Радиоприемники и другие радиотехнические устройства имеют собственные электрические шумы. Радиосистемам могут быть поставлены шумовые помехи .
В линейных радиотехнических устройствах может применяться принцип суперпозиции: прохождение сигналов и шумов рассматривается раздельно. На рис.1 проиллюстрирован этот принцип.
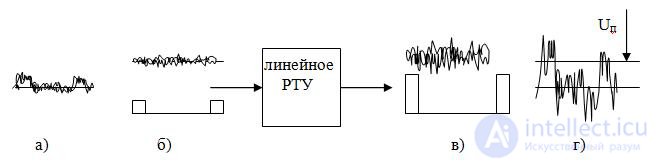
Рис. 1. Адиттивная смесь и принцип суперпозиции
Аддитивная смесь сигнала и шума на входе радиотехнического устройства (РТУ) имеет вид а). Ее можно рассматривать раздельно: отдельно сигнал и шум (вариант б). Сигнал и шум проходит линейное РТУ раздельно и раздельно появляются на выходе (вариант в). Хотя эта аддитивная смесь реально выглядит на осциллографе в варианте г), что можно получить, сложив составляющие варианта в).
Принцип раздельного рассмотрения сигнала и шума не приемлем там, где смесь на входе РТУ мультикативная или в самом РТУ имеются нелинейные связи или происходит процесс ограничения по амплитуде.
Первым этапом приема сигналов является процедура его обнаружения. Качество обнаружения характеризуется вероятностями правильного и не правильного обнаружения. Первый показатель обычно ассоциируется с вероятностью обнаружения Роб , второй – с вероятностью ложной тревоги Рлт. Хотя существуют такие показатели, как вероятность пропуска сигнала Рпрп. Пропуск сигнала и обнаружение – противоположные события.
Роб = 1- Рпрп
Обнаружение сигнала происходит тогда, когда он преодолевает некоторый порог Uп , как показано на рис.1г. Если порог низок, то его могут преодолеть и выбросы шумов. Это ложная тревога, поскольку регистрируется появление сигнала. Слишком высокий уровень не позволит обнаруживать слабые сигналы. Будут пропуски сигналов. Выбор порогового уровня – непростая радиотехническая задача.
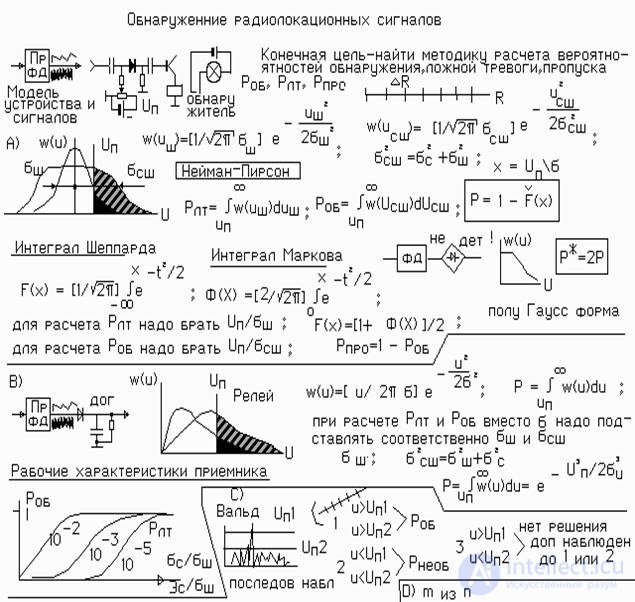
Рис. 2. Обнаружение радиолокационного сигнала – статистическая задача
В современных РЛС сигналы в шуме обнаруживают автоматические обнаружители. Об этом говорит сайт https://intellect.icu . На их вход могут подаватьсясигналы как с выхода фазовых детекторов, так и с выхода амплитудных. В обоих случаях решается вероятностная задача.
Обнаружитель Неймана – Пирсона однопороговый. В том случае, когда аддитивная смесь сигнала и шума превышает порог, происходит регистрация (обнаружение). Такой вид обнаружения называется «правильным обнаружением» или просто «обнаружением». Вероятность его обозначается Роб.
Если шум превысит пороговый уровень, то произойдет ложная регистрация сигнала, хотя его в шуме нет. Этот вариант регистрации называется «неправильным обнаружением» или «лож-ной тревогой» Рлт. Вероятности Роб и Рлт в полной мере характеризуют потребительское каче-ство РЛС при работе в режиме поиска целей.
Фазовый детектор радара выделяет мгновенные значения отраженного сигнала. Моделью сигнала может быть нормальный стационарный процесс с нулевым средним значением.
Адиттивная смесь сигнала и шума имеет ту же модель.
Плотности вероятностей амплитуд шума, сигнала и адиттивной смеси будет иметь вид кривой Гаусса, как показано на рисунке. Причем, дисперсия смеси sсш2 рассчитывается суммированием дисперсий составляющих.
sсш2= sс2 + sш2
Вероятность обнаружения Роб рассчитывается интегрированием закона распределения смеси шума и сигнала w(uсш) от относительногго порогового уровнях=Uп / sсш до бесконечности.
Вероятность ложной тревоги Р лт рассчитывается аналогично. Но под интегралом должно стоять распределение шума w(uш). При этом х=Uп / sш .
К сожалению, интеграл от функции Гаусса не берется напрямую. Поэтому придется воспользоваться результатами численного интегрирования интеграла Шеппарда F^(x) или его разновидности – интеграла Маркова.
Для получения результатов достаточно вычислить значение х=Uп / sсш или х=Uп /sш соот-ветственно и по таблицам интегралов вероятностей Шеппарда или Маркова найти необходи-мые вероятности Роб и Р лт .
Интегралы вероятностей Маркова можно найти, например, в справочнике по математике Бронштейна и Семендяева.
Амплитудный детектор выделяет огибающую сигналов. В соответствие с принятой моделью, закон распределения амплитуд Релея. Вычисление вероятностей проводитсяанало-гично выше описанной методике. Интеграл от функции Релея берется. Поэтому вероятности
Роб и Р лт рассчитываются без проблем.
Кроме обнаружителя Неймана-Пирсона существуют более совершенные, в том числе обнаружители Вальда, минимаксные, логические и другие.

Комментарии
Оставить комментарий
Радиотехнические системы
Термины: Радиотехнические системы