых возможностей больного, т. е. способности к передвижению, самообслуживанию и выполнению несложной домашней работы; «восстановление трудоспособности, т. е. утраченных инвалидом профессиональных навыков, путем использования и развития функциональных возможностей двигательного аппарата; » предупреждение развития патологических процессов, приводящих к временной или стойкой утрате трудоспособности, т. е. осуществление мер вторичной профилактики.
+Цель реабилитации — наиболее полное восстановление утраченных возможностей организма, но если это недостижимо, ставится задача частичного восстановления либо компенсации нарушенной или утраченной функции, и в любом случае — замедления прогрессирования заболевания. Для их достижения используется комплекс лечебно-восстановительных средств, среди которых наибольшим реабилитирующим эффектом обладают физические упражнения, природные факторы (как естественные, так и переформированные), различные виды массажа, занятия на тренажерах, а также ортопедические приспособления, трудотерапия, психотерапия и аутотренинг. Даже из этого перечня видно, что ведущая роль в реабилитации принадлежит методам физического воздействия, и чем дальше от этапа к этапу она продвигается, тем большее значение они имеют, со временем составив ветвь, или вид, под названием « физическая реабилитация ».
Физическая реабилитация — составная часть медицинской, социальной и профессиональной реабилитации, система мероприятий по восстановлению или компенсации физических возможностей и интеллектуальных способностей, повышению функционального состояния организма, улучшению физических качеств, психоэмоциональной устойчивости и адаптационных резервов организма человека средствами и методами физической культуры, элементов спорта и спортивной подготовки, массажа, физиотерапии и природных факторов.
Физическую реабилитацию следует рассматривать как лечебно-педагогический и воспитательный процесс или, правильнее сказать, образовательный процесс. Основным средством физической реабилитации являются физические упражнения и элементы спорта, а применение их — всегда педагогический, образовательный процесс. Качество его зависит от того, насколько методист овладел педагогическим мастерством и знаниями.
ПРИНЦИПЫ МЕДИЦИПСКОЙ И ФИЗИЧЕСКОЙ РЕАБИЛИТАЦИИ
Программа медицинской реабилитации пациента включает в себя:
Одним из способов создания более совершенных протезов и систем управления ими является использование микропроцессоров. Основная трудность при этом состоит в получении надежного сигнала от различных участков тела для управления протезом (и, следовательно, для его надежной работы).
В настоящее время ведутся разработки протеза руки на основе микропроцессора (Калифорнийский университет), протеза коленного сустава, создается система управления искусственным протезом верхних конечностей после надлоктевой ампутации (Колорадский университет), а также система управления протезом, работающая по уже заложенным программам на базе микропроцессора (Висконсинский университет).
Система управления протезом нижней конечности схематически изображена на рис. 13. В первоначальном варианте системы была использована мини-ЭВМ (Computer Automation Alpha), которая впоследствии была заменена микропроцессором F8. Компьютер через АЦ-преобразователь считывает мгновенное значение желаемого угла сгиба колена (odes), указываемое на шкале электрогониометра (К), и мгновенное значение реального угла сгиба протеза (θPROS), воспринимаемого потенциометром (J), работающим по принципу обратной связи, который располагается по оси протеза сустава. По программе управления, блок-схема которой изображена на рис. 2, компьютер мгновенно производит вычисления ошибок положения протеза и скорости вращения. Кроме того, определяются значения изменения положения клапана (H), необходимые для достижения желаемого сгиба сустава. Сигналы с микропроцессора проходят через ЦА-преобразователь (С), интерфейс (D) и поступают на контроллер соленоида (Е), а затем на соленоид (F). Весь процесс повторяется приблизительно 930 раз в 1 с, и, таким образом, протез непосредственно и быстро «реагирует» на желаемый сигнал управления.
Система, разработанная в Колорадском университете, включает микропроцессор Intel 8080, интерфейс для связи с объектом через порты ввода/вывода и 4 Кбайта памяти на полупроводниках (рис. 3). Для увеличения скорости операций умножения и деления (которые занимают значительный процент времени работы микропроцессора) производится его. сопряжение с блоком умножения, который основан на множительных модулях Fairchild 934X2 бита. Время умножения составляет 350 не, а не 1 мс, как у микропроцессора.
Работа системы основана на получении электромиографических сигналов. С помощью. 12-разрядной системы приема данных считываются ЭМГ-сигналы с частотой отсчета 5000 Гц, и данные в цифровой форме поступают в микропроцессор. Алгоритм управления создан на базе метода идентификации временных последовательностей для дискриминации параметров.
