Лекция
Привет, Вы узнаете о том , что такое операционная система мягкого времени, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое операционная система мягкого времени, ос жесткого реального времени, операционная система реального времени, осрв , настоятельно рекомендую прочитать все из категории Операционные системы и системное программировние.
операционная система реального времени , осрв (англ. real-time operating system, RTOS) — тип операционной системы, основное назначение которой — предоставление необходимого и достаточного набора функций для работы систем реального времени на конкретном аппаратном оборудовании.
Реальное время в операционных системах — это способность операционной системы обеспечить требуемый уровень сервиса в определенный промежуток времени.
Хорошая ОСРВ имеет предсказуемое поведение при всех сценариях нагрузки, включая одновременные прерывания и выполнение потоков.
Детерминизм по времени – свойство процесса, описывающее характер выполнения операций во времени
Длительность итерации цикла (период цикла) – время, необходимое на выполнение одной итерации цикла
Джиттер – отклонение фактического времени итерации цикла от заданного
Встраиваемая ( embedded ) система – компьютерная система, которая, как правило, является частью большей системы. Встраиваемая система обычно работает без интерфейса пользователя (без монитора, клавиатуры, мыши).

Операционные системы реального времени иногда делят на два типа — системы жесткого реального времени и системы мягкого реального времени .
Операционная система, которая может обеспечить требуемое время выполнения задачи реального времени даже в худших случаях, называетсяоперационной системой жесткого реального времени.
Операционная система, которая может обеспечить требуемое время выполнения задачи реального времени в среднем, называется операционной системой мягкого реального времени.
Системы жесткого реального времени не допускают задержек реакции системы, так как это может привести к:
Ситуация, в которой обработка событий происходит за время, большее предусмотренного, в системе жесткого реального времени считается фатальной ошибкой. При возникновении такой ситуации операционная система прерывает операцию и блокирует ее, чтобы, насколько возможно, не пострадала надежность и готовность остальной части системы. Примерами систем жесткого реального времени могут быть бортовые системы управления (на самолете, космическом аппарате, корабле, и пр.), системы аварийной защиты, регистраторы аварийных событий .
В системе мягкого реального времени задержка реакции считается восстановимой ошибкой, которая может привести к увеличению стоимости результатов и снижению производительности, но не является фатальной. Примером может служить работа компьютерной сети . Если система не успела обработать очередной принятый пакет, это приведет к остановке на передающей стороне и повторной посылке (в зависимости от протокола). Данные при этом не теряются, но производительность сети снижается.
Основное отличие систем жесткого и мягкого реального времени можно охарактеризовать так: система жесткого реального времени никогда не опоздает с реакцией на событие, система мягкого реального времени не должна опаздывать с реакцией на событие .
Часто операционной системой реального времени считают лишь систему, которая может быть использована для решения задач жесткого реального времени. Это определение означает наличие у ОСРВ необходимых инструментов, но также означает, что эти инструменты необходимо правильно использовать .
Большинство программного обеспечения ориентировано на «мягкое» реальное время. Для подобных систем характерно:
Классическим примером задачи, где требуется ОСРВ, является управление роботом, берущим деталь с ленты конвейера. Деталь движется, и робот имеет лишь маленький промежуток времени, когда он может ее взять. Если он опоздает, то деталь уже не будет на нужном участке конвейера, и следовательно, работа не будет выполнена, несмотря на то, что робот находится в правильном месте. Если он подготовится раньше, то деталь еще не успеет подъехать, и он заблокирует ей путь.
Управление автоматическими или автоматизированными комплексами, предъявляющими высокие требования к времени выполнения задач осуществляется операционными системами реального времени. Они обеспечивают гарантированное время реакции на внешние события и минимальные задержки.
