Привет, Вы узнаете о том , что такое виды архитектур нейронных сетей, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое
виды архитектур нейронных сетей , настоятельно рекомендую прочитать все из категории Computational Neuroscience (вычислительная нейронаука) Теория и приложения искусственных нейронных сетей.
За всеми архитектурами нейронных сетей, которые то и дело возникают последнее время, уследить непросто. Даже понимание всех аббревиатур, которыми бросаются профессионалы, поначалу может показаться невыполнимой задачей.
Поэтому я решил составить шпаргалку по таким архитектурам. Большинство из них — нейронные сети, но некоторые — звери иной породы. Хотя все эти архитектуры подаются как новейшие и уникальные, когда я изобразил их структуру, внутренние связи стали намного понятнее.
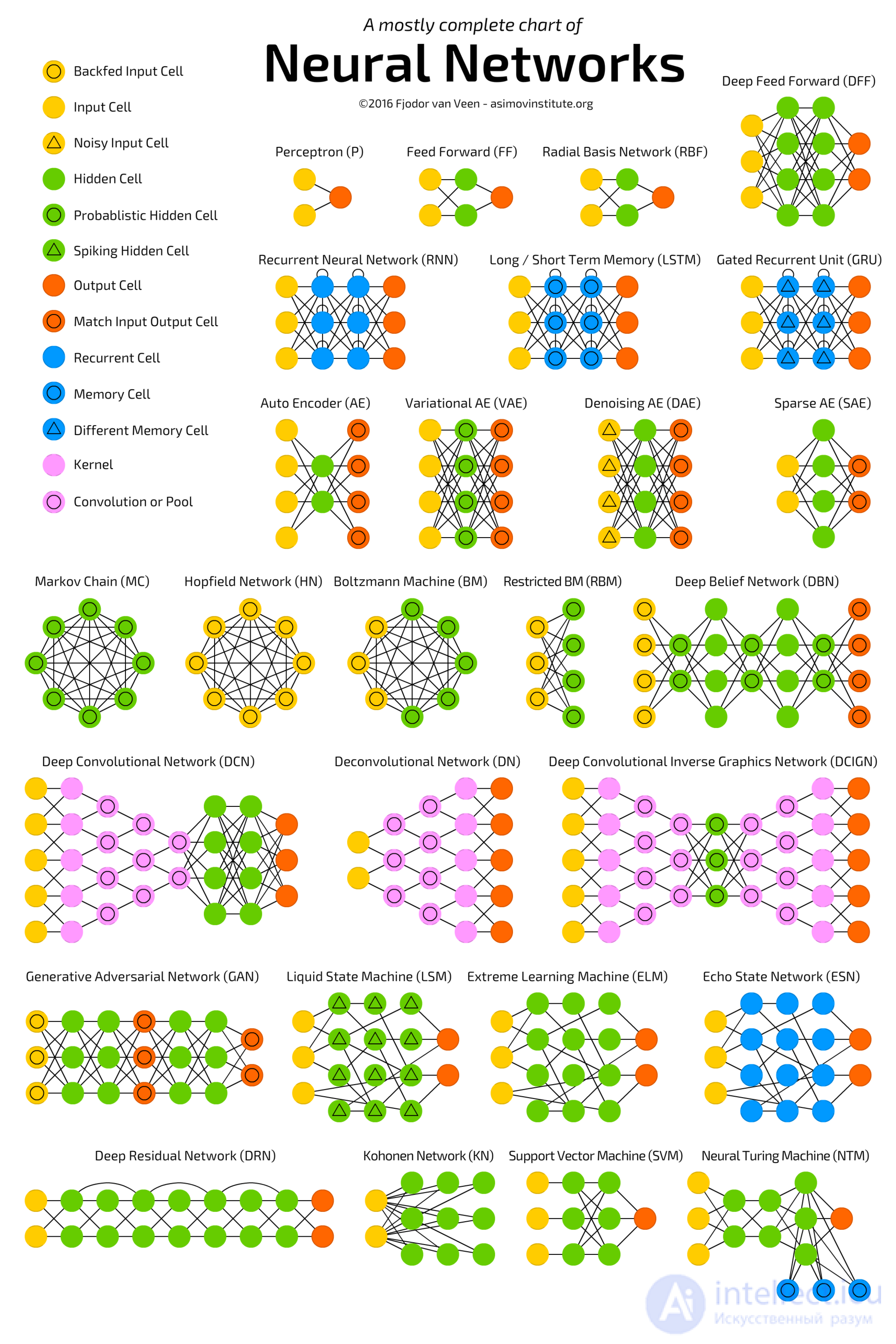
У изображения нейросетей в виде графов есть один недостаток: граф не покажет, как сеть работает. Например, вариационный автоэнкодер (variational autoencoders, VAE) выглядит в точности как простой автоэнкодер (AE), в то время как процесс обучения у этих нейросетей совершенно разный. Сценарии использования различаются еще сильнее: в VAE на вход подается шум, из которого они получают новый вектор, в то время как AE просто находят для входных данных ближайший соответствующий вектор из тех, что они “помнят”. Добавлю еще, что этот обзор не имеет цели объяснить работу каждой из топологий изнутри (но это будет темой одной из следующих статей).
Следует отметить, что не все (хотя и большинство) из используемых здесь сокращений общеприняты. Под RNN иногда понимают рекурсивные нейронные сети (recursive neural networks), но обычно эта аббревиатура означает рекуррентную нейронную сеть (recurrent neural network). Но и это еще не все: во многих источниках вы встретите RNN как обозначение для любой рекуррентной архитектуры, включая LSTM, GRU и даже двунапраленные варианты. Иногда похожая путаница происходит с AE: VAE, DAE и им подобные могут называть просто AE. Многие сокращения содержат разное количество N в конце: можно сказать “сверточная нейронная сеть” — CNN (Convolutional Neural Network), а можно и просто “сверточная сеть” — CN.
