Лекция
Привет, Вы узнаете о том , что такое бинауральный анализатор, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое бинауральный анализатор , настоятельно рекомендую прочитать все из категории Нейробионика.
бинауральный анализатор слуховой системы человека и
животных в отличие от технических устройств обладает
рядом характерных особенностей. Определение
направления на источник звуковых сигналов производится в нем
одновременным измерением двух параметров: разности
моментов прихода и разности амплитуд сигналов у
каждого уха. Эти параметрьГв определенных структурах
мозга могут перекодироваться один в другой, приводя к
формированию обобщенного — «результирующего» параметра,
по величине которого оценивается направление. Точ-
ность определения направления в бинауральном
анализаторе оказывается намного выше, чем точность
составляющих его элементов (нейронов—детекторов различных
параметров) [46].
При обработке информации о направлении на источник
звука нейронные структуры бинаурального анализатора
выполняют следующие операции: 1) определение момента
начала звукового сигнала и амплитуды сигнала в этот
момент; 2) позиционное кодирование крутизны переднего
фронта, частоты и интенсивности звука местом
возбужденного элемента; 3) детектирование максимумов крутизны
фронта звука и максимумов частотного спектра звука;
4) перекодирование амплитуды в задержку прихода
импульсов к уровню сравнения; 5) позиционное кодирование
интерауральной разности интенсивностей и фаз; 6)
увеличение достоверности и точности измерения направления
за счет механизмов латерального взаимодействия
элементов —[первичных детекторов направления; 7)
определение и позиционное кодирование расстояния до источника
звука; 8) детектирование скорости и направления
движения источника звука.
3.3.1. Две подсистемы обработки информации
о направлении
на источник звуковых сигналов
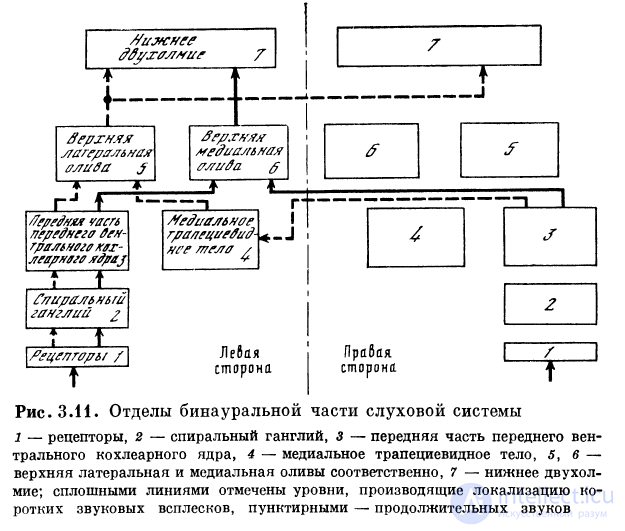
Бинауральный анализатор состоит из двух подсистем:
1) отделов, анализирующих быстрые изменения в
сигналах — подсистема «коротких звуков»; 2) отделов,
обрабатывающих усредненные характеристики сигналов,—
подсистема «длительных звуков». В первой подсистеме при
анализе сигналов используется временной метод —
обрабатывается информация о форме фронтов звуковых
всплесков на правом и левом ухе. Определение направления в
этой подсистеме осуществляется измерением
интерауральной разности фаз и амплитуд звуковых сигналов. Вторая
подсистема использует спектральный метод —
обрабатывает информацию об интерауральной относительной
разности амплитуд соответствующих спектральных
компонентов звукового сигнала (рис. 3.11).
Обе системы одновременно обрабатывают информацию
по множеству параллельных каналов. Однако при
специальном подборе звуковых сигналов главную роль может
играть одна из подсистем. Например, при определении на-
правления на источник высокочастотного звукового
сигнала постоянной амплитуды подсистема временного
анализа становится малоэффективной. Наоборот, при оценке
направления на источник одиночных резких звуковых
всплесков неэффективной становится система
спектрального анализа. Совместная работа двух подсистем
обеспечивает живым системам высокую точность в определении
направления на источники звуков в большинстве реальных
ситуаций [46].
