Лекция
Это продолжение увлекательной статьи про операционная система мягкого времени.
...
жесткого реального времени обычно применяется статическое распределение памяти. В системах мягкого реального времени возможно динамическое распределение памяти, без виртуальной памяти и без уплотнения.
Многозадачным системам необходимо распределять доступ к ресурсам. Одновременный доступ двух и более процессов к какой-либо области памяти или другим ресурсам представляет определенную угрозу. Существует 3 способа решения этой проблемы :
ОСРВ обычно не используют первый способ, потому что пользовательское приложение не может контролировать процессор столько, сколько хочет. Однако во многих встроенных системах и ОСРВ позволяется запускать приложения в режиме ядра для доступа к системным вызовам и дается контроль над окружением исполнения без вмешательства ОС.
На однопроцессорных системах наилучшим решением является приложение, запущенное в режиме ядра , которому позволено блокирование прерываний. Пока прерывание заблокировано, приложение использует ресурсы процесса единолично и никакая другая задача или прерывание не может выполняться. Таким образом защищаются все критичные ресурсы. После того как приложение завершит критические действия, оно должно разблокировать прерывания, если таковые имеются. Временное блокирование прерывания позволено только тогда, когда самый долгий промежуток выполнениякритической секции меньше, чем допустимое время реакции на прерывание. Обычно этот метод защиты используется, только когда длина критического кода не превышает нескольких строк и не содержит циклов. Этот метод идеально подходит для защиты регистров.
Когда длина критического участка больше максимальной или содержит циклы, программист должен использовать механизмы, идентичные или имитирующие поведение систем общего назначения, такие, как семафоры и посылка сигналов.
Операционные системы реального времени, поддерживающие многозадачность, должны использовать такие средства межпроцессного взаимодействия, которые гарантируют синхронизацию без взаимоисключений и с минимальными задержками.
В идеальной многозадачной системе все процессы, выполняющиеся параллельно, независимы друг от друга (т.е., асинхронны). На практике такая ситуация маловероятна, поскольку рано или поздно возникают ситуации, когда параллельным процессам необходим доступ к некоторым общим ресурсам. Для этого необходимо введение на уровне ОС средств, предоставляющих такую возможность.
При выполнении параллельных процессов может возникать проблема, когда каждый процесс, обращающийся к разделяемым данным, исключает для всех других процессов возможность одновременного с ним обращения к этим данным - это называется взаимоисключением (mutual exclusion).
Ресурс, который допускает обслуживание только одного пользователя за один раз, называется критическим ресурсом. Если несколько процессов хотят пользоваться критическим ресурсом в режиме разделения времени, им следует синхронизировать свои действия таким образом, чтобы этот ресурс всегда находился в распоряжении не более чем одного их них.
Участки процесса, в которых происходит обращение к критическим ресурсам, называются критическими участками.
Для организации коммуникации между одновременно работающими процессами применяются средства межпроцессного взаимодействия (Interprocess Communication - IPC).
Выделяются три уровня средств IPC:
Средства локального уровня IPC привязаны к процессору и возможны только в пределах компьютера. К этому виду IPC принадлежат практически все основные механизмы IPC UNIX, а именно, каналы, разделяемая память и очереди сообщений. Коммуникационное пространство этих IPC, поддерживаются только в пределах локальной системы. Из-за этих ограничений для них могут реализовываться более простые и более быстрые интерфейсы.
Удаленные IPC предоставляют механизмы, которые обеспечивают взаимодействие как в пределах одного процессора, так и между программами на различных процессорах, соединенных через сеть. Сюда относятся удаленные вызовы процедур (Remote Procedure Calls - RPC), сокеты Unix, а также TLI (Transport Layer Interface - интерфейс транспортного уровня) фирмы Sun.
Под высокоуровневыми IPC обычно подразумеваются пакеты программного обеспечения, которые реализуют промежуточный слой между системной платформой и приложением. Эти пакеты предназначены для переноса уже испытанных протоколов коммуникации приложения на более новую архитектуру.