Составить полный список топологий практически невозможно, так как новые появляются постоянно. Даже если специально искать публикации, найти их может быть сложно, а некоторые можно просто упустить из виду. Поэтому, хотя этот список поможет вам создать представление о мире искусственного интеллекта, пожалуйста, не считайте его исчерпывающим, особенно, если читаете статью спустя долгое время после ее появления.
Для каждой из архитектур, изображенной на схеме, я привел очень короткое описание. Некоторые из них будут полезны, если вы хорошо знакомы с несколькими архитектурами, но не знакомы конкретно с этой.
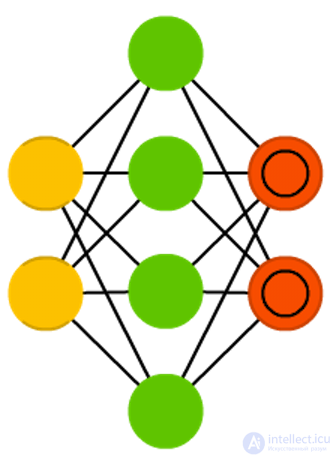
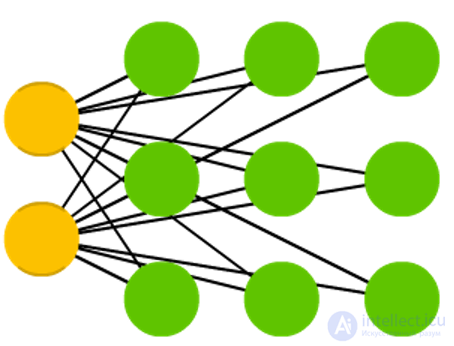
 Сети прямого распространения (Feed forward neural networks, FF or FFNN) и перцептроны (perceptrons, P)
Сети прямого распространения (Feed forward neural networks, FF or FFNN) и перцептроны (perceptrons, P) очень просты — они передают информацию от входа к выходу. Считается, что у нейронных сетей есть слои, каждый из которых состоит из входных, скрытых или выходных нейронов. Нейроны одного слоя между собой не связаны, при этом каждый нейрон этого слоя связан с каждым нейроном соседнего слоя. Простейшая мало-мальски рабочая сеть состоит из двух входных и одного выходного нейрона и может моделировать логический вентиль — базовый элемент цифровой схемы, выполняющий элементарную логическую операцию. FFNN обычно обучают методом обратного распространения ошибки, подавая модели на вход пары входных и ожидаемых выходных данных. Под ошибкой обычно понимаются различные степени отклонения выходных данных от исходных (например, среднеквадратичное отклонение или сумма модулей разностей). При условии, что сеть обладает достаточным количеством скрытых нейронов, теоретически она всегда сможет установить связь между входными и выходными данными. На практике использование сетей прямого распространения ограничено, и чаще они используются совместно с другими сетями.
Rosenblatt, Frank. “The perceptron: a probabilistic model for information storage and organization in the brain.” Psychological review 65.6 (1958): 386.
Original Paper PDF
 Сети радиально-базисных функций (radial basis function, RBF)
Сети радиально-базисных функций (radial basis function, RBF) — это FFNN с радиально-базисной функцией в качестве функции активации. Больше здесь нечего добавить. Мы не хотим сказать, что она не используется, но большинство FFNN с другими функциями активации обычно не выделяют в отдельные группы.
Broomhead, David S., and David Lowe. Radial basis functions, multi-variable functional interpolation and adaptive networks. No. RSRE-MEMO-4148. ROYAL SIGNALS AND RADAR ESTABLISHMENT MALVERN (UNITED KINGDOM), 1988.
Original Paper PDF
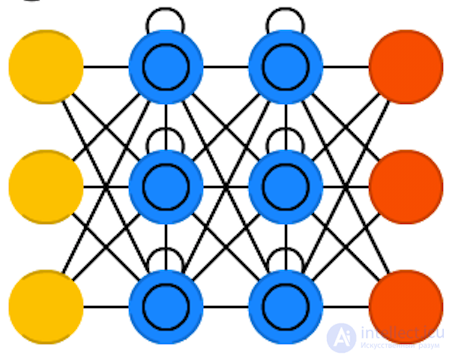
 Нейронная сеть Хопфилда
Нейронная сеть Хопфилда — полносвязная сеть (каждый нейрон соединен с каждым), где каждый нейрон выступает во всех трех ипостасях. Каждый нейрон служит входным до обучения, скрытым во время него и выходным после. Матрица весов подбирается таким образом, чтобы все «запомненные» вектора являлись бы для нее собственными. Однажды обученная одному или нескольким образам система будет сходиться к одному из известных ей образов, потому что только одно из этих состояний является стационарным. Отметим, что это не обязательно соответствует желаемому состоянию (к сожалению, у нас не волшебный черный ящик). Система стабилизируется только частично из-за того, что общая “энергия” или “температура” сети во время обучения постепенно понижается. Каждый нейрон обладает порогом активации, соизмеримым с этой температурой, и если сумма входных данных превысит этот порог, нейрон может переходить в одно из двух состояний (обычно -1 или 1, иногда 0 или 1). Узлы сети могут обновляться параллельно, но чаще всего это происходит последовательно. В последнем случае генерируется случайная последовательность, которая определяет порядок, в котором нейроны будут обновлять свое состояние. Когда каждый из нейронов обновился и их состояние больше не изменяется, сеть приходит в стационарное состояние. Такие сети часто называют ассоциативной памятью, так как они сходятся с состоянию, наиболее близкому к заданному: как человек, видя половину картинки, может дорисовать недостающую половину, так и нейронная сеть, получая на входе наполовину зашумленную картинку, достраивает ее до целой.
Hopfield, John J. “Neural networks and physical systems with emergent collective computational abilities.” Proceedings of the national academy of sciences 79.8 (1982): 2554-2558.
