Лекция
Привет, Вы узнаете о том , что такое непрерывно-стохастические модели, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое непрерывно-стохастические модели, q-схемы, сетевые модели, n-схемы, комбинированные модели, a-схемы , настоятельно рекомендую прочитать все из категории Моделирование информационных систем.
Особенности непрерывно-стохастического подхода рассмотрим на
примере использования в качестве типовых математических схем систем массового обслуживания (англ. queuing system), которые будем называть Qсхемами. Системы массового обслуживания представляют собой класс математических схем, разработанных в теории массового обслуживания и различных
приложениях для формализации процессов функционирования систем, которые
по своей сути являются процессами обслуживания.
В качестве процесса обслуживания могут быть представлены различные
по своей физической природе процессы функционирования экономических,
производственных, технических и других систем, например потоки поставок
продукции некоторому предприятию, потоки деталей и комплектующих изделий на сборочном конвейере цеха, заявки на обработку информации ЭВМ от
удаленных терминалов и т. д. При этом характерным для работы таких объектов является случайное появление заявок (требований) на обслуживание и завершение обслуживания в случайные моменты времени, т. е. стохастический
характер процесса их функционирования. Остановимся на основных понятиях
массового обслуживания, необходимых для использования Q-схем, как при
аналитическом, так и при имитационном моделировании.
В любом элементарном акте обслуживания можно выделить две основные составляющие: ожидание обслуживания заявкой и собственно обслуживание заявки. Это можно изобразить в виде некоторого i-го прибора
обслуживания Пi (рис. 5), состоящего
из накопителя заявок Hi
, в котором
может одновременно находиться
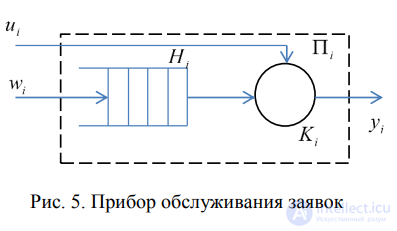
Рис. 5. Прибор обслуживания заявок
H
i Li
l 0,
заявок, где
H
Li — емкость i -го накопителя, и канала обслуживания заявок (или просто канала) Ki
. На каждый элемент прибора обслуживания Пi поступают потоки событий: в накопитель Hi — поток заявок wi на канал Ki — поток обслуживания.
Потоком событий называется последовательность событий, происходящих одно за другим в какие-то случайные моменты времени. Различают потоки однородных и неоднородных событий. Поток событий называется однородным, если он характеризуется только моментами поступления этих событий
(вызывающими моментами) и задается последовательностью
t
n 0 t
1 t
2
... t
n ...
, где
n
t — момент наступления n-го события — неотрицательное вещественное число. Однородный поток событий также может быть
задан в виде последовательности промежутков времени между n-м и (n—1)-м
событиями
n , которая однозначно связана с последовательностью вызывающих моментов
t
n
, где
n
t
n t
n1
, n 1, t
0 0
, т. е.
1 1
t .
Потоком неоднородных событий называется последовательность
t
n
, f
n ,
где
n
t – вызывающие моменты;
n
f — набор признаков события. Например,
применительно к процессу обслуживания для неоднородного потока заявок могут быть заданы принадлежность к тому или иному источнику заявок, наличие
приоритета, возможность обслуживания тем или иным типом канала и т. п.
Обычно в приложениях при моделировании различных систем применительно к элементарному каналу обслуживания Ki можно считать, что поток заявок
wi W , т. е. интервалы времени между моментами появления заявок (вызывающие моменты) на входе Ki образует подмножество неуправляемых переменных, а поток обслуживания
ui U , т. е. интервалы времени между началом и
окончанием обслуживания заявки, образует подмножество управляемых переменных.
Заявки, обслуженные каналом Ki и заявки, покинувшие прибор Пi по
различным причинам необслуженными (например, из-за переполнения накопи-
теля Пi), образуют выходной поток
yi Y , т. е. интервалы времени между моментами выхода заявок образуют подмножество выходных переменных.
Процесс функционирования прибора обслуживания Пi можно представить как процесс изменения состояний его элементов во времени
z t i
. Переход
в новое состояние для Пi означает изменение количества заявок, которые в нем
находятся (в канале Ki и в накопителе Hi
.Таким образом, вектор состояний для
Пi имеет вид
K
i
H
i
zi z ,z , где
H
i
z — состояние накопителя Hi (
0
H
i
z – накопитель пуст,
1
H
i
z – в накопителе имеется одна заявка,
H
i
H
zi
L – накопитель полностью заполнен);
H
Li — емкость накопителя Hi
, измеряемая числом заявок, которые в нем могут поместиться;
K
i
z — состояние канала Ki (
0
K
i
z — канал свободен,
1
K
i
z —канал занят и т.д.).