Разработка протезов верхних конечностей в Калифорнийском университете (Лос-Анджелес) вначале велась на базе микрокомпьютера Teledyne TDY-52, который впоследствии был заменен микро-ЭВМ RCA COSMAC. Микрокомпьютер производит расшифровку паттернов миографических сигналов, поступающих с девяти электродов. С помощью карт алгоритмов распознавания образов сигналов, снимаемых с электродов, производится управление координированными движениями руки при любой возможной комбинации включений моторов. Две подсистемы, компьютерная и распознавания образов, образуют единую систему управления, организация которой подобна организации мозга человека.
Микро-ЭВМ работает с микропроцессором COSMAC и использует для хранения программ 1 Кбайт ОЗУ. Аналоговый мультиплексор (CD 4067) производит селекцию ввода сигналов с электродов перед их подачей на АЦ-преобразователь. Микропроцессор управляет тремя моторами — локтевым, запястным и кистевым — в различных комбинациях.
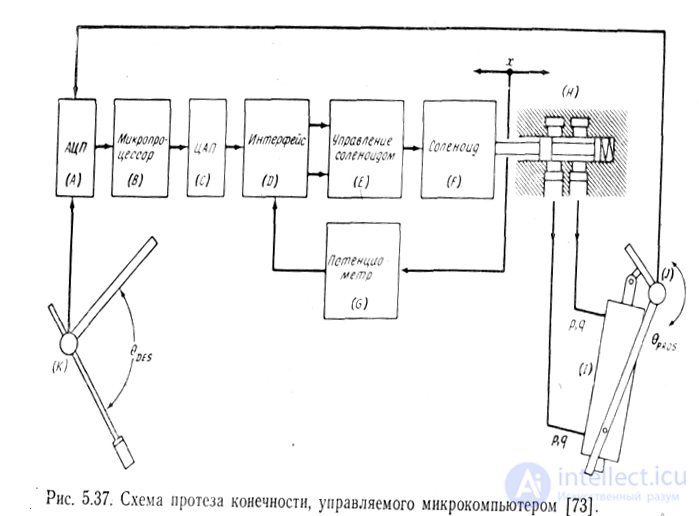
Рис. 1. Схема протеза конечности управляемого микрокомпьютером
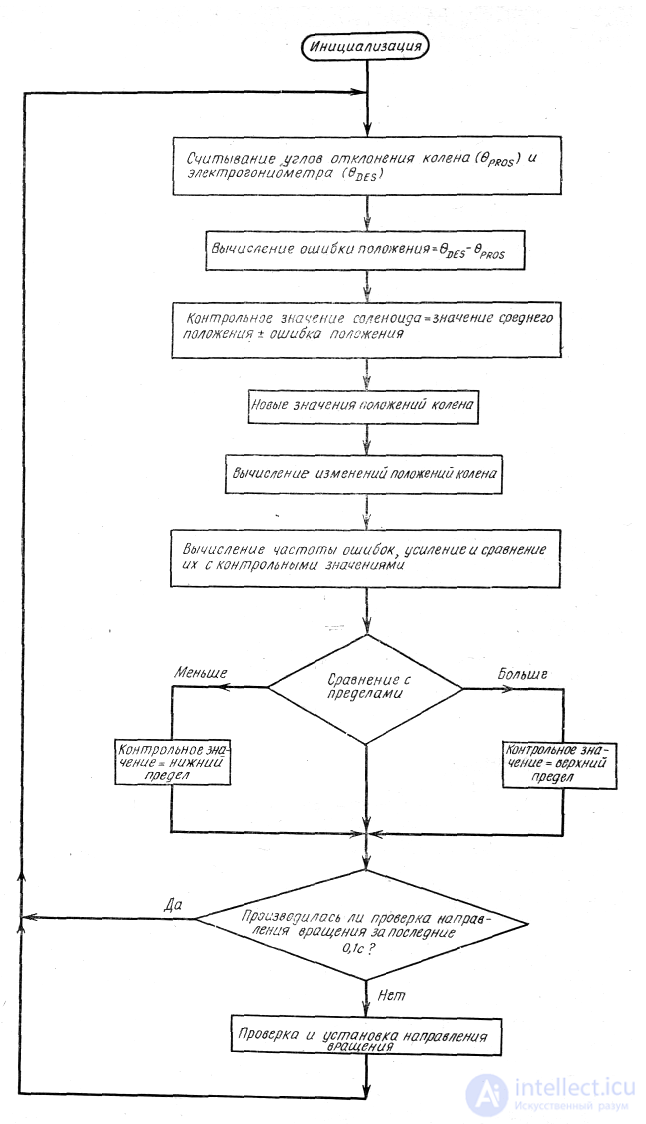
Рис. 2. Блок-схема алгоритма управления протезом конечности.