Простые межпроцессные коммуникации можно организовать с помощью сигналов и каналов. Более сложными средствами IPC являются очереди сообщений, семафоры и разделяемые области памяти.
Наряду с обеспечением взаимодействия процессов средства IPC призваны решать проблемы, возникающие при организации параллельных вычислений. Сюда относятся:
Канал (pipe) представляет собой средство связи стандартного вывода одного процесса со стандартным вводом другого. Каналы старейший из инструментов IPC, существующий приблизительно со времени появления самых ранних версий оперативной системы UNIX.
Для реализации IPC возможно использование полудуплексных и/или именованных каналов (FIFO).
Когда процесс создает канал, ядро устанавливает два файловых дескриптора для пользования этим каналом. Один такой дескриптор используется, чтобы открыть путь ввода в канал (запись), в то время как другой применяется для получения данных из канала (чтение). В этом смысле, канал мало применим практически, так как создающий его процесс может использовать канал только для взаимодействия с самим собой. Рассмотрим следующее изображение процесса и ядра после создания канала:
in <----- Process Kernel out ----->
Из этого рисунка легко увидеть, как файловые дескрипторы связаны друг с другом. Если процесс посылает данные через канал (fd0), он имеет возможность получить эту информацию из fd1. Однако этот простенький рисунок отображает и более глобальную задачу. Хотя канал первоначально связывает процесс с самим собой, данные, идущие через канал, проходят через ядро. В частности, в Linux каналы внутренне представлены корректным inode. Конечно, этот inode существует в пределах самого ядра, а не в какой-либо физической файловой системе. Эта особенность откроет нам некоторые привелекательные возможности для ввода/вывода, как мы увидим немного позже.
Зачем же нам неприятности с созданием канала, если мы всего-навсего собираемся поговорить сами с собой? На самом деле, процесс, создающий канал, обычно порождает дочерний процесс. Как только дочерний процесс унаследует какой-нибудь открытый файловый дескриптор от родителя, мы получаем базу для мультипроцессовой коммуникации (между родителем и потомком). Рассмотрим эту измененную версию нашего рисунка:
in <----- -----> in Parent Process Kernel Child Process out -----> <----- out
Теперь мы видим, что оба процесса имеют доступ к файловым дескрипторам, которые основывают канал. На этой стадии должно быть принято критическое решение. В каком направлении мы хотим запустить данные? Потомок посылает информацию к родителю или наоборот? Два процесса взаимно согласовываются и "закрывают" неиспользуемый конец канала. Пусть потомок выполняет несколько действий и посылает информацию родителю обратно через канал. Наш новый рисунок выглядел бы примерно так:
in <----- in Parent Process Kernel Child Process out <----- out
Конструкция канала теперь полная. Чтобы использовать его, можно применять системные вызовы, подобные тем, которые нужны для ввода/вывода в файл или из файла на низком уровне (вспомним, что в действительности каналы внутренне представлены как корректный inode). Это означает, что для чтения из канала можно использовать вызов read(), а для записи - write().
Примечания:
Именованные каналы во многом работают так же, как и обычные каналы, но все же имеют несколько заметных отличий.
Операции ввода/вывода с FIFO, по существу, такие же, как для обычных каналов, за одним исключением. Чтобы физически открыть проход к каналу, должен быть использован системный вызов "open" или библиотечная функция. С полудуплексными каналами это невозможно, поскольку канал находится в ядре, а не в физической файловой системе.
Если FIFO открыт для чтения, процесс его блокирует до тех пор, пока какой-нибудь другой процесс не откроет FIFO для записи.
Сигналы являются программными прерываниями, которые посылаются процессу, когда случается некоторое событие. Сигналы могут возникать синхронно с ошибкой в приложении, например SIGFPE (ошибка вычислений с плавающей запятой) и SIGSEGV (ошибка адресации), но большинство сигналов является асинхронными. Сигналы могут посылаться процессу, если система обнаруживает программное событие, например, когда пользователь дает команду прервать или остановить выполнение, или получен сигнал на завершение от другого процесса. Сигналы могут прийти непосредственно от ядра ОС, когда возникает сбой аппаратных средств ЭВМ. Система определяет набор сигналов, которые могут быть отправлены процессу. При этом каждый сигнал имеет целочисленное значение и приводит к строго определенным действиям.