Последовательными уровнями обработки длительных
звуков являются: 1) рецепторные элементы —
преимущественно наружные волосковые клетки кортиева органа, ин-
нервируемые спироволокнами; |2) спиральный ганглий;
3) антерио-антериовентральная часть кохлеарного
комплекса и медиальное трапециевидное тело, являющееся
вставочным на пути афферентов от третьего уровня
противоположной стороны к четвертому уровню своей стороны;
4) верхние латеральные оливарные ядра — первый]
уровень бинаурального взаимодействия афферентных
потоков импульсов; 5) нижнее двухолмие. Последовательными
уровнями обработки коротких звуков являются: 1) рецеп-
торные элементы — преимущественно внутренние волос-
ковые клетки кортиева органа, иннервируемые ортоволок-
нами; 2) спиральный ганглий; 3) антерио-антериовентраль-
ная часть кохлеарного комплекса; 4) верхние медиальные
ядра — первый уровень бинаурального взаимодействия
афферентных потоков импульсов; 5) нижнее двухолмие.
В нижнем двухолмии первичная обработка
информации о направлении на источник звука заканчивается [84].
3.3.2. Нейронные структуры первой подсистемы
Рассмотрим структурно-функциональную организацию
модели подсистемы анализа длительных звуков, выделив
операции, выполняющиеся на каждом из
последовательных иерархических уровней обработки информации,
соответствующих указанным выше нейронным отделам.
I. Кодирование частоты звука. При бинауральном
предъявлении длительного звукового сигнала на основной
мембране улитки каждого уха устанавливается волновой
процесс, воспринимающийся рецепторами. Вследствие час-
тоточувствительных свойств основной мембраны уровень
рецепторов Ьг можно представить в виде набора
полосовых фильтров, расположенных вдоль оси х так, что
координата х обратно пропорциональна основной частоте
фильтра: х — 1//, т. е. Ьг представляет собой уровень
селективных детекторов частоты (рис. 3.12).
II. Кодирование частоты-интенсивности. Уровень L2
представлен плоскостью с координатными осями:
частота — ось х (проекция оси х уровня Li); интенсивность —
ось у (вдоль направления у монотонно возрастают пороги
элементов). Элементы — аналоговые нейроны. В
плоскости ху по каждому частотному каналу х возбуждается
некоторое количество нейроподобных элементов,
составляющих столбец в направлении у, высота которого
характеризует амплитуду соответствующего спектрального
компонента звукового сигнала (рис. 3.12).
III. Детекторы максимумов частотного спектра.
Уровень L3 — плоскость с координатными осями: частота —
ось х (проекция оси х второго уровня), интенсивность-
ось г/. Элементы L3 — возбуждающие и тормозные
аналоговые нейроны. Каждый элемент уровня L3,
расположенный в точке (х, у), суммирует сигналы, поступающие от
элементов уровня L2, расположенных в некоторой локаль-
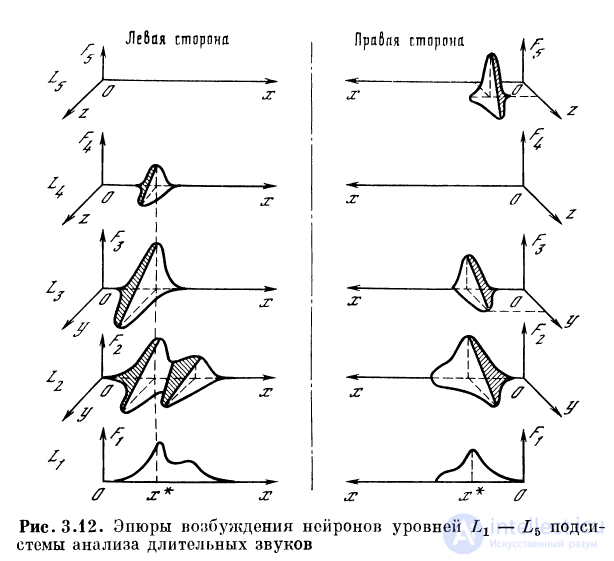
ной области с центром в точке (х, г/). За счет латерального
торможения на L3 происходит стягивание области
возбуждения вдоль оси х, т. е. обострение частотных
характеристик элементов (рис. 3.12).