Original Paper PDF
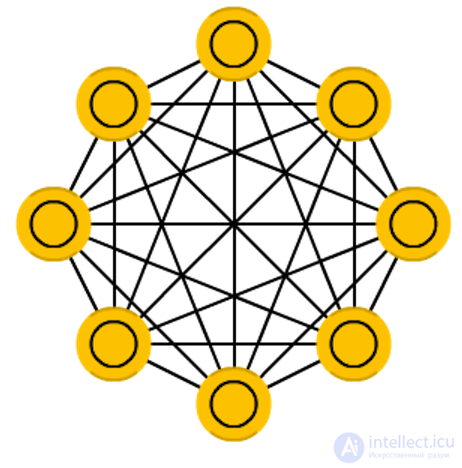
 Цепи Маркова (Markov Chains, MC или discrete time Markov Chain, DTMC)
Цепи Маркова (Markov Chains, MC или discrete time Markov Chain, DTMC) — своего рода предшественники машин Больцмана (BM) и сетей Хопфилда (HN). В цепях Маркова мы задаем вероятности перехода из текущего состояния в соседние. Кроме того, это цепи не имеют памяти: последующее состояние зависит только от текущего и не зависит от всех прошлых состояний. Хотя цепь Маркова нельзя назвать нейронной сетью, она близка к ним и формирует теоретическую основу для BM и HN. Цепи Маркова также не всегда являются полносвязными.
Hayes, Brian. “First links in the Markov chain.” American Scientist 101.2 (2013): 252.
Original Paper PDF
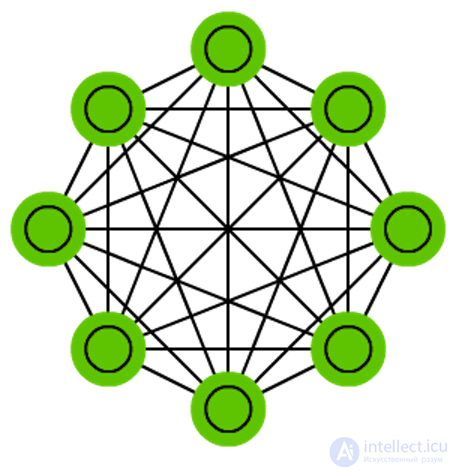
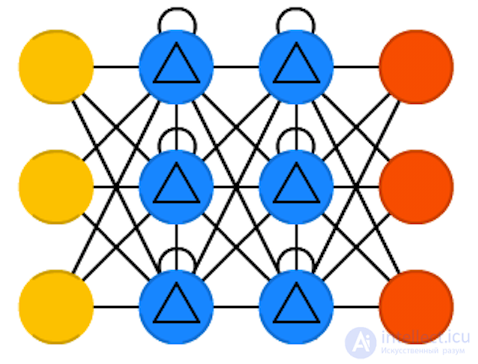
 Машины Больцмана (Boltzmann machines, BM)
Машины Больцмана (Boltzmann machines, BM) во многом похожи на сети Хопфилда, но в них некоторые нейроны помечены как входные, а некоторые остаются скрытыми. Входные нейроны становятся выходными, когда все нейроны в сети обновляют свои состояния. Сначала весовые коэффициенты присваиваются случайным образом, затем происходит обучение методом обратного распространения, или в последнее время все чаще с помощью алгоритма contrastive divergence (когда градиент вычисляется при помощи марковской цепи). BM — стохастическая нейронная сеть, так как в обучении задействована цепь Маркова. Процесс обучения и работы здесь почти такой же, как в сети Хопфилда: нейронам присваивают определенные начальные состояния, а затем цепь начинает свободно функционировать. В процессе работы нейроны могут принимать любое состояние, и мы постоянно перемещаемся между входными и скрытыми нейронами. Активация регулируется значением общей температуры, при понижении которой сокращается и энергия нейронов. Сокращение энергии вызывает стабилизацию нейронов. Таким образом, если температура задана верно, система достигает равновесия.
Hinton, Geoffrey E., and Terrence J. Sejnowski. “Learning and releaming in Boltzmann machines.” Parallel distributed processing: Explorations in the microstructure of cognition 1 (1986): 282-317.
Original Paper PDF
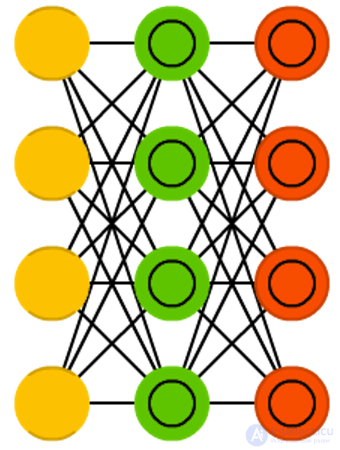
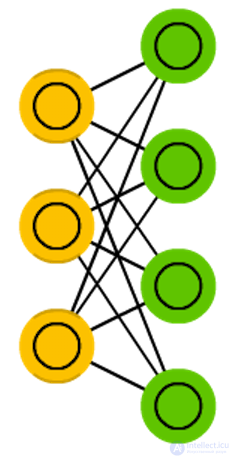 Ограниченная машина Больцмана (Restricted Boltzmann machine, RBM)
Ограниченная машина Больцмана (Restricted Boltzmann machine, RBM), как ни удивительно, очень похожа на обычную машину Больцмана. Основное отличие RBM от BM в том, что они ограничены, и следовательно, более удобны в использовании. В них каждый нейрон не связан с каждым, а только каждая группа нейронов соединена с другими группами. Входные нейроны не связаны между собой, нет соединений и между скрытыми нейронами. RBM можно обучать так же, как и FFPN, за небольшим отличием: вместо передачи данных вперед и последующего обратного распространения ошибки, данные передаются вперед и назад (к первому слою), а затем применяется прямое и обратное распространение (forward-and-back propagation).
Smolensky, Paul. Information processing in dynamical systems: Foundations of harmony theory. Об этом говорит сайт https://intellect.icu . No. CU-CS-321-86. COLORADO UNIV AT BOULDER DEPT OF COMPUTER SCIENCE, 1986.