Механизм передачи сигналов состоит из следующих частей:
Отдельные сигналы подразделяются на три класса:
Как только сигнал приходит, он отмечается записью в таблице процессов. Если этот сигнал предназначен для процесса, то по таблице указателей функций в структуре описания процесса выясняется, как нужно реагировать на этот сигнал. При этом номер сигнала служит индексом таблицы.
Известно три варианта реакции на сигналы:
Чтобы реагировать на разные сигналы, необходимо знать концепции их обработки. Процесс должен организовать так называемый обработчик сигнала в случае его прихода.
Очереди сообщений представляют собой связный список в адресном пространстве ядра. Сообщения могут посылаться в очередь по порядку и доставаться из очереди несколькими разными путями. Каждая очередь сообщений однозначно определена идентификатором IPC.
Очереди сообщений как средство межпроцессной связи позволяют процессам взаимодействовать, обмениваясь данными. Данные передаются между процессами дискретными порциями, называемыми сообщениями. Процессы, использующие этот тип межпроцессной связи, могут выполнять две операции: послать или принять сообщение.
Процесс, прежде чем послать или принять какое-либо сообщение, должен запросить систему породить программные механизмы, необходимые для обработки данных операций. Процесс делает это при помощи системного вызова msgget. Обратившись к нему, процесс становится владельцем или создателем некоторого средства обмена сообщениями; кроме того, процесс специфицирует первоначальные права на выполнение операций для всех процессов, включая себя. Впоследствии владелец может уступить право собственности или изменить права на операции при помощи системного вызова msgctl, однако на протяжении всего времени существования определенного средства обмена сообщениями его создатель остается создателем. Другие процессы, обладающие соответствующими правами для выполнения различных управляющих действий, также могут использовать системный вызов msgctl.
Процессы, имеющие права на операции и пытающиеся послать или принять сообщение, могут приостанавливаться, если выполнение операции не было успешным. В частности это означает, что процесс, пытающийся послать сообщение, может ожидать, пока процесс-получатель не будет готов; и наоборот, получатель может ждать отправителя. Если указано, что процесс в таких ситуациях должен приостанавливаться, говорят о выполнении над сообщением ``операции с блокировкой''. Если приостанавливать процесс нельзя, говорят, что над сообщением выполняется ''операция без блокировки''.
Процесс, выполняющий операцию с блокировкой, может быть приостановлен до тех пор, пока не будет удовлетворено одно из условий:
Системные вызовы позволяют процессам пользоваться этими возможностями обмена сообщениями. Вызывающий процесс передает системному вызову аргументы, а системный вызов выполняет (успешно или нет) свою функцию. Если системный вызов завершается успешно, он выполняет то, что от него требуется, и возвращает некоторую содержательную информацию. В противном случае процессу возвращается значение -1, известное как признак ошибки, а внешней переменной errno присваивается код ошибки.
Семафоры являются одним из классических примитивов синхронизации. Семафор (semaphore) - это целая переменная, значение которой можно опрашивать и менять только при помощи неделимых (атомарных) операций.
Двоичный семафор может принимать только значения 0 или 1. Считающий семафор может принимать целые неотрицательные значения.
В приложениях как правило требуется использование более одного семафора, ОС должна представлять возможность создавать множества семафоров.
Над каждым семафором, принадлежащим некоторому множеству, можно выполнить любую из трех операций:
Для выполнения первых двух операций у процесса должно быть право на изменение, для выполнения третьей достаточно права на чтение. Чтобы увеличить значение семафора, системному вызову semop следует передать требуемое число. Чтобы уменьшить значение семафора, нужно передать требуемое число, взятое с обратным знаком; если результат получается отрицательным, операция не может быть успешно выполнена. Для третьей операции нужно передать 0; если текущее значение семафора отлично от нуля, операция не может быть успешно выполнена.
