Лекция
Сразу хочу сказать, что здесь никакой воды про система производственного контроля, и только нужная информация. Для того чтобы лучше понимать что такое система производственного контроля, асу, автоматизированная система управления , настоятельно рекомендую прочитать все из категории Интеллектуальные информационные системы.
автоматизированная система управления (сокращенно асу ) — комплекс аппаратных и программных средств, а также персонала, предназначенный для управления различными процессами в рамках технологического процесса, производства, предприятия. АСУ применяются в различных отраслях промышленности, энергетике, транспорте и т. п. Термин «автоматизированная», в отличие от термина «автоматическая», подчеркивает сохранение за человеком-оператором некоторых функций, либо наиболее общего, целеполагающего характера, либо не поддающихся автоматизации. АСУ с Системой поддержки принятия решений (СППР) являются основным инструментом повышения обоснованности управленческих решений.
Важнейшая задача АСУ — повышение эффективности управления объектом на основе роста производительности труда и совершенствования методов планирования процесса управления. Различают автоматизированные системы управления объектами (технологическими процессами — АСУТП, предприятием — АСУП, отраслью — ОАСУ) и функциональные автоматизированные системы, например, проектирование плановых расчетов, материально-технического снабжения и т. д.
В общем случае, систему управления можно рассматривать в виде совокупности взаимосвязанных управленческих процессов и объектов. Обобщенной целью автоматизации управления является повышение эффективности использования потенциальных возможностей объекта управления. Таким образом, можно выделить ряд целей:
Стандарт ГОСТ 34.601-90 предусматривает следующие стадии и этапы создания автоматизированной системы:
Эскизный, технический проекты и рабочая документация — это последовательное построение все более точных проектных решений. Допускается исключать стадию «Эскизный проект» и отдельные этапы работ на всех стадиях, объединять стадии «Технический проект» и «Рабочая документация» в «Технорабочий проект», параллельно выполнять различные этапы и работы, включать дополнительные.
Данный стандарт не вполне подходит для проведения разработок в настоящее время: многие процессы отражены недостаточно, а некоторые положения устарели.
В состав АСУ входят следующие виды обеспечений: информационное, программное, техническое, организационное, математическое, правовое и лингвистическое.
Основными классификационными признаками , определяющими вид АСУ, являются:
Функции АСУ устанавливают в техническом задании на создание конкретной АСУ на основе анализа целей управления, заданных ресурсов для их достижения, ожидаемого эффекта от автоматизации и в соответствии со стандартами, распространяющимися на данный вид АСУ. Каждая функция АСУ реализуется совокупностью комплексов задач, отдельных задач и операций. Функции АСУ в общем случае включают в себя следующие элементы (действия):
Необходимый состав элементов выбирают в зависимости от вида конкретной АСУ. Функции АСУ можно объединять в подсистемы по функциональному и другим признакам.
В сфере промышленного производства с позиций управления можно выделить следующие основные классы структур систем управления: децентрализованную, централизованную, централизованную рассредоточенную и иерархическую.
Построение системы с такой структурой эффективно при автоматизации технологически независимых объектов управления по материальным, энергетическим, информационным и другим ресурсам. Такая система представляет собой совокупность нескольких независимых систем со своей информационной и алгоритмической базой.
Для выработки управляющего воздействия на каждый объект управления необходима информация о состоянии только этого объекта.
Централизованная структура осуществляет реализацию всех процессов управления объектами в едином органе управления, который осуществляет сбор и обработку информации об управляемых объектах и на основе их анализа в соответствии с критериями системы вырабатывает управляющие сигналы. Появление этого класса структур связано с увеличением числа контролируемых, регулируемых и управляемых параметров и, как правило, с территориальной рассредоточенностью объекта управления.
Достоинствами централизованной структуры являются достаточно простая реализация процессов информационного взаимодействия; принципиальная возможность оптимального управления системой в целом; достаточно легкая коррекция оперативно изменяемых входных параметров; возможность достижения максимальной эксплуатационной эффективности при минимальной избыточности технических средств управления.
Недостатки централизованной структуры следующие: необходимость высокой надежности и производительности технических средств управления для достижения приемлемого качества управления; высокая суммарная протяженность каналов связи при наличии территориальной рассредоточенности объектов управления.
Основная особенность данной структуры — сохранение принципа централизованного управления, то есть выработка управляющих воздействий на каждый объект управления на основе информации о состояниях всей совокупности объектов управления. Некоторые функциональные устройства системы управления являются общими для всех каналов системы и с помощью коммутаторов подключаются к индивидуальным устройствам канала, образуя замкнутый контур управления.