Операционная система реального времени, ОС РВ (англ. Real-Time Operating System) — тип операционной системы, как правило, специального назначения. Для этого термина есть различные определения, порой противоречащие друг другу:
Для систем реального времени характерно следующее:
Классическим примером задачи, где требуется ОС РВ, является управление роботом, берущим деталь с ленты конвейера. Деталь движется и робот имеет лишь маленький промежуток времени, когда он может ее взять. Если он опоздает, то деталь уже не будет на нужном участке конвейера, и следовательно, работа не будет сделана, несмотря на то, что робот находится в правильном месте. Если он спозиционируется раньше, то деталь еще не успеет подъехать, и он заблокирует ей путь.
Динамические свойства программ реального времени принято характеризовать тремя определениями: программы «жесткого» (hard), «мягкого» (soft) и интерактивного («условного») реального времени.
Жесткое реальное время. Предусматривает наличие гарантированного времени отклика системы на конкретное событие, например, аппаратное прерывание, выдачу команды управления и т.п. Абсолютная величина времени отклика большого значения не имеет. Так, если необходимо, чтобы программа отработала некоторую команду за 1 миллисекунду, но она справляется с этим заданием лишь в 95% случаев, а в 5% не укладывается в норматив, такую систему нельзя охарактеризовать как работающую в жестком реальном времени. Если же команду нужно отработать в течение часа, что и происходит в 100% случаев – налицо жесткое реальное время.
В большинстве русскоязычной литературы такие системы называют системами с детерминированным временем. При практическом применении время реакции должно быть минимальным.
Мягкое реальное время. В этом случае ожидающееся время отклика системы является величиной скорее индикативной, нежели директивной. Конечно, предполагается что в большинстве случаев (процентов 80 — 90) отклик уложится в заданные пределы. Однако и остальные варианты – в том числе полное отсутствие реакции системы – не должны приводить к плачевным результатам. Обычно считается, что если временной норматив превышен на один порядок, то это еще терпимо .
Интерактивное реальное время. Является скорее психологической, нежели технической характеристикой. Определяет время, в течение которого оператор – человек – способен спокойно, без нервозности, ожидать реакции системы на данные им указания. В качестве примера можно привести весьма популярные сегодня игры из категории «стратегии реального времени» (real-time strategy, см. например квазар на основе Warhammer).
В системах реального времени необходимо введение некоторого директивного срока (в англоязычной литературе – deadline), до истечения которого задача должна обязательно (для систем мягкого реального времени – желательно) выполниться. Этот директивный срок используется планировщиком задач как для назначения приоритета задачи при ее запуске, так и при выборе задачи на выполнение.
Зачастую под СРВ безусловно понимают встроенные операционные системы, на деле же, существует различие между системами реального времени и встроенными системами. От встроенной системы не всегда требуется, чтобы она имела предсказуемое поведение, и в таком случае она не является системой реального времени. Однако даже беглый взгляд на возможные встроенные системы позволяет утверждать, что большинство встроенных систем нуждается в предсказуемом поведении, по крайней мере, для некоторой функциональности, и таким образом, эти системы можно отнести к системам реального времени.
Мартин Тиммерман (директор компании-разработчика встраиваимых систем Dedicated Systems Experts) сформулировал следующие необходимые требования для ОС РВ:
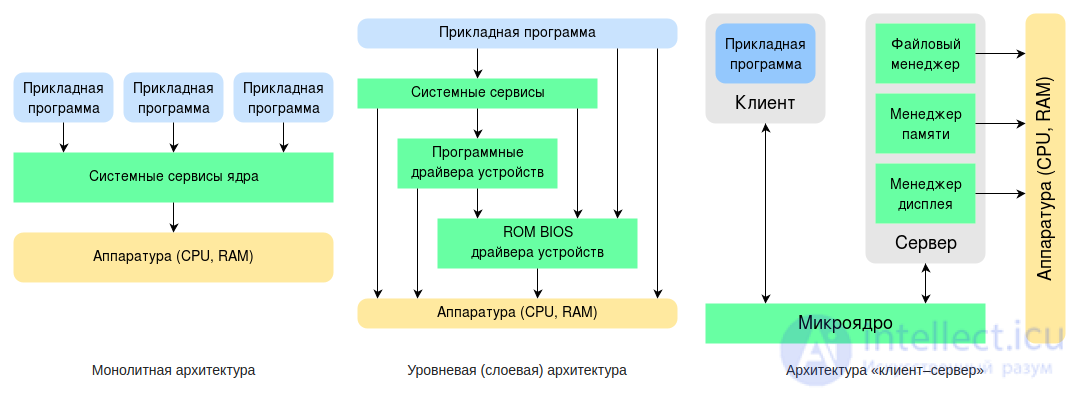
В течение последних 25-30 лет структура операционных систем эволюционировала от монолитной к многослойной структуре ОС и далее к архитектуре клиент-сервер. Эти решения в той или иной степени нашли применение и при разработке операционных систем реального времени.