Original Paper PDF
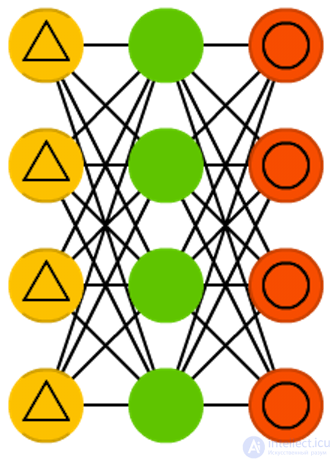
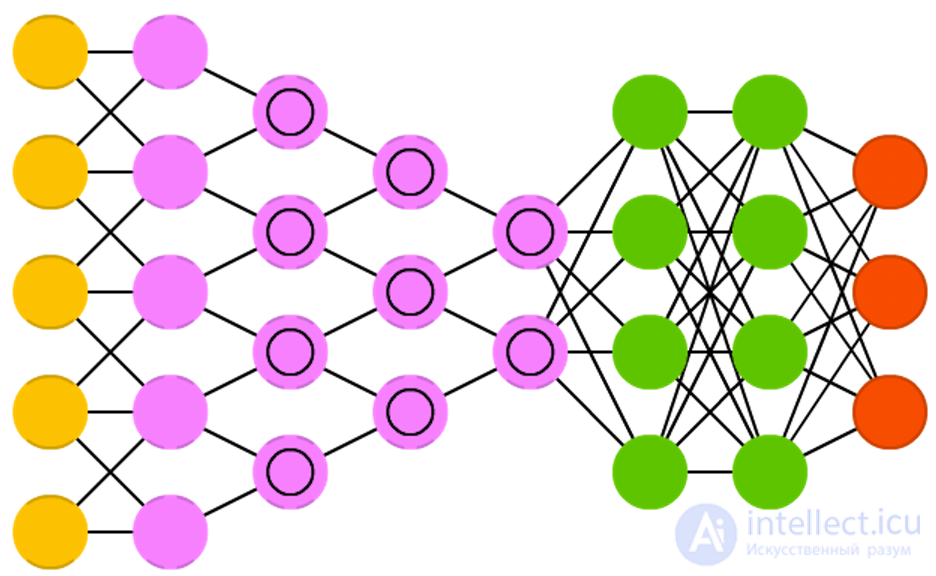
 Автоэнкодеры (Autoencoders, AE)
Автоэнкодеры (Autoencoders, AE) — нечто подобное FFNN, это скорее другой способ использования FFNN, чем принципиально новая архитектура. Основная идея автоэнкодеров — автоматическое кодирование (как при сжатии, а не при шифровании) информации, отсюда и название. Сеть напоминает по форме песочные часы, так как скрытый слой меньше, чем входной и выходной; к тому же она симметрична относительно средних слоев (одного или двух, в зависимости от четности/нечетности общего количества слоев). Самый маленьких слой почти всегда средний, в нем информация максимально сжата. Все, что расположено до середины — кодирующая часть, выше середины — декодирующая, а в середине (вы не поверите) — код. AE обучают методом обратного распространения ошибки, подавая входные данные и задавая ошибку равной разницу между входом и выходом. AE можно построить симметричными и с точки зрения весов, выставляя кодирующие веса равными декодирующим.
Bourlard, Hervé, and Yves Kamp. “Auto-association by multilayer perceptrons and singular value decomposition.” Biological cybernetics 59.4-5 (1988): 291-294.
Original Paper PDF
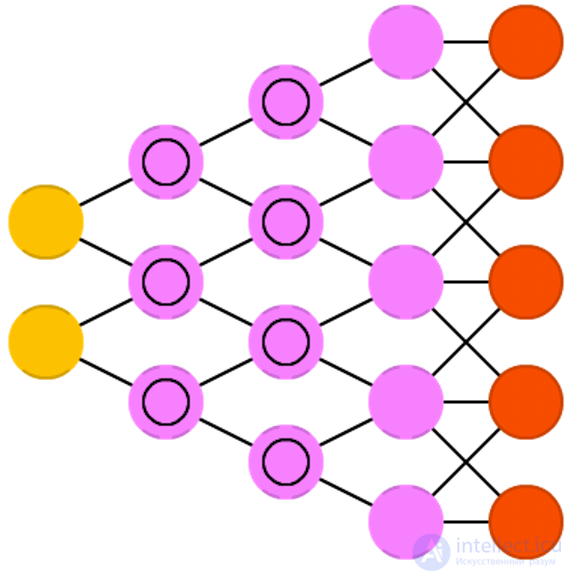
 Разреженный автоэнкодер (Sparse autoencoder, AE)
Разреженный автоэнкодер (Sparse autoencoder, AE) — в некоторой степени антипод AE. Вместо того чтобы обучать сеть представлять блоки информации на меньшем “пространстве”, мы кодируем информацию так, чтобы она занимала больше места. И вместо того чтобы заставлять систему сходиться в центре, а затем обратно расширяться до исходного размера, мы, наоборот, увеличиваем средние слои. Сети этого типа могут применяться для извлечения множества маленьких деталей из набора данных. Если бы мы стали обучать SAE тем же методом, что и AE, мы получили бы в большинстве случаев абсолютно бесполезную сеть, где на выходе получается ровно то же, что и на входе. Чтобы этого избежать, мы вместо входных данных выдаем на выходе входные данные плюс штраф за количество активированных нейронов в скрытом слое. Это в какой-то мере напоминает биологическую нейронную сеть (spiking neural network), в которой не все нейроны постоянно находятся в возбужденном состоянии.
Marc’Aurelio Ranzato, Christopher Poultney, Sumit Chopra, and Yann LeCun. “Efficient learning of sparse representations with an energy-based model.” Proceedings of NIPS. 2007.
