Лекция
Привет, Вы узнаете о том , что такое шумовая радиолокация, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое шумовая радиолокация , настоятельно рекомендую прочитать все из категории Устройства СВЧ и антенны.
шумовая радиолокация — это радиолокационная технология, в которой в качестве зондирующего сигнала используется шумовой (случайный, хаотический) непрерывный или импульсный сигнал. Обнаружение эхо-сигнала основано на оптимальном приеме и корреляции между излучаемым зондирующим сигналом принимаемым отраженным сигналом. Обычно в качестве генератора зондирующего сигнала используется непосредственно источник высокочастотного шума. Однако существует также вариант технической реализации формирования шумового сигнала путем модуляции синусоидального колебания по фазе или частоте случайным шумом. Такая технология обеспечивает меньшие боковые лепестки по дальности и более высокую среднюю излучаемую мощность (при использовании передатчиков с ограничением пиковых выбросов). Кроме того, в данном случае могут быть ослаблены требования к динамическому диапазону приемника и ширине спектра модулирующего сигнала.
Идея шумовой радиолокации известна давно и заключается в применении непрерывных или импульсных случайных (шумовых) сигналов (ШС) в качестве зондирующих и когерентном приеме их отражений. Анализ первых экспериментов по радиообнаружению металлических объектов показывает, что они были выполнены именно с помощью ШС сигналов, но при их некогерентном приеме. К. Хюльсмаер (Christian Huelsmeyer) в Германии создал и запатентовал в 1904 г. первый предшественник радара – «телеметаллодетектор» («telemobiloscope») в моностатическом исполнении. Однако еще в 1897 г. А. С. Попов в России испытал установку с аналогичной функцией, но в бистатическом варианте . В обоих случаях авторы использовали искровые разрядники в качестве передатчиков шумовых импульсов и когерер – как детектор, который осуществлял прием отраженных шумовых импульсов. По-видимому, первые работы по разработке измерителей расстояний, базирующихся на когерентном приеме ШС, были опубликованы Р. Об этом говорит сайт https://intellect.icu . Боуретом (R. Bourret) в 1957 г. и Б. Хортоном (B. M. Horton) в 1959 г. . При обеспечении когерентного приема радиолокационных отражений ШС можно отнести к наиболее эффективным зондирующим сигналам, который позволяет обеспечить важные эксплуатационные характеристики радара: высокое разрешение по дальности и скорости, наилучшую помехоустойчивость, электромагнитную совместимость, скрытность работы, помехозащищенность и др. Разработчиками радарных систем неоднократно предпринимались попытки создания эффективных шумовых радаров с когерентной обработкой отраженных сигналов во многих исследовательских центрах мира, в том числе и в ИРЭ НАН Украины. Однако эти исследования не были успешными, в основном, по следующим причинам: отсутствие эффективных источников ШС и управляемых широкополосных линий задержек, необходимых для когерентной обработки отраженных случайных сигналов, т. е. широкополосных корреляционных приемников. Таким образом, к ключевым задачам, решение которых необходимо для успешного развития современной шумовой радиолокации, следует отнести: создание эффективных источников шумовых радиосигналов и широкополосных корреляционных приемников для когерентной обработки таких сигналов. Разработанные нами методы хаотизации электронных систем и цифроаналоговой обработки случайных сигналов позволили создать ряд генераторов хаотических колебаний и широкополосных корреляторов, на основе которых разработаны и испытаны исследовательские образцы современных шумовых радаров мм и микроволнового диапазонов, и тем самым, заложить основы современной шумовой радарной технологии [5-11]. Шумовая радарная технология включает три основных составляющих:
– разработка и исследование генераторов ШС на основе методов хаотизации колебаний в электронных системах микроволнового и мм диапазонов;
– разработка методов цифровой обработки случайных сигналов и создание широкополосных цифро-аналоговых корреляторов; –
разработка шумовых радаров и зондирующих систем различного назначения.
Кроме исследований в указанных направлениях нами проводится изучение автодинного эффекта в генераторах хаотических колебаний и возможности его применения в радиолокации, а также исследование явления интерференции декоррелированных сигналов, в частности, спектральной интерферометрии, и построение на его основе прецизионных измерительных систем
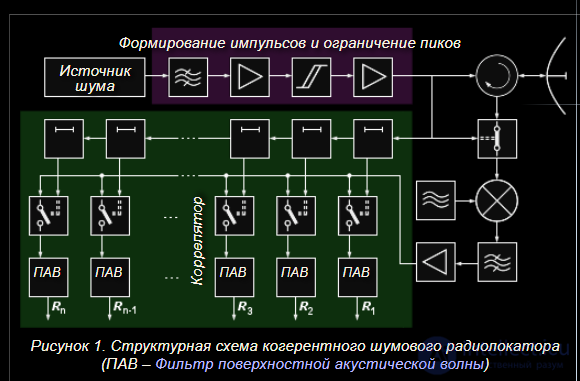
Рисунок 1. Структурная схема когерентного шумового радиолокатора
(ПАВ – Фильтр поверхностной акустической волны)
С применением технологии шумовой радиолокации могут быть значительно усовершенствованы радиолокационные системы военного назначения, в частности, за счет повышения скрытности их работы (Stealth-радиолокатор). Речь идет об улучшении характеристик радиолокаторов военного назначения, а именно достижении наилучших значений низкой вероятности их перехвата и электромагнитной совместимости, что требуется для скрытной работы в условиях противодействия противника.
Использование шумовой радиолокации требует наличия в составе радиолокатора составных частей со специфическими свойствами, а именно:
Системы определения расстояний, в которых случайный шум используется в качестве модулирующего сигнала, построены на основе измерения корреляции модуляции излучаемого и модуляции принятого сигналов. Спектр модулирующего сигнала определяет то, каким образом эта корреляция и, следовательно, выходной сигнал связаны с расстоянием до отражающего объекта. На практике, каждому возможному дискретному значению расстояния до цели должен соответствовать свой отвод линии задержки. Реализуемость таких фильтров ограничивает дальность действия шумового радиолокатора. Теоретически, можно использовать амплитудную или частотную модуляцию, однако, частотная модуляция имеет некоторые преимущества в помехоустойчивости (подавлении случайных побочных сигналов, возникающих в системе). Получающаяся в результате система похожа на существующие бортовые радиовысотомеры, однако свободна от неоднозначности измерения, присущей как импульсным радиолокаторам, так и радиолокаторам непрерывного излучения с частотной модуляцией. Это также позволяет избежать систематических ошибок измерения. Система способна измерять расстояния вплоть до нескольких футов, что делает ее подходящей для использования в качестве высотомера в системах «слепой» посадки.
Исследование, описанное в статье про шумовая радиолокация, подчеркивает ее значимость в современном мире. Надеюсь, что теперь ты понял что такое шумовая радиолокация и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Устройства СВЧ и антенны
Из статьи мы узнали кратко, но содержательно про шумовая радиолокация
Комментарии