Разделяемая память может быть наилучшим образом описана как отображение участка (сегмента) памяти, которая будет разделена между более чем одним процессом. Это гораздо более быстрая форма IPC, потому что здесь нет никакого посредничества (т.е. каналов, очередей сообщений и т.п.). Вместо этого, информация отображается непосредственно из сегмента памяти в адресное пространство вызывающего процесса. Сегмент может быть создан одним процессом и впоследствии использован для чтения/записи любым количеством процессов.
Сокеты обеспечивают двухстороннюю связь типа ``точка-точка'' между двумя процессами. Они являются основными компонентами межсистемной и межпроцессной связи. Каждый сокет представляет собой конечную точку связи, с которой может быть совмещено некоторое имя. Он имеет определенный тип, и один процесс или несколько, связанных с ним процессов.
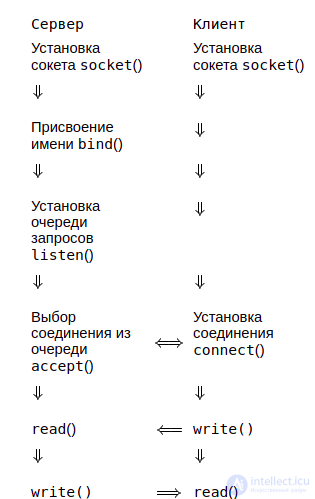
Рис.1 Схема обмена через сокет
Сокеты находятся в областях связи (доменах). Домен сокета - это абстракция, которая определяет структуру адресации и набор протоколов. Сокеты могут соединяться только с сокетами в том же домене. Всего выделено 23 класса сокетов (см. файл
Класс сокетов UNIX обеспечивает их адресное пространство для отдельной вычислительной системы. Сокеты области UNIX называются именами файлов UNIX. Сокеты также можно использовать, чтобы организовать связь между процессами на различных системах. Адресное пространство сокетов между связанными системами называют доменом Интернета. Коммуникации домена Интернета используют стек протоколов TCP/IP.
Типы сокетов определяют особенности связи, доступные приложению. Процессы взаимодействуют только через сокеты одного и того же типа.
Поточный - обеспечивает двухсторонний, последовательный, надежный, и недублированный поток данных без определенных границ. Тип сокета - SOCK_STREAM, в домене Интернета он использует протокол TCP.
Датаграммный - поддерживает двухсторонний поток сообщений. Приложение, использующее такие сокеты, может получать сообщения в порядке, отличном от последовательности, в которой эти сообщения посылались. Тип сокета - SOCK_DGRAM, в домене Интернета он использует протокол UDP.
Сокет последовательных пакетов - обеспечивает двухсторонний, последовательный, надежный обмен датаграммами фиксированной максимальной длины. Тип сокета - SOCK_SEQPACKET. Для этого типа сокета не существует специального протокола.
Простой сокет - обеспечивает доступ к основным протоколам связи.
Все сокеты обычно ориентированы на применение датаграмм, но их точные характеристики зависят от интерфейса, обеспечиваемого протоколом. Обмен между сокетами происходит по схеме, приведенной на рис. 1.
Большинство ОСРВ выполняет планирование задач, руководствуясь следующей схемой . Каждой задаче в приложении ставится в соответствие некоторый приоритет. Чем больше приоритет, тем выше должна быть реактивность задачи. Высокая реактивность достигается путем реализации подходаприоритетного вытесняющего планирования (preemptive priority scheduling), суть которого заключается в том, что планировщику разрешается останавливать выполнение любой задачи в произвольный момент времени, если установлено, что другая задача должна быть запущена незамедлительно.
Описанная схема работает по следующему правилу: если две задачи одновременно готовы к запуску, но первая обладает высоким приоритетом, а вторая — низким, то планировщик отдаст предпочтение первой. Вторая задача будет запущена только после того, как завершит свою работу первая.