Original Paper PDF
Архитектура
вариационных автоэнкодеров (VAE) такая же, как и у обычных, но обучают их другому — приблизительному вероятностному распределению входных образцов. Это в какой-то степени возвращение к истокам, так как VAE немножко ближе к машинам Больцмана. Тем не менее, они опираются на Байесовскую математику касательно вероятностных суждений и независимости, которые интуитивно понятны, но требуют сложных вычислений. Базовый принцип можно сформулировать так: принимать в расчет степень влияния одного события на другое. Если в одном месте происходит определенное событие, а другое событие случается где-то еще, то эти события вовсе не обязательно связаны. Если они не связаны, то распространение ошибки должно это учитывать. Это полезный подход, так как нейронные сети — своего рода огромные графы, и иногда бывает полезно исключить влияние одних нейронов на другие, проваливаясь в нижние слои.
Kingma, Diederik P., and Max Welling. “Auto-encoding variational bayes.” arXiv preprint arXiv:1312.6114 (2013).
Original Paper PDF
 Шумоподавляющие (помехоустойчивые) автоэнкодеры (Denoising autoencoders, DAE)
Шумоподавляющие (помехоустойчивые) автоэнкодеры (Denoising autoencoders, DAE) — это такое AE, которым на подаем на вход не просто данные, а данные с шумом (например, делая картинку более зернистой). Тем не менее, ошибку мы вычисляем прежним методом, сравнивая выходной образец с оригиналом без шума. Таким образом, сеть запоминает не мелкие детали, а крупные черты, так как запоминание небольших деталей, постоянно меняющихся из-за шума, часто не приводит никуда.
Vincent, Pascal, et al. “Extracting and composing robust features with denoising autoencoders.” Proceedings of the 25th international conference on Machine learning. ACM, 2008.
Original Paper PDF
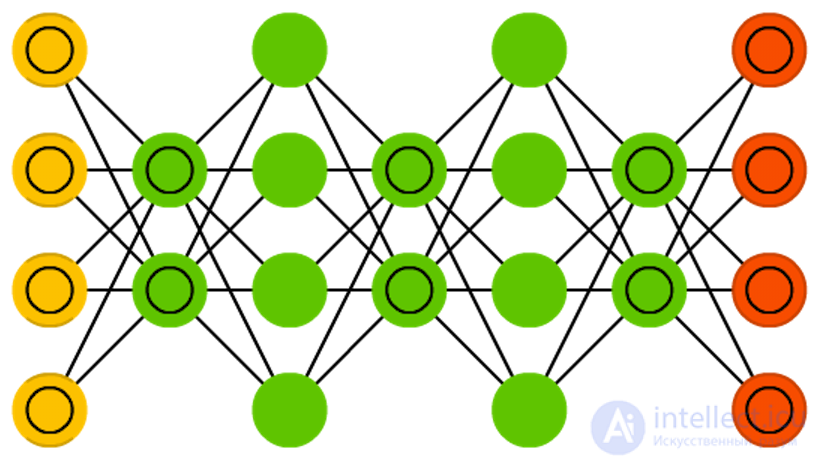 Глубокие сети доверия (Deep belief networks, DBN)
Глубокие сети доверия (Deep belief networks, DBN) — сети, представляющие собой композицию нескольких RBM или VAE. Такие сети показали себя эффективно обучаемыми одна за другой, когда каждая сеть должна научиться кодировать предыдущую. Этот метод также называют “жадное обучение”, он заключается в принятии оптимального на данный момент решение, чтобы получить подходящий, но, возможно, не оптимальный результат. DBN могут обучаться методами contrastive divergence или обратным распространением ошибки и учатся представлять данные в виде вероятностной модели, в точности как RBM или VAE. Однажды обученную и приведенную к стационарному состоянию модель можно использовать для генерации новых данных.
Bengio, Yoshua, et al. “Greedy layer-wise training of deep networks.” Advances in neural information processing systems 19 (2007): 153.
Original Paper PDF
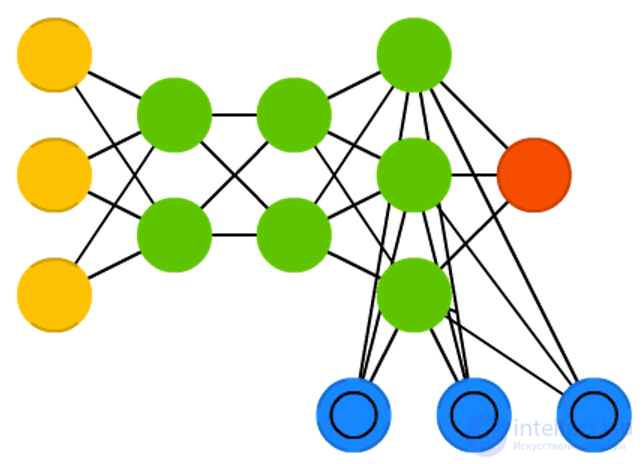
 Сверточные нейронные сети (convolutional neural networks, CNN) и глубокие сверточные нейронные сети (deep convolutional neural networks, DCNN)
Сверточные нейронные сети (convolutional neural networks, CNN) и глубокие сверточные нейронные сети (deep convolutional neural networks, DCNN) кардинально отличаются от других сетей. Они используются в основном для обработки изображений, иногда для аудио и других видов входных данных. Типичным способом применения CNN является классификация изображений: если на вход подается изображение кошки, сеть выдаст «кошка», если картинка собаки — «собака». Такие сети обычно используют «сканер», не обрабатывающий все данные за один раз. Например, если у вас есть изображение 200х200, вы захотите строить слой сети из 40 тысяч узлов. Вместо это сеть считает квадрат размера 20х20 (обычно из левого верхнего угла), затем сдвинется на 1 пиксель и считает новый квадрат, и т.д. Заметьте, что мы не разбиваем изображение на квадраты, а скорее ползем по нему. Эти входные данные затем передаются через сверточные слои, в которых не все узлы соединены между собой. Вместо этого каждый узел соединен только со своими ближайшими соседями. Эти слои имеют свойство сжиматься с глубиной, причем обычно они уменьшаются на какой-нибудь из делителей количества входных данных (например, 20 узлов в следующем слое превратятся в 10, в следующем — в 5), часто используются степени двойки. Кроме сверточных слоев есть также так называемые слои объединения (pooling layers). Объединение — это способ уменьшить размерность получаемых данных, например, из квадрата 2х2 выбирается и передается наиболее красный пиксель. На практике к концу CNN прикрепляют FFNN для дальнейшей обработки данных. Такие сети называются глубокими (DCNN), но названия их обычно взаимозаменяемы.