Монолитная архитектура представляет систему, состоящую из набора взаимодействующих модулей. Приложения обращаются к системе через API модулей. Изменения одного модуля влияют на другие модули. Чем больше модулей, чем сложнее они связаны между собой, тем тем менее предсказуемо поведение такой системы в процессе эксплуатации. Кроме того, возникают трудности для использования ОС такого типа в распределенной многопроцессорной системе.
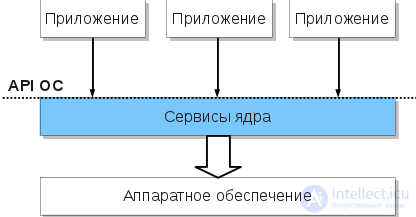
Рис.1. Монолитная архитектура ОС РВ
Многослойная архитектура описывает систему, состоящую из нескольких функциональных уровней. Приложение может обращаться к аппаратным ресурсам как через системные вызовы ядра и системные службы, так и через API уровней. Вообще-то, возможность обращения к нижележащим слоям минуя верхние уровни семантически неверно, но для систем реального времени такая организация позволяет увеличить предсказуемость системы и снизить время отклика. Недостатком многослойной архитектуры является то, что изменения одного слоя влияют на соседние слои. Еще один недостаток, свойственный многослойной архитектуре – отсутствие многозадачности. Однако, далеко не всегда и не всем системам реального времени требуется поддержка многозадачности. Например, сложно обосновать необходимость многозадачного режима для встроенной ОС промышленного робота, подающего детали на конвейер.
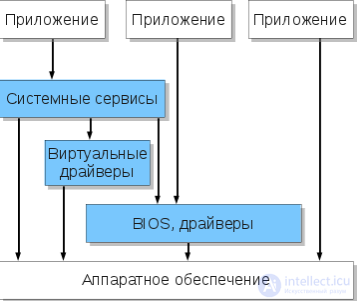
Рис.2. Многослойная архитектура ОС РВ
Клиент-серверная архитектура ОС основана на минимизации количества функций, выполняемых ядром (точнее, микроядром) такой системы. Например, на уровне ядра выполняются только планировщик, примитивы синхронизации и служба сообщений. Вся остальная функциональность выносится на пользовательский уровень и реализуется через серверы. Приложения-клиенты обращаются к ним и получают от них ответы путем обмена сообщениям через службу сообщений уровня ядра.
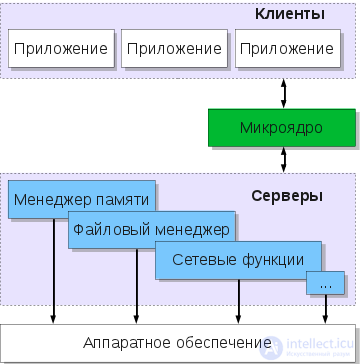
Рис.3 Клиент-серверная архитектура ОС РВ
Клиент-серверная архитектура позволяет создавать масштабируемые ОС и упрощает распределение в многопроцессорной системе. При эксплуатации системы замена одного модуля не вызывает эффекта “снежного кома”; кроме того, сбой модуля не всегда влечет за собой отказ системы в целом. Появилась возможность динамической загрузки и выгрузки модулей. Главной проблемой в этой модели является защита памяти, поскольку серверные процессы должны быть защищены. При каждом запросе сервиса система должна переключаться с контекста приложения на контекст сервера. При поддержке защиты памяти время переключения с одного процесса на другой увеличивается.