Возможна ситуация, когда задача с низким приоритетом уже запущена, а планировщик получает сообщение, что другая задача с более высоким приоритетом готова к запуску. Причиной этому может послужить какое-либо внешнее воздействие (прерывание от оборудования), как, например, изменение состояния переключателя устройства, управляемого ОСРВ. В такой ситуации планировщик задач поведет себя согласно подходу приоритетного вытесняющего планирования следующим образом. Задаче с низким приоритетом будет позволено выполнить до конца текущую машинную команду (но не команду, описанную в исходнике программы языком высокого уровня), после чего выполнение задачи приостанавливается . Далее запускается задача с высоким приоритетом. После того, как она прорабатывает, планировщик запускает прерванную первую задачу с машинной команды, следующей за последней выполненной.
Каждый раз, когда планировщик задач получает сигнал о наступлении некоторого внешнего события (триггер), причина которого может быть как аппаратная, так и программная, он действует по следующему алгоритму :
Эти пять шагов алгоритма также называются переключением задач.
В обычных ОСРВ задача может находиться в 3-х возможных состояниях :
Большую часть времени основная масса задач заблокирована. Только одна задача может выполняться на центральном процессоре в текущий момент времени. В примитивных ОСРВ список готовых к исполнению задач, как правило, очень короткий, он может состоять не более чем из двух-трех наименований.
Основная функция администратора ОСРВ заключается в составлении такого планировщика задач.
Если в списке готовых к выполнению задач последних имеется не больше двух-трех, то предполагается, что все задачи расположены в оптимальном порядке. Если же случаются такие ситуации, что число задач в списке превышает допустимый лимит, то задачи сортируются в порядке приоритета .
В настоящее время для решения задачи эффективного планирования в ОСРВ наиболее интенсивно развиваются два подхода[10]:
При больших загрузках системы EDF более эффективен, нежели RMS.
Следующим проблемам выделения памяти в ОСРВ уделяется больше внимания, нежели в операционных системах общего назначения.
Во-первых, скорости выделения памяти. Стандартная схема выделения памяти предусматривает сканирование списка неопределенной длины для нахождения свободной области памяти заданного размера, а это неприемлемо, так как в ОСРВ выделение памяти должно происходить за фиксированное время.
Во-вторых, память может стать фрагментированной в случае разделения свободных ее участков уже запущенными процессами. Это может привести к остановке программы из-за ее неспособности задействовать новый участок памяти. Алгоритм выделения памяти, постепенно увеличивающий фрагментированность памяти, может успешно работать на настольных системах, если те перезагружаются не реже одного раза в месяц, но является неприемлемым для встроенных систем, которые работают годами без перезагрузки.
Простой алгоритм с фиксированной длиной участков памяти очень хорошо работает в несложных встроенных системах.
Также этот алгоритм отлично функционирует и в настольных системах, особенно тогда, когда во время обработки участка памяти одним ядром следующий участок памяти обрабатывается другим ядром. Такие оптимизированные для настольных систем ОСРВ, как Unison Operating System или DSPnano RTOS, предоставляют указанную возможность.
В операционных системах реального времени , которые поддерживают ядро ЛЕОНА в настоящее время RTLinux , PikeOS , ЭКОС , RTEMS , Nucleus, ThreadX , OpenComRTOS , VxWorks (как на порт по Гайслеру исследования), LynxOS (также в порт по Гайслеру исследования), ПКА [18] (бесплатная реализация ARINC653, выпущенная под лицензией BSD) и ORK +, [19] ядро реального времени с открытым исходным кодом для высоконадежных приложений реального времени с профилем Ravenscar , Embox [20] настраиваемая ОС реального времени с открытым исходным кодом, которая позволяет использовать программное обеспечение Linux без Linux.
Для организации управления процессами необходимо учесть по меньшей мере два основных аспекта: определение уровня, на котором выполняется планирование процессов и выбор алгоритма планирования.
Одной из важных задач, которую решает ОС является проблема, связанная с определением когда и каким процессам следует выделять ресурсы процессора — задача планирования загрузки процессоров. Существуют три уровня такого планирования (рис. 4).