Алгоритм управления в этом случае состоит из совокупности взаимосвязанных алгоритмов управления объектами, которые реализуются совокупностью взаимно связанных органов управления. В процессе функционирования каждый управляющий орган производит прием и обработку соответствующей информации, а также выдачу управляющих сигналов на подчиненные объекты. Для реализации функций управления каждый локальный орган по мере необходимости вступает в процесс информационного взаимодействия с другими органами управления. Достоинства такой структуры: снижение требований к производительности и надежности каждого центра обработки и управления без ущерба для качества управления; снижение суммарной протяженности каналов связи.
Недостатки системы в следующем: усложнение информационных процессов в системе управления из-за необходимости обмена данными между центрами обработки и управления, а также корректировка хранимой информации; избыточность технических средств, предназначенных для обработки информации; сложность синхронизации процессов обмена информацией.
С ростом числа задач управления в сложных системах значительно увеличивается объем переработанной информации и повышается сложность алгоритмов управления. Об этом говорит сайт https://intellect.icu . В результате осуществлять управление централизованно невозможно, так как имеет место несоответствие между сложностью управляемого объекта и способностью любого управляющего органа получать и перерабатывать информацию.
Кроме того, в таких системах можно выделить следующие группы задач, каждая из которых характеризуется соответствующими требованиями по времени реакции на события, происходящие в управляемом процессе:
Очевидно, что иерархия задач управления приводит к необходимости создания иерархической системы средств управления. Такое разделение, позволяя справиться с информационными трудностями для каждого местного органа управления, порождает необходимость согласования принимаемых этими органами решений, то есть создания над ними нового управляющего органа. На каждом уровне должно быть обеспечено максимальное соответствие характеристик технических средств заданному классу задач.
Кроме того, многие производственные системы имеют собственную иерархию, возникающую под влиянием объективных тенденций научно-технического прогресса, концентрации и специализации производства, способствующих повышению эффективности общественного производства. Чаще всего иерархическая структура объекта управления не совпадает с иерархией системы управления. Следовательно, по мере роста сложности систем выстраивается иерархическая пирамида управления. Управляемые процессы в сложном объекте управления требуют своевременного формирования правильных решений, которые приводили бы к поставленным целям, принимались бы своевременно, были бы взаимно согласованы. Каждое такое решение требует постановки соответствующей задачи управления. Их совокупность образует иерархию задач управления, которая в ряде случаев значительно сложнее иерархии объекта управления.
Примеры:
Примеры:
Ветеран создания и внедрения АСУ Владимир Петрович Исаев в статье , опубликованной в 2009 году в 5-м номере журнала «Открытые системы» и в статье , подчеркивает:
«Уже первые результаты, достигнутые с помощью ЭВМ, показали, что возможности ВТ значительно более широки, чем проведение просто сложных и трудоемких расчетов и простираются значительно дальше в сферу ее „неарифметического использования“
— А.И. Китов «Электронные цифровые машины». 1956
Эта статья в значительной степени была посвящена вопросам использования ЭВМ в экономике, автоматизации производственных процессов и для решения других интеллектуальных задач. Я полагаю, что эта теоретическая научная монография и была предтечей отечественных АСУ и фиксирую время этого события — 1956-й год. Далее в следующей своей работе „Электронные вычислительные машины“, появившейся в 1958-м году в издательстве „Знание“, А. И. Китов подробно излагает перспективы комплексной автоматизации информационной работы и процессов административного управления, включая управление производством и решение экономических задач. Эта концепция (парадигма) и ее публичное изложение было в то время актом гражданского мужества, так как в официальных кругах еще господствовала формулировка „Математика в экономике есть средство апологетики капитализма“. Исходя из вышесказанного на основе своих знаний и более чем 40-летнего опыта участия в разработках ВТ и АСУ, считаю логичным сделать вывод: „Анатолий Иванович Китов является автором понятия и идеологом отечественных АСУ“. Итак, если говорить образно что „в начале было Слово“, то это Слово было сказано А. И. Китовым ровно 50 лет назад. Поэтому, мы вправе сегодня, в декабре 2008-го года, говорить о двойном юбилее: 60-летие отечественной ВТ и информатики, а также о 50-летии отечественных АСУ».