В практике моделирования систем, имеющих более сложные структурные связи и алгоритмы поведения, для формализации используются не отдельные приборы обслуживания, а
q-схемы , образуемые композицией многих элементарных приборов обслуживания Пi (сети массового обслуживания). Если
каналы Ki различных приборов обслуживания соединены параллельно, то имеет
место многоканальное обслуживание (многоканальная Q-схема), а если приборы Пi и их параллельные композиции соединены последовательно, то имеет место многофазное обслуживание (многофазная Q-схема). Таким образом, для задания Q-схемы необходимо использовать оператор сопряжения R, отражающий
взаимосвязь элементов структуры (каналов и накопителей) между собой.
Связи между элементами Q-схемы изображают в виде стрелок (линий
потока, отражающих направление движения заявок). Об этом говорит сайт https://intellect.icu . Различают разомкнутые и
замкнутые Q-схемы. В разомкнутой Q-схеме выходной поток обслуженных заявок не может снова поступить на какой-либо элемент, т. е. обратная связь отсутствует, а в замкнутых Q-схемах имеются обратные связи, по которым заявки
двигаются в направлении, обратном движению вход-выход.
Неоднородность заявок, отражающая процесс в той или иной реальной
системе, учитывается с помощью введения классов приоритетов. В зависимости
от динамики приоритетов в Q-схемах различают статические и динамические
приоритеты. Статические приоритеты назначаются заранее и не зависят от состояний Q-схемы, т. е. они являются фиксированными в пределах решения конкретной задачи моделирования. Динамические приоритеты возникают при моделировании в зависимости от возникающих ситуаций. Исходя из правил выбора заявок из накопителя на обслуживание каналом Ki
, можно выделить относительные и абсолютные приоритеты. Относительный приоритет означает, что
заявка с более высоким приоритетом, поступившая в накопитель Hi ожидает
окончания обслуживания предшествующей заявки каналом Ki и только после
этого занимает канал. Абсолютный приоритет означает, что заявка с более высоким приоритетом, поступившая в накопитель Hi
, прерывает обслуживание
каналом Ki
, заявки с более низким приоритетом и сама занимает канал (при
этом вытесненная из Ki заявка может либо покинуть систему, либо может быть
снова записана на какое-то место в Нi
.
При рассмотрении алгоритмов функционирования приборов обслуживания Пi (каналов Ki и накопителей Нi) необходимо также задать набор правил, по
которым заявки покидают Нi
, и Кi. Кроме того, для заявок необходимо задать
правила, по которым они остаются в канале Ki или не допускаются до обслуживания каналом Ki т. е. правила блокировок канала. При этом различают блокировки Ki по выходу и по входу. Такие блокировки отражают наличие управляющих связей в Q-схеме, регулирующих поток заявок в зависимости от состояний Q-схемы. Весь набор возможных алгоритмов поведения заявок в Q-схеме
можно представить в виде некоторого оператора алгоритмов поведения заявок
А.
Таким образом, Q-схема, описывающая процесс функционирования системы массового обслуживания любой сложности, однозначно задается в виде
Q W,U,H,Z,R, A .
В практике моделирования объектов часто приходится решать задачи,
связанные с формализованным описанием и анализом причинно-следственных
связей в сложных системах, где одновременно параллельно протекает несколько процессов. Самым распространенным в настоящее время формализмом, описывающим структуру и взаимодействие параллельных систем и процессов, являются сети Петри (англ. Petri Nets).
Теория сетей Петри развивается в нескольких направлениях: разработка
математических основ, структурная теория сетей, различные приложения (параллельное программирование, дискретные динамические системы и т. д.).
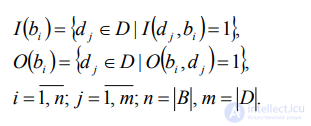
Формально сеть Петри (N-схема) задается четверкой вида
N B,D,I,O ,
где В — конечное множество символов, называемых позициями, В≠Ø; D — конечное множество символов, называемых переходами, D≠Ø, В∩D≠Ø; I—
входная функция (прямая функция инцидентности), I: В х D→{0, 1}; О — выходная функция (обратная функция инцидентности), О: D х В→ {0, 1}. Таким
образом, входная функция отображает переход
j d
в множество входных позиций
i d j b I , а выходная функция О отображает переход
j d
в множество выходных позиций
bi O d j
. Для каждого перехода
d j D
можно определить
множество входных позиций перехода
d j
I
и выходных позиций перехода
O d j
как

Аналогично, для каждого перехода
bi B
вводятся определения множества входных переходов позиции
i
I b
и множества выходных переходов позиции
Графически N-схема изображается в виде двудольного ориентированного мультиграфа, представляющего собой совокупность позиций и переходов Nсхемы (рис. 6). Как видно из этого рисунка,
граф
n-схемы имеет два типа узлов: позиции и
переходы, изображаемые 0 и 1 соответственно.