LeCun, Yann, et al. “Gradient-based learning applied to document recognition.” Proceedings of the IEEE 86.11 (1998): 2278-2324.
Original Paper PDF
Развертывающие нейронные сети (deconvolutional networks, DN), также называемые обратными графическими сетями, — это сверточные нейронные сети наоборот. Представьте, что вы передаете сети слово “кошка” и обучаете ее генерировать картинки кошек путем сравнения получаемых картинок с реальными изображениями кошек. DNN тоже можно объединять с FFNN. Стоит заметить, что в большинстве случаев сети передается не строка, а бинарный классифицирующий вектор: например, <0, 1> — это кошка, <1, 0> — собака, а <1, 1> — и кошка, и собака. Вместо слоев объединения, которые часто встречаются в CNN, здесь присутствуют аналогичные обратные операции, обычно интерполяцию или экстраполяцию.
Zeiler, Matthew D., et al. “Deconvolutional networks.” Computer Vision and Pattern Recognition (CVPR), 2010 IEEE Conference on. IEEE, 2010.
Original Paper PDF
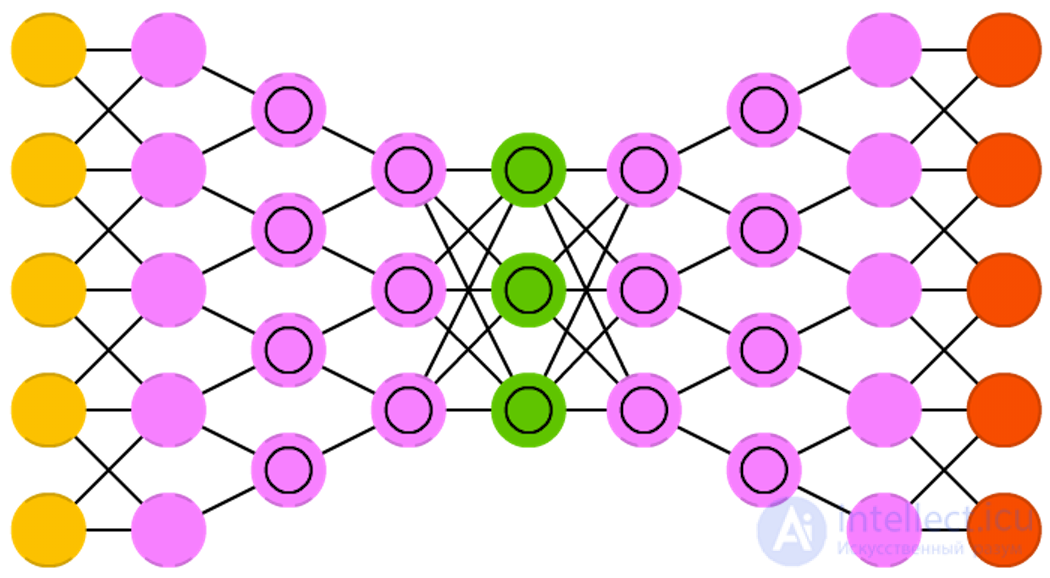
Название “Глубокие сверточные обратные глубинные сети (Deep convolutional inverse graphics networks, DCIGN)" может ввести в заблуждение, так как на самом деле это вариационные автоэнкодеры со сверточными и развертывающими сетыми в качестве кодирующей и декодирующей частей соответственно. Такие сети представляют черты изображения в виде вероятностей и могут научиться строить изображение кошки и собаки вместе, взглянув лишь на картинки только с кошками и только с собаками. Кроме того, вы можете показать этой сети фотографию вашего кота с надоедливой соседской собакой и попросить ее вырезать собаку и изображения, и DCIGN справится с этой задачей, даже если никогда не делала ничего подобного. Разработчики также продемонстрировали, что DCIGN может моделировать различные сложные преобразования изображений, например, изменение источника света или поворот 3D объектов. Такие сети обычно обучают методом обратного распространения.
Kulkarni, Tejas D., et al. “Deep convolutional inverse graphics network.” Advances in Neural Information Processing Systems. 2015.
Original Paper PDF

Генеративные состязательные сети (Generative adversarial networks, GAN) принадлежат другому семейству нейросетей, это близнецы — две сети, работающие вместе. GAN состоит из любых двух сетей (но чаще это сети прямого распространения или сверточные), где одна из сетей генерирует данные (“генератор”), а вторая — анализирует (“дискриминатор”). Дискриминатор получает на вход или обучающие данные, или сгенерированные первой сетью. То, насколько точно дискриминатор сможет определить источник данных, служит потом для оценки ошибок генератора. Таким образом, происходит своего рода соревнование, где дискриминатор учится лучше отличать реальные данные от сгенерированных, а генератор стремится стать менее предсказуемым для дискриминатора. Это работает отчасти потому, что даже сложные изображения с большим количеством шума в конце концов становятся предсказуемыми, но сгенерированные данные, мало отличающиеся от реальных, сложнее научиться отличать. GAN достаточно сложно обучить, так как задача здесь — не просто обучить две сети, но и соблюдать необходимый баланс между ними. Если одна из частей (генератор или дискриминатор) станет намного лучше другой, то GAN никогда не будет сходиться.
Goodfellow, Ian, et al. “Generative adversarial nets.” Advances in Neural Information Processing Systems. 2014.