С середины 1960-х годов в СССР началось массовое внедрение промышленных АСУ, приведшее практически к созданию индустрии АСУ, неформальным научным руководителем которой до 1982 года был лидер киевских информатиков В. М. Глушков. В стране в каждой промышленной отрасли Правительством СССР были созданы головные НИИ по созданию и внедрению АСУ, действовал Совет Главных конструкторов АСУ. Определенную известность получила новосибирская школа информатиков (СО АН СССР) под руководством Г. И. Марчука. В середине 1960-х годов в СССР активно велись работы по созданию Отраслевой автоматизированной системы управления Министерства радиопромышленности СССР (А. И. Китов — Главный конструктор ОАСУ МРП, В. М. Глушков — Научный руководитель ОАСУ МРП). Эта ОАСУ была признана Правительством Советского Союза в качестве типовой отраслевой АСУ для всех девяти оборонных министерств СССР.
Основополагающие базовые принципы создания отраслевых и промышленных автоматизированных систем управления (ОАСУ и АСУП) и опыт создания управленческих и экономических информационных систем на базе использования ЭВМ и экономико-математических методов были изложены в монографиях А. И. Китова «Программирование информационно-логических задач» (1967), «Программирование экономических и управленческих задач» (1971) и В. М. Глушкова «Введение в АСУ» (1972) и «Основы безбумажной информатики» (1982).
Активно развивались АСУ в республиках Советского Союза. В первую очередь, на Украине, в Армении, в Азербайджане, в Узбекистане и в других республиках, где трудились в этой области большие коллективы ученых и специалистов. Из украинских информатиков, помимо В. М. Глушкова, с середины 1960-х годов и вплоть до своей кончины 30.01.1982 г. неформального лидера советских АСУ, следует выделить ученого в области АСУ д.т. н., профессора, члена АН УССР В. И. Скурихина. В Азербайджане успешно работал над созданием АСУ для нефтяного сектора экономики д.т. н., профессор, член-корреспондент АН Азербайджана С. К. Керимов (ученик А. И. Китова). В Белоруссии это доктор экономических наук, профессор, член-корреспондент Национальной академии наук Белоруссии Н. И. Ведута (1913—1998) . В 1962—1967 гг. в должности директора Центрального научно-исследовательского института технического управления (ЦНИИТУ), являясь также членом коллегии Министерства приборостроения СССР, он руководил внедрением ряда первых в стране АСУП на машиностроительных предприятиях Минприбора.
Простейшие системы управления основаны на небольших дискретных контроллерах с одним контуром управления каждый. Обычно они монтируются на панели, что обеспечивает прямой обзор передней панели и предоставляет средства ручного вмешательства оператора, либо для ручного управления процессом, либо для изменения контрольных уставок. Первоначально это были пневматические контроллеры, некоторые из которых все еще используются, но сейчас почти все они электронные.
Можно создать довольно сложные системы с сетями из этих контроллеров, обменивающихся данными с использованием стандартных протоколов. Сеть позволяет использовать локальные или удаленные интерфейсы оператора SCADA и обеспечивает каскадирование и блокировку контроллеров. Однако по мере увеличения количества контуров управления в конструкции системы наступает момент, когда использование программируемого логического контроллера (ПЛК) или распределенной системы управления (DCS) становится более управляемым или экономичным.
Распределенная система управления (DCS) - это цифровая система управления технологическим процессом или установкой, в которой функции контроллера и модули полевого подключения распределены по всей системе. По мере роста числа контуров управления DCS становится более рентабельной, чем дискретные контроллеры. Кроме того, DCS обеспечивает контроль и управление крупными производственными процессами. В РСУ иерархия контроллеров соединена сетями связи , что позволяет централизовать диспетчерские и локальный мониторинг и управление на предприятии.
DCS позволяет легко конфигурировать средства управления производством, такие как каскадные контуры и блокировки, [ требуется дополнительное объяснение ] и простой интерфейс с другими компьютерными системами, такими как управление производством . Он также обеспечивает более сложную обработку аварийных сигналов, вводит автоматическую регистрацию событий, устраняет необходимость в физических записях, таких как регистраторы диаграмм, и позволяет объединить оборудование управления в сеть и тем самым размещать его локально по отношению к управляемому оборудованию, чтобы уменьшить количество кабелей.
DCS обычно использует специально разработанные процессоры в качестве контроллеров и использует собственные межсоединения или стандартные протоколы для связи. Модули ввода и вывода образуют периферийные компоненты системы.