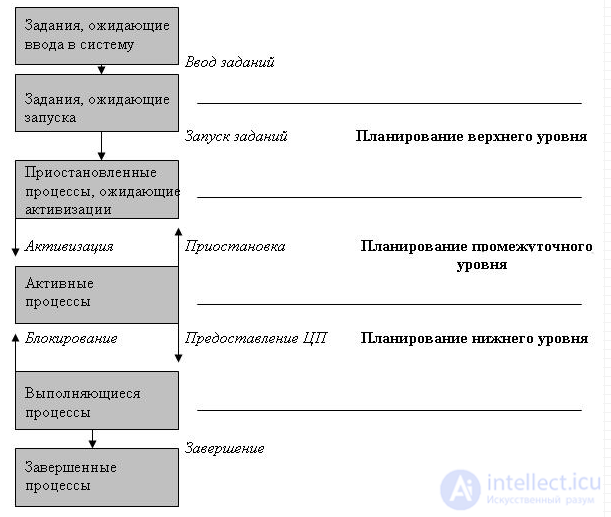
Рис. 4. Уровни планирования
Планирование на верхнем уровне или планирование заданий — это средства, которые определяют, каким заданиям будет разрешено активно конкурировать за захват ресурсов системы. Вошедшие в систему задания становятся процессами или группами процессов.
Планирование на промежуточном уровне. Средства этого уровня определяют, каким процессам будет разрешено конкурировать за захват ЦП. Планировщик этого уровня определяет, какие процессы приостанавливаются, а какие возбуждаются для обеспечения равномерной загрузки системы.
Планирование на нижнем уровне. Средства этого уровня выполняют диспетчерские функции, определяя, какому из готовых к выполнению процессов будут предоставлены ресурсы ЦП.
Дисциплина планирования должна быть:
Заметим, что многие из этих целей противоречат друг другу, что делает планирование достаточно сложной проблемой.
Для реализации перечисленных выше целей механизмы планирования должны учитывать следующие факторы:
Планирование без переключения предусматривает, что после предоставления ресурсов ЦП какому-либо процессу, отобрать ЦП у этого процесса нельзя. Если же ресурсы ЦП можно отобрать, то говорят о планировании с переключением.
При использовании планирования без переключения коротким заданиям приходится больше ждать из-за выполнения длительных заданий, с другой стороны, для всех процессов создаются как бы равные условия, а времена ответа здесь более предсказуемы.
Планирование с переключением необходимо в системах, где процессы высокого приоритета требуют немедленного внимания, например в интерактивных системах разделения времени этот способ планирования позволяет гарантировать приемлемые времена ответа.
Система может присваивать процессам приоритеты автоматически или они могут назначаться извне. Приоритеты могут быть заслуженными или купленными. Они могут быть статическими или динамическими. Они могут назначаться по какому-то рациональному принципу или присваиваться в ситуациях, когда системе просто необходимо каким-либо образом различать процессы.
Статические приоритеты не изменяются, такой механизм установки приоритетов достаточно прост и не сопряжен с большими издержками. Однако следует учитывать, что такой механизм недостаточно гибок, т.к. не реагирует на изменение окружающей ситуации.
Динамические приоритеты позволяют повысить реактивность системы, т.к. реагируют на изменения ситуации, и начальное значение приоритета процесса может быть изменено на новое, более подходящее значение.
Покупаемые приоритеты дают возможность пользователю повысить приоритет задания и получить более высокий уровень обслуживания за "дополнительную плату" (например, уменьшение кванта времени).
Принцип FIFO, «первый пришедший обслуживается первым», является наиболее простой дисциплиной планирования. ЦП предоставляется процессам в порядке их прихода в очередь готовности.
После того, как процесс получает ЦП в свое распоряжение, он выполняется до завершения, т.е. это дисциплина планирования без
продолжение следует...
Часть 1 Операционная система мягкого и жесткого реального времени и отличие от ОС общего назначения - особенности,
Часть 2 Взаимодействие между задачами и разделение ресурсов - Операционная система мягкого
Часть 3 Характеристики операционных систем реального времени - Операционная система мягкого и
В заключение, эта статья об операционная система мягкого времени подчеркивает важность того что вы тут, расширяете ваше сознание, знания, навыки и умения. Надеюсь, что теперь ты понял что такое операционная система мягкого времени, ос жесткого реального времени, операционная система реального времени, осрв и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Операционные системы и системное программировние

Комментарии