Рис 3 Блок-схема протеза конечности, разработанного в Колорадском университете.
Допустим, что необходимо создать протез предплечья, управляемый микропроцессором и позволяющий обеспечить следующие три степени свободы лучезапястного сустава: управление сжиманием-расжиманием кисти, управление движениями руки вверх-вниз, управление движениями руки в разные стороны. Проведение соответствующих экспериментов позволило установить, что для достижения желаемой степени управления регистрацией электромиограммы (ЭМГ) требуется восемь электродов, расположенных в различных местах руки. Предположим, что сигналы, поступающие с каждого электрода, преобразуются с помощью аналоговой интерфейсной схемы в серию импульсов. Тогда постоянный поток импульсов будет идти с того электрода, на котором уровень ЭМГ превышает пороговое значение. Попробуем спроектировать эту систему, используя микрокомпьютер COSMAC.
Наиболее эффективный способ создания такого протеза будет заключаться в использовании четырех флажковых линий для обнаружения восьми сигналов с электродов. Чтобы эти восемь сигналов управления соответствовали четырем линиям, необходимо применить мультиплексор. Командами с линии Q поочередно включается один из четырех электродов. Три шаговых двигателя, соединенные с тремя линиями вывода N0, N1 и N2, дадут нам три степени свободы управления. Длительность выходного импульса (8 мкс) может быть увеличена до величины, необходимой для работы шагового мотора, с помощью ждущего мультивибратора.
Схема такой системы представлена на рис. 4, а блок-схема алгоритма ее работы изображена на рис. 5.
Далее требуется установить время, необходимое для осуществления одного цикла работы. Например, каждый канал ввода (при наличии ЭМГ) принимает импульсы, генерируемые с частотой 10 Гц. Максимальная частота импульсов для шаговых моторов составляет 50 Гц. Частота тактовых импульсов центрального процессора равна 2 МГц.
Произведем самые простые вычисления: при восьми активных каналах число флажков, которое необходимо проверить, равно 8٭10 в 1 с, или 80 в 1 с (для выбора мультиплексора необходимо наличие двух команд: SEQ и REQ). Обычная последовательность проверки флажков будет представляться в виде Bl Addr, т. е. имеется короткое разветвление на Addr, если флажок EF=1 (двум машинным циклам). За этим должно следовать (или предшествовать этому) условие BN1 Addr, т. е. короткое разветвление, если флажок EF1=0 (двум машинным циклам). Следовательно, минимальное время проверки всех флажков будет равно

После проверки всех флажков (за 272 мкс) можно логически определить, какой мотор необходимо включить и при какой частоте. Допустим, что выполняются 100 команд. Тогда требуемое для этого время будет равно 100X8X2 мкс=1600 мкс. Следовательно, общее время между двумя командами вывода составит 1600+272 = 1872 мкм. Поскольку, однако, команды должны подаваться с частотой 3X50= 150в 1 с, необходимое время составит 7 мс. Этого времени вполне достаточно для выполнения требуемого цикла управления протезом. Фактически имеющаяся логика позволяет производить выполнение приблизительно около 400 команд.
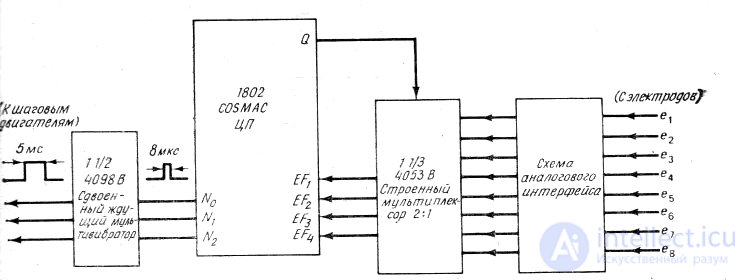
Рис. 4. Управление протезом руки с помощью микропроцессора.