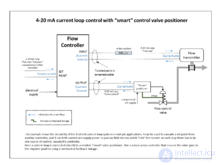
Процессоры получают информацию от модулей ввода, обрабатывают информацию и решают управляющие действия, которые должны выполняться модулями вывода. Модули ввода получают информацию от измерительных приборов в процессе (или полевых условиях), а модули вывода передают инструкции конечным элементам управления, таким как регулирующие клапаны .
Полевые входы и выходы могут быть либо непрерывным изменение аналоговых сигналов например , токовой петли или 2 сигналов состояния , которые переключают либо на или выключен , например, контактах реле или полупроводниковый переключатель.
Распределенные системы управления обычно могут также поддерживать Foundation Fieldbus , PROFIBUS , HART , Modbus и другие шины цифровой связи, которые передают не только входные и выходные сигналы, но и расширенные сообщения, такие как диагностика ошибок и сигналы состояния.
Диспетчерский контроль и сбор данных (SCADA) - это архитектура системы управления, которая использует компьютеры, сетевую передачу данных и графические пользовательские интерфейсы для высокоуровневого диспетчерского управления процессами. Интерфейсы оператора, обеспечивающие мониторинг и выдачу технологических команд, таких как изменение уставки контроллера, обрабатываются через компьютерную систему диспетчерского управления SCADA. Однако логика управления в реальном времени или расчеты контроллера выполняются сетевыми модулями, которые подключаются к другим периферийным устройствам, таким как программируемые логические контроллеры и дискретные контроллеры PID, которые взаимодействуют с технологическим оборудованием или оборудованием.
Концепция SCADA была разработана как универсальное средство удаленного доступа к множеству локальных модулей управления, которые могут быть от разных производителей, обеспечивая доступ через стандартные протоколы автоматизации . На практике большие системы SCADA выросли и стали очень похожи на распределенные системы управления по функциям, но с использованием нескольких средств взаимодействия с установкой. Они могут управлять крупномасштабными процессами, которые могут включать в себя несколько сайтов, и работать на больших расстояниях. Это широко используемая архитектура промышленных систем управления, однако есть опасения, что системы SCADA уязвимы для кибервойны или кибертеррористических атак.
Программное обеспечение SCADA работает на супервизорном уровне, так как управляющие действия выполняются автоматически RTU или PLC. Функции управления SCADA обычно ограничиваются вмешательством на базовом или контролирующем уровне. Контур управления с обратной связью напрямую управляется RTU или PLC, но программное обеспечение SCADA контролирует общую производительность контура. Например, ПЛК может управлять потоком охлаждающей воды через часть промышленного процесса до заданного уровня, но системное программное обеспечение SCADA позволит операторам изменять заданные значения для потока. SCADA также позволяет отображать и записывать аварийные ситуации, такие как потеря потока или высокая температура.
ПЛК могут варьироваться от небольших модульных устройств с десятками входов и выходов (I / O) в корпусе, интегрированном с процессором, до больших модульных устройств, монтируемых в стойку, с количеством входов / выходов, насчитывающими тысячи, которые часто объединены в сеть с другими Системы PLC и SCADA. Они могут быть разработаны для различных конфигураций цифровых и аналоговых входов и выходов, расширенного температурного диапазона, устойчивости к электрическим шумам и устойчивости к вибрации и ударам. Программы для управления работой машины обычно хранятся в энергонезависимой памяти с резервным питанием от батарей .
Управление технологическими процессами на крупных промышленных предприятиях прошло много этапов. Первоначально управление осуществлялось с локальных панелей технологической установки. Однако для этого требовался персонал, который занимался рассредоточенными панелями, и не было общего обзора процесса. Следующим логическим шагом стала передача всех заводских измерений в центральную диспетчерскую с постоянно обслуживаемым персоналом. Часто контроллеры находились за панелями диспетчерской, и все автоматические и ручные управляющие сигналы индивидуально передавались обратно на установку в виде пневматических или электрических сигналов. По сути, это была централизация всех локализованных панелей с преимуществами уменьшения потребности в людях и консолидированного обзора процесса.
Однако, обеспечивая централизованное управление, эта компоновка была негибкой, поскольку каждый контур управления имел собственное аппаратное обеспечение контроллера, поэтому изменения в системе требовали перенастройки сигналов путем перенастройки трубопроводов или переподключения. Также требовалось постоянное движение оператора в большой диспетчерской, чтобы контролировать весь процесс. С появлением электронных процессоров, высокоскоростных сетей электронной сигнализации и электронных графических дисплеев стало возможным заменить эти дискретные контроллеры компьютерными алгоритмами, размещенными в сети стоек ввода / вывода с собственными процессорами управления. Они могут быть распределены по предприятию и сообщаться с графическими дисплеями в диспетчерской. Реализована концепция распределенного управления .