Original Paper PDF
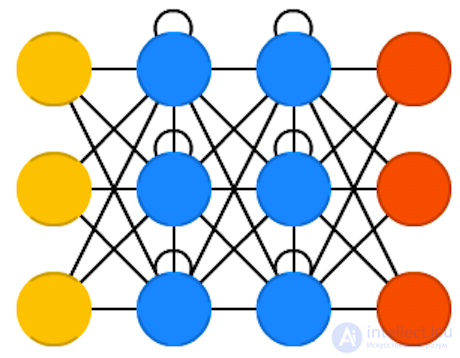
Рекуррентные нейронные сети (Recurrent neural networks, RNN) — это те же сети прямого распространения, но со смещением во времени: нейроны получают информацию не только от предыдущего слоя, но и от самих себя в результате предыдущего прохода. Следовательно, здесь важен порядок, в котором мы подаем информацию и обучаем сеть: мы получим разные результаты, если сначала скормим ей “молоко”, а затем “печеньки”, или если сначала “печеньки”, а потом уже “молоко”. У RNN есть одна большая проблема — это проблема исчезающего (или взрывного) градиента: в зависимости от используемой функции активации информация со временем теряется, так же как и в очень глубоких сетях прямого распространения. Казалось бы, это не такая уж серьезная проблема, так как это касается только весов, а не состояний нейронов, но именно в весах хранится информация о прошлом; если вес достигнет значения 0 или 1 000 000, то информация о прошлом состоянии станет не слишком информативной. RNN могут использоваться в самых разнообразных областях, так как даже данные, не связанные с течением времени (не звук или видео) могут быть представлены в виде последовательности. Картинка или строка текста могут подаваться на вход по одному пикселю или символу, так что вес будет использоваться для предыдущего элемента последовательности, а не для того, что случилось X секунд назад. В общем случае, рекуррентные сети хороши для продолжения или дополнения информации, например, автодополнения.
Elman, Jeffrey L. “Finding structure in time.” Cognitive science 14.2 (1990): 179-211.
Original Paper PDF
Долгая краткосрочная память (Long short term memory, LSTM) — попытка побороть проблему взрывного градиента, используя фильтры (gates) и блоки памяти (memory cells). Эта идея пришла, скорее, из области схемотехники, а не биологии. У каждого нейрона есть три фильтра: входной фильтр (input gate), выходной фильтр (output gate) и фильтр забывания (forget gate). Задача этих фильтров — сохранять информацию, останавливая и возобновляя ее поток. Входной фильтр определяет количество информации с предыдущего шага, которое будет храниться в блоке памяти. Выходной фильтр занят тем, что определяет, сколько информации о текущем состоянии узла получит следующий слой. Наличие фильтра забывания на первый взгляд кажется странным, но иногда забывать оказывается полезно: если нейросеть запоминает книгу, в начале новой главы может быть необходимо забыть некоторых героев из предыдущей. Показано, что LSTM могут обучаться действительно сложным последовательностям, например, подражать Шекспиру или сочинять простую музыку. Стоит отметить, что так как каждый фильтр хранит свой вес относительно предыдущего нейрона, такие сети достаточно ресурсоемки.
Hochreiter, Sepp, and Jürgen Schmidhuber. “Long short-term memory.” Neural computation 9.8 (1997): 1735-1780.
Original Paper PDF
Управляемые рекуррентные нейроны (Gated recurrent units, GRU) — разновидность LSTM. У них на один фильтр меньше, и они немного иначе соединены: вместо входного, выходного фильтров и фильтра забывания здесь используется фильтр обновления (update gate). Этот фильтр определяет и сколько информации сохранить от последнего состояния, и сколько информации получить от предыдущего слоя. Фильтр сброса состояния (reset gate) работает почти так же, как фильтр забывания, но расположен немного иначе. На следующие слои отправляется полная информация о состоянии — выходного фильтра здесь нет. В большинстве случаем GRU работают так же, как LSTM, самое значимое отличие в том, что GRU немного быстрее и проще в эксплуатации (однако обладает немного меньшими выразительными возможностями).
Chung, Junyoung, et al. “Empirical evaluation of gated recurrent neural networks on sequence modeling.” arXiv preprint arXiv:1412.3555 (2014).
Original Paper PDF
Нейронные машины Тьюринга (Neural Turing machines, NMT) можно определить как абстракцию над LSTM и попытку “достать” нейросети из “черного ящика”, давая нам представление о том, что происходит внутри. Блок памяти здесь не встроен в нейрон, а отделен от него. Это позволяет объединить производительность и неизменность обычного цифрового хранилища данных с производительностью и выразительными возможностями нейронной сети. Идея заключается в использовании адресуемой по содержимому памяти и нейросети, которая может читать из этой памяти и писать в нее. Они называются нейронными машинами Тьюринга, так как являются полными по Тьюриингу: возможность читать, писать и изменять состояние на основании прочитанного позволяет выполнять все, что умеет выполнять универсальная машина Тьюринга.
Graves, Alex, Greg Wayne, and Ivo Danihelka. “Neural turing machines.” arXiv preprint arXiv:1410.5401 (2014).
Original Paper PDF
Двунаправленные RNN, LSTM и GRU (BiRNN, BiLSTM и BiGRU) не изображены на схеме, так как выглядят в точности так же, как их однонаправленные коллеги. Разница лишь в том, что эти нейросети связаны не только с прошлым, но и с будущим. Например, однонаправленная LSTM может научиться прогнозировать слово “рыба”, получая на вход буквы по одной. Двунаправленная LSTM будет получать также и следующую букву во время обратного прохода, открывая таким образом доступ к будущей информации. А значит, нейросеть можно обучить не только дополнять информацию, но и заполнять пробелы, так, вместо расширения рисунка по краям, она может дорисовывать недостающие фрагменты в середине.
Schuster, Mike, and Kuldip K. Paliwal. “Bidirectional recurrent neural networks.” IEEE Transactions on Signal Processing 45.11 (1997): 2673-2681.