Таблица сравнения ОСРВ и обычных операционных систем :
| ОС реального времени | ОС общего назначения | |
|---|---|---|
| Основная задача | Успеть среагировать на события, происходящие на оборудовании | Оптимально распределить ресурсы компьютера между пользователями и задачами |
| На что ориентирована | Обработка внешних событий | Обработка действий пользователя |
| Как позиционируется | Инструмент для создания конкретного аппаратно-программного комплекса реального времени | Воспринимается пользователем как набор приложений, готовых к использованию |
| Кому предназначена | Квалифицированный разработчик | Пользователь средней квалификации |
Многие операционные системы общего назначения также поддерживают указанные выше сервисы. Однако ключевым отличием сервисов ядра ОСРВ является детерминированный, основанный на строгом контроле времени, характер их работы. В данном случае под детерминированностью понимается то, что для выполнения одного сервиса операционной системы требуется временной интервал заведомо известной продолжительности. Теоретически это время может быть вычислено по математическим формулам, которые должны быть строго алгебраическими и не должны включать никаких временных параметров случайного характера. Любая случайная величина, определяющая время выполнения задачи в ОСРВ, может вызвать нежелательную задержку в работе приложения, тогда следующая задача не уложится в свой квант времени, что послужит причиной для ошибки .
В этом смысле операционные системы общего назначения не являются детерминированными. Их сервисы могут допускать случайные задержки в своей работе, что может привести к замедлению ответной реакции приложения на действия пользователя в заведомо неизвестный момент времени. При проектировании обычных операционных систем разработчики не акцентируют свое внимание на математическом аппарате вычисления времени выполнения конкретной задачи и сервиса. Это не является критичным для подобного рода систем .
Операционные системы общего назначения
• Процессорное время делится между программами
• Операционные системы могут прерывать выполнение Виртуальных Приборов (ВП) с высоким приоритетом – Множество программ выполняются в фоновом режиме — заставки , дисковые утилиты, антивирусные программы и т. д. – Должны выполняться сервисные прерывания – от клавиатуры, мыши, сетевой карты ( Ethernet ) и т. д.
• Не могут гарантировать детерминизм по времени – недетерминированные системы
Операционные системы реального времени (ОСРВ)
Гарантируют, что задачи с более высоким приоритетом будут выполняться в первую очередь
• Не требуют взаимодействия с пользователем через периферийные устройства (клавиатуру, мышь и т. д. )
Lab. VIEW Real-Time может выполнять программы на следующих платформах :
| Выбор операционной Системы | |
| ОС общего назначения | Операционные системы реального времени (ОСРВ) |
|
• Сбор данных (ввод, вывод сигналов) Анализ данных в режиме Offline Представление данных |
• Регулирование по замкнутому циклу • Принятие решений критических по времени • Длительная непрерывная работа • Автономная работа • Повышенная надежность |
Пример


В своем развитии ОСРВ строились на основе следующих архитектур:
Архитектуры операционных систем реального времени
Ядро ОСРВ обеспечивает функционирование промежуточного абстрактного уровня ОС, который скрывает от прикладного ПО специфику технического устройства процессора (нескольких процессоров) и связанного с ним аппаратного обеспечения .
Указанный абстрактный уровень предоставляет для прикладного ПО пять основных категорий сервисов :
В дополнение к сервисам ядра, многие ОСРВ предлагают линейки дополнительных компонентов для организации таких высокоуровневых понятий, какфайловая система, сетевое взаимодействие, управление сетью, управление базой данных, графический пользовательский интерфейс и т. д. Хотя многие из этих компонентов намного больше и сложнее, чем само ядро ОСРВ, они, тем не менее, основываются на его сервисах. Каждый из таких компонентов включается во встроенную систему, только если ее сервисы необходимы для выполнения встроенного приложения и только для того, чтоб свести расход памяти к минимуму .