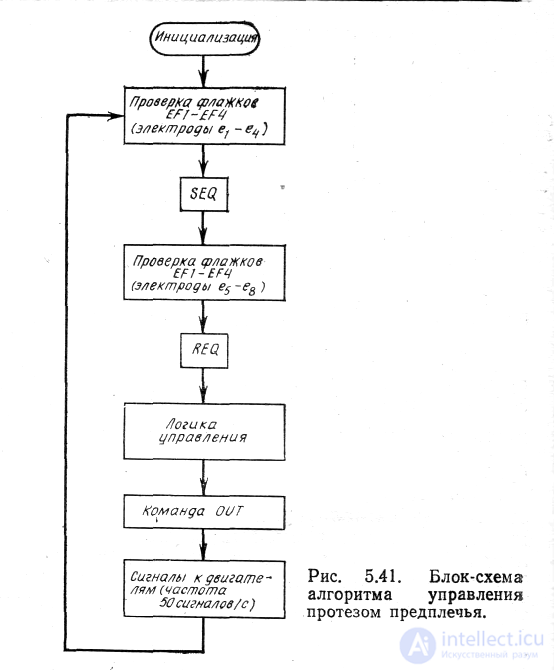
Рис. 5.. Блок-схема алгоритма управления протезом предплечья.
В девяноста случаях из ста для коррекции позвоночника больным сколиозом достаточно носить корсет. В остальных же случаях необходимо радикальное оперативное вмешательство. Один из возможных методов такой коррекции предусматривает предварительное удаление тканей, окружающих пораженный позвонок, и закрепление на этом позвоночнике титановой проволоки (натягивая проволоку, хирург зажимает пораженный позвонок между соседними позвонками). Это приводит к выпрямлению позвоночника и в то же время к его частичной неподвижности. Контроль за степенью натяжения проволоки после хирургического вмешательства осуществляется с помощью микропроцессорной системы, созданной в Массачусет-ском технологическом институте.
Имплантированный тензодатчик изменяет свое сопротивление прямо пропорционально степени натяжения титановой проволоки. Второй тензодатчик используется для компенсации влияний колебания температуры и является эталоном,по которому можно вычислить реальное натяжение. В имплантиреванном тензодатчике нет собственного источника питания. Величина сопротивления датчика определяется по изменению нагрузочного импеданса наружного излучателя электромагнитного поля (рис. 6). Этот источник поля имеет индуктивную связь с имплантированным выпрямителем, питающим постоянным током релаксационный генератор. Сопротивление тензодатчика входит в колебательный контур и определяет частоту генератора. Поскольку мощность, отбираемая у источника электромагнитного поля, изменяется при изменении частоты генератора, сопротивление тензодатчика можно определить, управляя генератором. Электромагнитное поле, с помощью которого производится включение геркона, служит для выбора одной из двух различных схем тензодатчиков. Посредством детектора и процессора осуществляется преобразование в цифровую форму периода колебаний мощности электромагнитного поля. Эти изменения вызваны колебаниями нагрузочного импеданса имплантанта, причем величина импеданса прямо пропорциональна сопротивлению тензодатчика.
В микропроцессоре Motorola MC6800 имеется 512 байт ПЗУ и 128 байт ОЗУ. Значения натяжения проволоки воспроизводятся на 4-разрядном светодиодном индикаторе. Значения натяжения в аналоговой форме могут быть записаны на магнитофон.
Устройство может работать в одном из трех режимов. В эталонном, режиме производится проверка эталонного тензодатчика; в активном режиме — активного тензодатчика, причем режимы могут устанавливаться вручную. Процессор может быть также переведен и в автоматический режим работы, в котором производится проверка как эталонного, так и активного датчиков. С помощью аппаратных средств периодически генерируются синхронизирующие импульсы, используемые микропроцессором для определения начала и конца измерения. Микрокомпьютер вычисляет число тактовых импульсов за установленное число периодов для определения среднего интервала времени, а затем вычисляет и воспроизводит значения натяжения.
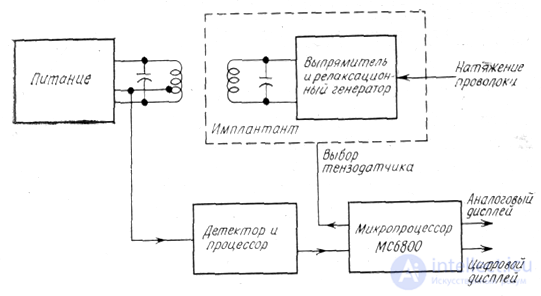
Рис. 6. Имплантируемая биотелеметрическая система измерения натяжения титановой проволоки, прикрепленной к позвонку.
Сигналы с активного и эталонного тензодатчиков последовательно модулируют период колебаний релаксационного генератора; соотношение каждых двух последовательных периодов прямо пропорционально натяжению проволоки.