Внедрение распределенного управления позволило гибко соединять и переконфигурировать средства управления производством, такие как каскадные петли и блокировки, а также взаимодействие с другими производственными компьютерными системами. Он обеспечил сложную обработку аварийных сигналов, ввел автоматическую регистрацию событий, устранил необходимость в физических записях, таких как регистраторы диаграмм, позволил объединить стойки управления в сеть и, таким образом, разместить их локально на заводе, чтобы сократить количество прокладок кабелей, и обеспечил высокоуровневые обзоры состояния завода и уровни производства. Для больших систем управления было придумано общее коммерческое название распределенная система управления (DCS) для обозначения проприетарных модульных систем от многих производителей, которые объединяли высокоскоростные сети и полный набор дисплеев и стоек управления.
В то время как РСУ была адаптирована для удовлетворения потребностей крупных непрерывных промышленных процессов, в отраслях, где комбинаторная и последовательная логика была основным требованием, ПЛК возникла из-за необходимости замены стоек реле и таймеров, используемых для управления событиями. Старые элементы управления было сложно перенастроить и отладить, а управление ПЛК позволило организовать передачу сигналов в центральную зону управления с электронными дисплеями. ПЛК были впервые разработаны для автомобильной промышленности на производственных линиях автомобилей, где последовательная логика становилась очень сложной. Вскоре он был принят в большом количестве других событийно-ориентированных приложений, таких как печатные машины и водоочистные сооружения.
История SCADA уходит корнями в распределительные приложения, такие как трубопроводы электроэнергии, природного газа и водоснабжения, где существует потребность в сборе удаленных данных через потенциально ненадежные или прерывистые каналы с низкой пропускной способностью и высокой задержкой. В системах SCADA используется управление без обратной связи с объектами, которые географически удалены друг от друга. Система SCADA использует удаленные оконечные устройства (RTU) для отправки контрольных данных обратно в центр управления. Большинство систем RTU всегда обладали некоторой способностью осуществлять локальное управление, пока главная станция недоступна. Однако с годами системы RTU становились все более и более способными осуществлять локальное управление.
Границы между системами DCS и SCADA / PLC со временем стираются. Технические ограничения, которыми руководствовались конструкции этих различных систем, больше не являются большой проблемой. Многие платформы ПЛК теперь могут работать достаточно хорошо в качестве небольших РСУ с использованием удаленного ввода-вывода и достаточно надежны, чтобы некоторые системы SCADA фактически управляли замкнутым контуром управления на больших расстояниях. С увеличением скорости современных процессоров многие продукты DCS имеют полную линейку подсистем, подобных ПЛК, которые не предлагались при их первоначальной разработке.
В 1993 году, с выпуском стандарта IEC-1131, который позже стал IEC-61131 -3, отрасль перешла к усилению стандартизации кода с помощью многоразового аппаратно-независимого управляющего программного обеспечения. Впервые объектно-ориентированное программирование (ООП) стало возможным в промышленных системах управления. Это привело к разработке как программируемых контроллеров автоматизации (PAC), так и промышленных ПК (IPC). Это платформы, запрограммированные на пяти стандартизированных языках IEC: релейная логика, структурированный текст, функциональный блок, список инструкций и последовательная функциональная диаграмма. Они также могут быть запрограммированы на современных языках высокого уровня, таких как C или C ++. Кроме того, они принимают модели, разработанные в аналитических инструментах, таких как MATLAB и Simulink.. В отличие от традиционных ПЛК, которые используют проприетарные операционные системы, IPC используют Windows IoT . IPC обладают преимуществом мощных многоядерных процессоров с гораздо более низкими затратами на оборудование, чем традиционные ПЛК, и хорошо подходят для различных форм-факторов, таких как монтаж на DIN-рейку, в сочетании с сенсорным экраном в качестве панельного ПК или в качестве встроенного ПК. Новые аппаратные платформы и технологии внесли значительный вклад в эволюцию систем DCS и SCADA, еще больше размывая границы и меняя определения.
Статью про система производственного контроля я написал специально для тебя. Если ты хотел бы внести свой вклад в развитие теории и практики, ты можешь написать коммент или статью отправив на мою почту в разделе контакты. Этим ты поможешь другим читателям, ведь ты хочешь это сделать? Надеюсь, что теперь ты понял что такое система производственного контроля, асу, автоматизированная система управления и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Интеллектуальные информационные системы





Комментарии