Ориентировочные дуги соединяют позиции и
переходы, причем каждая дуга направлена от
элемента одного множества (позиции или перехода) к элементу другого множества (переходу или позиции). Граф N-схемы является мультиграфом, так как он
допускает существование кратных дуг от одной вершины к другой.
Приведенное представление N-схемы может использоваться только для
отражения статики моделируемой системы (взаимосвязи событий и условий),
но не позволяет отразить в модели динамику функционирования моделируемой
системы. Для представления динамических свойств объекта вводится функция
маркировки (разметки) М: В→{0, 1, 2, ...}. Маркировка М есть присвоение
неких абстрактных объектов, называемых метками (фишками), позициям Nсхемы, причем количество меток, соответствующее каждой позиции, может меняться. При графическом задании N-схемы разметка отображается помещением
внутри вершин-позиций соответствующего числа точек (когда количество точек велико, ставят цифры).
Маркированная (размеченная) N-схема может быть описана в виде
N B,D,I,O,M .
Функционирование N-схемы отражается путем перехода от разметки к
разметке. Начальная разметка обозначается как Мо: В→ {0, 1, 2, ...}. Смена разметок происходит в результате срабатывания одного из переходов
d j D
сети.
Необходимым условием срабатывания перехода
d j
является
bi Id jMbi
1,
где
M bi — разметка позиции
i b . Переход
j d , для которого выполняется указанное условие, определяется как находящийся в состоянии готовности к срабатыванию или как возбужденный переход.
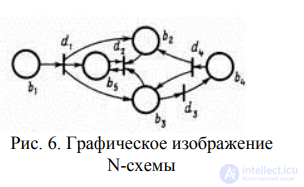
Рис. 6. Графическое изображение
N-схемы
Срабатывание перехода
j d
изменяет разметку сети
M b M b M b M bn
, ,...,
1 2
на разметку М'(b) по следующему правилу:
d j O d j M' b M b I ,
т. е. переход
j d
изымает по одной метке из каждой своей входной позиции и
добавляет по одной метке в каждую из выходных позиций. Для изображения
смены разметки М на М' применяют обозначение
d j
M M '.
Таким образом, N-схема выполняется путем запусков переходов под
управлением количества меток и их распределения в сети. Переход запускается
удалением меток из его входных позиций и образованием новых меток, помещаемых в выходные позиции. Переход может запускаться только тогда, когда
он разрешен. Переход называется разрешенным, если каждая из его входных
позиций имеет число меток, по крайней мере равное числу дуг из позиции в переход.
Важной особенностью моделей процесса функционирования систем с
использованием типовых N-схем является простота построения иерархических
конструкций модели. С одной стороны, каждая N-схема может рассматриваться
как макропереход или макропозиция модели более высокого уровня. С другой
стороны, переход, или позиция N-схемы, может детализироваться в форме отдельной подсети для более углубленного исследования процессов в моделируемой системе. Отсюда вытекает возможность эффективного использования Nсхем для моделирования параллельных и конкурирующих процессов в различных системах.
Наиболее известным общим подходом к формальному описанию процессов функционирования систем является подход, предложенный Н. П. Бусленко. Этот подход позволяет описывать поведение непрерывных и дискретных, детерминированных и стохастических систем, т.е. по сравнению с рассмотренными является обобщенным (универсальным) и базируется на понятии
агрегативной системы (от англ. aggregate system), представляющей собой формальную схему общего вида, которую будем называть А-схемой
Анализ существующих средств моделирования систем и задач, решаемых с помощью метода моделирования на ЭВМ, неизбежно приводит к выводу,
что комплексное решение проблем, возникающих в процессе создания и машинной реализации модели, возможно лишь в случае, если моделирующие системы имеют в своей основе единую формальную математическую схему, т. е.
А-схему. Такая схема должна одновременно выполнять несколько функций:
являться адекватным математическим описанием объекта моделирования, т. е. системы S;
служить основой для построения алгоритмов и программ при
машинной реализации модели M;
позволять в упрощенном варианте проводить аналитические
исследования.