. С помощью программируемого тренажера проводится наблюдение за скоростью выполнения упражнений и осуществляется обратная связь с испытуемым для указания ему желаемого уровня нагрузки. Тренажер представляет собой велоэргометр (стационарное сиденье с педалями, как у велосипеда) с нагрузкой на педали, регулируемой электронным устройством торможения. В 4-разрядном микрокомпьютере Rockwell PPS-4/2 используются центральный процессор, кристалл для ввода/вывода, 4 Кбайт ПЗУ и 128 байт ОЗУ. Питание электронных схем осуществляется от батареи, которую можно перезаряжать. Вращением педалей обеспечивается работа генератора переменного тока, с помощью которого производится подзарядка батареи и включение электронных схем нагрузки на педали. Через клавиатуру с одновременным отображением информации на дисплее пациент вводит соответствующие о себе данные (пол, возраст или вес). Упражнение начинается с тренировочного режима (для начального ознакомления пациента с процедурой), и через несколько минут по команде с микропроцессора нагрузка увеличивается. Микропроцессор также позволяет наблюдать за частотой сердечных сокращений, информация о которой поступает с твердотельного датчика, прикрепленного к мочке уха, или с трех грудных электродов. Загорание одного из светодиодных индикаторов указывает конец начального этапа процедуры, правильна ли была дана нагрузка или произошла перегрузка. Испытуемый в любое время может дать необходимую команду на компьютер, и тогда на 4-разрядном светодиодном индикаторе возникнут показатели затраченных калорий, времени с момента начала упражнения, числа вращений, частоты сердечных сокращений в данный момент, желаемой частоты сердечных сокращений, рабочей нагрузки или первоначально введенных параметров. В течение последних трех минут производится сравнение показателей испытуемого со средними показателями группы того же пола, веса и возраста. Окончательный результат оценивается по шкале показателя общего физического состояния пациента.
В Вандербилтском университете была разработана микрокомпьютерная система, с помощью которой можно разрабатывать, выбирать и дозировать психомоторные тесты и наблюдать за их выполнением. При этом производится оценка объема остаточного азота крови, так как у пациентов с высоким содержанием остаточного азота наблюдается худшая реакция на тест, чем у пациентов с нормальным содержанием азота. Микрокомпьютер выполняет четыре типа тестов: на время реакции (два вида), на внимание и на кратковременную память.
В системе применяется микропроцессор 8080 Intelligent -Systems Corp. Терминал модели 8001 используется для хранения программы и для отображения различных образов на экране. Для ответа испытуемый должен нажать на кнопку. Кроме терминала в системе применяется только одно периферическое устройство — ключ.
Микропроцессор предлагает следующие тесты. В случайной последовательности надо выбрать один из четырех возможных символов. Если выбранный и предъявленный на дисплее символ совпадает с заданным, то пациент нажимает на ключ. Время реакции измеряется микрокомпьютером. Для оценки внимания (способности к сканированию) учитывается, сколько раз испытуемый распознал данный символ при его трехкратном предъявлении в ряду из 16 символов. Тест на кратковременную память заключается в том, что необходимо определить, предъявлялся ли показываемый на дисплее символ раньше. С помощью программы генерируются случайные числа для каждого теста, воспроизводится индивидуальный тест и вычисляется среднестатистическое значение времени реакций для последующей оценки. Загрузка программы производится непосредственно с другого компьютера.
С возрастом часто ослабляется или теряется кратковременная память. В связи с этим больные, которым необходимо ограничивать диету и самим принимать лекарства, не могут обходиться без посторонней помощи. Для создания напоминающего устройства с высвечиванием информации используется микрокомпьютер 6502 с ОЗУ в 4 Кбайт. Больной, нажав кнопку, видит на экране своего телевизора распорядок дня и время выполнения необходимых процедур, например: инъекция инсулина, меню на завтрак, четыре капсулы лекарства, измерение и запись артериального давления, визит медсестры, визит дантиста, прием пищи с передвижного столика. Если пациент забудет выполнить процедуру в указанное время или отменить ее, будет звучать сигнал тревоги. Новая информация периодически вводится лицом, присматривающим за больным.
Данная статья про реабилитация подтверждают значимость применения современных методик для изучения данных проблем. Надеюсь, что теперь ты понял что такое реабилитация, физическая реабилитация, микропроцессорные системы специального назначения, искусственные органы, имплантируемые биостимуляторы, биоуправляемые протезы конечностей и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Электронная лечебная аппаратура
Ответы на вопросы для самопроверки пишите в комментариях, мы проверим, или же задавайте свой вопрос по данной теме.

Комментарии