В ОСРВ используются различные службы времени. Операционная система отслеживает текущее время, в определенное время запускает задачи и потоки и приостанавливает их на определенные интервалы. В службах времени ОСРВ используются часы реального времени. Обычно используются высокоточные аппаратные часы. Для отсчета временных интервалов на основе часов реального времени создаются таймеры.
Для каждого процесса и потока определяются часы процессорного времени. На базе этих часов создаются таймеры, которые измеряют перерасход времени процессом или потоком, позволяя динамически выявлять программные ошибки или ошибки вычисления максимально возможного времени выполнения. В высоконадежных, критичных ко времени системах важно выявление ситуаций, при которых задача превышает максимально возможное время своего выполнения, т.к. при этом работа системы может выйти за рамки допустимого времени отклика. Часы времени выполнения позволяют выявить возникновение перерасхода времени и активизировать соответствующие действия по обработке ошибок.
Большинство ОСРВ оперируют относительным временем. Что-то происходит «до» и «после» некоторого другого события. В системе, полностью управляемой событиями, необходим часовой механизм (ticker), т.к. там нет квантования времени (time slicing). Однако, если нужны временные метки для некоторых событий или необходим системный вызов типа «ждать одну секунду», то нужен тактовый генератор и/или таймер.
Синхронизация в ОСРВ осуществляется с помощью механизма блокирования (или ожидания) до наступления некоторого события. Абсолютное время не используется.
Реализации в ОСРВ других концептуальных абстракций подобны их реализациям в традиционных ОС.
Время задержки на переключение контекста потока напрямую зависит от конфигурации памяти, т.е. от модели защиты памяти. Рассмотрим четыре наиболее распространенных в ОСРВ модели защиты памяти.
Фундаментальное требование к памяти в системе реального времени заключается в том, что время доступа к ней (памяти) должно быть ограничено (или, другими словами, предсказуемо). Прямым следствием становится запрет на использование для процессов реального времени техники вызова страниц по запросу (подкачка с диска). Поэтому системы, обеспечивающие механизм виртуальной памяти, должны уметь блокировать процесс в оперативной памяти, не допуская подкачки. Итак, подкачка недопустима в ОСРВ, потому что непредсказуема.
Если поддерживается страничная организация памяти (paging), соответствующее отображение страниц в физические адреса должно быть частью контекста процесса. Иначе опять появляется непредсказуемость, неприемлемая для ОСРВ.
Для процессов, не являющихся процессами жесткого реального времени, возможно использование механизма динамического распределения памяти, однако при этом ОСРВ должна поддерживать обработку таймаута на запрос памяти, т.е. ограничение на предсказуемое время ожидания.
В обычных ОС при использовании механизма сегментации памяти для борьбы с фрагментацией применяется процедура уплотнения после сборки мусора. Однако такой подход неприменим в среде реального времени, т.к. во время уплотнения перемещаемые задачи не могут выполняться, что ведет к непредсказуемости системы. В этом состоит основная проблема применимости объектно-ориентированного подхода к системам реального времени. До тех пор, пока проблема уплотнения не будет решена, C++ и JAVA останутся не самым лучшим выбором для систем жесткого реального времени.
В системах
продолжение следует...
Часть 1 Операционная система мягкого и жесткого реального времени и отличие от ОС общего назначения - особенности,
Часть 2 Взаимодействие между задачами и разделение ресурсов - Операционная система мягкого
Часть 3 Характеристики операционных систем реального времени - Операционная система мягкого и
В заключение, эта статья об операционная система мягкого времени подчеркивает важность того что вы тут, расширяете ваше сознание, знания, навыки и умения. Надеюсь, что теперь ты понял что такое операционная система мягкого времени, ос жесткого реального времени, операционная система реального времени, осрв и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Операционные системы и системное программировние

Комментарии