Original Paper PDF
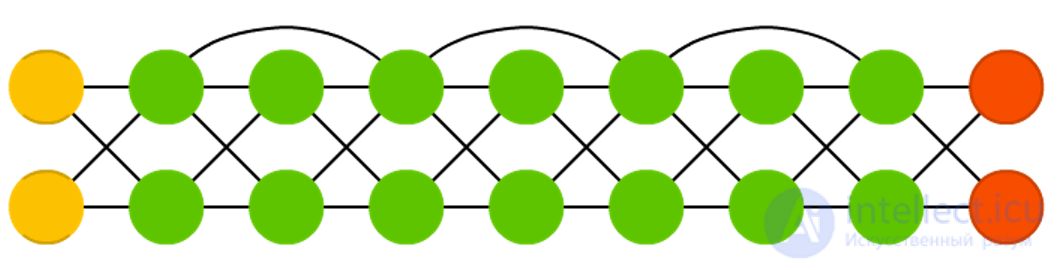
Глубокие остаточные сети (Deep residual networks, DRN) — это очень глубокие FFNN с дополнительными связями между слоями, которых обычно от двух до пяти, соединяющими не только соседние слои, но и более отдаленные. Вместо того, чтобы искать способ находить соответствующие исходным данным входные данные через, скажем, пять слоев, сеть обучена ставить в соответствие входному блоку пару “выходной блок + входной блок”. Таким образом входные данные проходят через все слои нейросети и подаются на блюдечке последним слоям. Было показано, что такие сети могут обучаться образцам глубиной до 150 слоев, что намного больше, чем можно ожидать от обычной 2-5-слойной нейросети. Тем не менее, было доказано, что сети этого типа на самом деле просто RNN без явного использования времени, а также их часто сравнивают с LSTM без фильтров.
He, Kaiming, et al. “Deep residual learning for image recognition.” arXiv preprint arXiv:1512.03385 (2015).
Original Paper PDF
Нейронные эхо-сети (Echo state networks, ESN) — еще один вид рекуррентных нейросетей. Они выделяются тем, что связи между нейронами в них случайны, не организованы в аккуратные слои, и обучаются они по-другому. Вместо подачи на вход данных и обратного распространения ошибки, мы передаем данные, обновляем состояния нейронов и в течение некоторого времени следим за выходными данными. Входной и выходной слои играют нестандартную роль, так как входной слой служит для инициализации системы, а выходной слой — в качестве наблюдателя за порядком активации нейронов, который проявляется со временем. Во время обучения изменяются связи только между наблюдателем и скрытыми слоями.
Jaeger, Herbert, and Harald Haas. “Harnessing nonlinearity: Predicting chaotic systems and saving energy in wireless communication.” science 304.5667 (2004): 78-80.
Original Paper PDF
Extreme learning machines (ELM) — это те же FFNN, но со случайными связями между нейронами. Они очень похожи на LSM и ESN, но используются скорее подобно сетям прямого распространения, и не это связано не с тем, что они не являются рекуррентными или импульсными, а с тем, что их обучают методом обратного распространения ошибки.
Cambria, Erik, et al. “Extreme learning machines [trends & controversies].” IEEE Intelligent Systems 28.6 (2013): 30-59.
Original Paper PDF
Машины неустойчивых состояний (Liquid state machines, LSM) подобны ESN. Главное их отличие в том, что LSM — это разновидность импульсных нейронных сетей: на замену сигмоидальной кривой приходят пороговые функции, и каждый нейрон также является накопительным блоком памяти. Когда состояние нейрона обновляется, значение рассчитывается не как сумма его соседей, а складывается с самим собой. Как только порог превышен, энергия освобождается и нейрон посылает импульс другим нейронам.
Maass, Wolfgang, Thomas Natschläger, and Henry Markram. “Real-time computing without stable states: A new framework for neural computation based on perturbations.” Neural computation 14.11 (2002): 2531-2560.
Original Paper PDF
Метод опорных векторов (Support vector machine, SVM) служит для нахождения оптимальных решений в задачах классификации. В классическом смысле метод способен категоризировать линейно разделяемые данные: например, определить, на каком рисунке изображен Гарфилд, а на каком — Снупи. В процессе обучения сеть как бы размещает всех Гарфилдов и Снупи на 2D-графике и пытается разделить данные прямой линией так, чтобы с каждой стороны были данные только одного класса и чтобы расстояние от данных до линии было максимальным. Используя трюк с ядром, можно классифицировать данные размерности n. Построив 3D граф, мы сможем отличить Гарфилда от Снупи и от кота Саймона, и чем выше размерность, тем больше мультяшных персонажей можно классифицировать. Этот метод не всегда рассматривается как нейронная сеть.
Cortes, Corinna, and Vladimir Vapnik. “Support-vector networks.” Machine learning 20.3 (1995): 273-297.
Original Paper PDF
И наконец, последний обитатель нашего зоопарка — самоорганизующаяся карта Кохонена (Kohonen networks, KN, или organising (feature) map, SOM, SOFM). KN использует соревновательное обучение для классификации данных без учителя. Сеть анализирует свои нейроны на предмет максимального совпадения с входными данными. Наиболее подходящие нейроны обновляются так, чтобы еще ближе походить на входные данные, кроме того, к входным данным приближаются и веса их соседей. То, насколько изменится состояние соседей, зависит от расстояния до наиболее подходящего узла. KN также не всегда относят к нейронным сетям.
Kohonen, Teuvo. “Self-organized formation of topologically correct feature maps.” Biological cybernetics 43.1 (1982): 59-69.
Original Paper PDF
Представленные результаты и исследования подтверждают, что применение искусственного интеллекта в области виды архитектур нейронных сетей имеет потенциал
для революции в различных связанных с данной темой сферах. Надеюсь, что теперь ты понял что такое виды архитектур нейронных сетей
и для чего все это нужно, а если не понял, или есть замечания,
то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории
Computational Neuroscience (вычислительная нейронаука) Теория и приложения искусственных нейронных сетей

Комментарии