При агрегативном описании сложный объект (система) разбивается на
конечное число частей (подсистем), сохраняя при этом связи, обеспечивающие
их взаимодействие. Если некоторые из полученных подсистем оказываются в
свою очередь еще достаточно сложными, то процесс их разбиения продолжается до тех пор, пока не образуются подсистемы, которые в условиях рассматриваемой задачи моделирования могут считаться удобными для математического
описания. В результате такой декомпозиции сложная система представляется в
виде многоуровневой конструкции из взаимосвязанных элементов, объединенных в подсистемы различных уровней.
В качестве элемента А-схемы выступает агрегат, а связь между агрегатами (внутри системы S и с внешней средой Е) осуществляется с помощью оператора сопряжения R. Очевидно, что агрегат сам может рассматриваться как Асхема, т. е. может разбиваться на элементы (агрегаты) следующего уровня.
Любой агрегат характеризуется следующими множествами: моментов
времени Т, входных X и выходных Y сигналов, состояний Z в каждый момент
времени t. Состояние агрегата в момент времени
t T
обозначается как
ztZ ,
а входные и выходные сигналы — как
xt X
и
ytY
соответственно.
Будем полагать, что переход агрегата из состояния
1
z t
в состояние
2 1
z t z t
происходит за малый интервал времени, т. е. имеет место скачок
z .
Переходы агрегата из состояния в состояние определяются собственными
(внутренними) параметрами самого агрегата
htH
и входными сигналами
xt X .
В начальный момент времени
0
t
состояния
z
имеют значения, равные
0
z
, т.е.
0
0
z z t , задаваемые законом распределения процесса
zt
в момент времени
0
t , а именно
0 L z t . Предположим, что процесс функционирования агрегата в случае воздействия входного сигнала
n
x
описывается случайным оператором
V . Тогда в момент поступления в агрегат
t
n T
входного сигнала
n
x
можно определить состояние
n n n n
z t 0 V t , z t , x .
Если интервал времени
1
,
n n
t t
не содержит ни одного момента поступления сигналов, то для
1
, n n
t t t
состояние агрегата определяется случайным
оператором
U
в соответствии с соотношением
, , 0 n n
z t U t t z t .
Совокупность случайных операторов
V
и
U
рассматривается как оператор переходов агрегата в новые состояния. При этом процесс функционирования агрегата состоит из скачков состояний
z
в моменты поступления входных
сигналов х (оператор V) и изменений состояний между этими моментами
n
t
и
n1
t
(оператор U). На оператор U не накладывается никаких ограничений, поэтому допустимы скачки состояний δz в моменты времени, не являющиеся моментами поступления входных сигналов х. В дальнейшем моменты скачков δz
будем называть особыми моментами времени
t , а состояния
z t — особыми
состояниями А-схемы. Для описания скачков состояний
z
в особые моменты
времени будем использовать случайный оператор W, представляющий собой
частный случай оператора U, т. е.
z t 0 W t ,z t .
Во множестве состояний Z выделяется такое подмножество
Y Z
, что если
z t
достигает
Y Z , то это состояние является моментом выдачи выходного
сигнала, определяемого оператором выходов
y G t ,z t .
Таким образом, под агрегатом будем понимать любой объект, определяемый упорядоченной совокупностью рассмотренных множеств
T X Y Z Z H
Y
, , , , ,
и случайных операторов V, U, W, G.
Последовательность входных сигналов, расположенных в порядке их
поступления в А-схему, будем называть входным сообщением или xсообщением. Последовательность выходных сигналов, упорядоченную относительно времени выдачи, назовем выходным сообщением или у-сообщением.
Существует класс больших систем, которые ввиду их сложности не могут быть формализованы в виде математических схем одиночных агрегатов, поэтому их формализуют некоторой конструкцией из отдельных агрегатов Аn
n NA 1,
, которую назовем агрегативной системой или А-схемой. Для описания
некоторой реальной системы S в виде А-схемы необходимо иметь описание как
отдельных агрегатов Аn так и связей между ними.
Исследование, описанное в статье про непрерывно-стохастические модели, подчеркивает ее значимость в современном мире. Надеюсь, что теперь ты понял что такое непрерывно-стохастические модели, q-схемы, сетевые модели, n-схемы, комбинированные модели, a-схемы и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Моделирование информационных систем
Комментарии
Оставить комментарий
Моделирование информационных систем
Термины: Моделирование информационных систем