IV. Кодирование интерауральной разности интенсив-
ностей. Уровень L4 — первый уровень бинаурального
взаимодействия афферентных потоков импульсов —
плоскость с координатными осями: частота — ось х (проекция
оси х третьего уровня), разность интенсивностей
звуковых сигналов на правом и левом входах модели — ось у.
Элементы L4 — аналоговые нейроны. Связи, идущие к L4
от L3 своей стороны, являются возбуждающими, связи,
идущие от L3 противоположной стороны,— тормозными.
На каждый элемент L4 поступают входные сигналы от всех
элементов L3, связанных с одним и тем же частотным
каналом, т. е. расположенных на прямой: х = const. Для
элемента правой стороны уровня L4 с координатами (х, у) суммарное входное воздействие

где F3n (я, у) и F3Jl (х, у) — амплитуды выходных
сигналов элементов правой и левой сторон уровня L4; sB (x, у, £)
и sT (ж, г/, £) — соответственно возбуждающие и
тормозные функции связи | sB (х, г/, £) | = | sT (х, у,\)\ = s (x).
На вход каждого элемента левой стороны уровня L4
поступает сигнал С/4л (х, у) = — С/4П (я, г/).
Протяженности возбужденных областей вдоль у и
величины /"а (#> I/) на уровне L3 пропорциональны амплитудам
входных сигналов. Вследствие этого площади под
кривыми F3 (x, у) пропорциональны интенсивностям, а
величина С/4П (х, у) — разности интенсивностей звуковых
сигналов на правом и левом входах. Порог элементов L4
монотонно возрастает вдоль оси у. Вследствие этого
протяженность возбужденной области вдоль оси у
пропорциональна разности интенсивностей звуковых сигналов. Если
*в (я, у,Ъ) = s (х) — а (х)у и sT (х, у,%) = s (х) + а (х) г/,
то протяженность возбужденной области будет
пропорциональна относительной разности интенсивностей. В
зависимости от того, левее или правее равносигнальной зоны
находится источник звука, возбужденная область
возникнет либо в правой, либо в левой части.
V. Детекторы направления на источник звука. Уровень
Lb — плоскость с координатными осями: частота — ось
х (проекция оси х четвертого уровня), разность
интенсивностей — ось у. Элементы Ьъ — тормозные и
возбуждающие аналоговые нейроны. На уровне Ьъ происходит
выделение края (координаты у* уровня L4 на рис. 3.3.2)
возбужденной области уровня L4 при помощи
латеральных тормозных связей между элементами L5.
Относительная разность амплитуд пропорциональна направлению на
источник звука. Поэтому элементы L5 представляют собой
селективные детекторы направления. Таким образом, на
уровне Ьь возникает возбужденная область с
координатами центра у* и #*, определяющими соответственно
направление ф на источник звука и частоту максимального
компонента в спектре звука. Размеры Ау и Ах определяют
погрешность в оценке направления на источник звука
и в оценке частоты максимального спектрального
компонента.
3.3.3. Нейронная сеть, уточняющая
оценку направления
на источник продолжительных сигналов
Точность измерения направления на источник
продолжительных звуков может быть повышена, если использовать
информацию о двух отличающихся на малый угол Дф
направлениях на источник звука. Два направления могут
быть получены за счет поворотов головЪ: на малый угол
Дф в сторону источника звука. Преобразования для
получения уточненной оценки на источник звука могут быть
реализованы в нейронной сети из двух уровней. Исходным
нейронным слоем может служить слой L4 или Ьь
подсистемы оценки направления на источник продолжительных
звуков (см. разд. 3.3.2). Повышение точности достигается
за счет исключения неизвестного расстояния до источника
звука R. Рассмотрим организацию сети и выполняемые
ею преобразования.
Координата границы возбужденной области на LA
пропорциональна относительной разности интенсивностеи

Из уравнения,
связывающего направление <р на источник звука с амплиту"
дами сигнала на правом и левом ухе [46]

Далее, при двух значениях <р, равных фх и <р2 = <рх —
— Дф (поворот головы в сторону источника), используя
соотношения
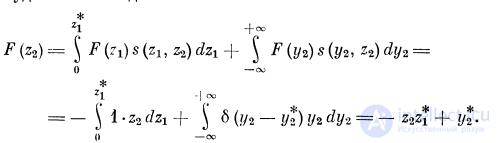
I. Об этом говорит сайт https://intellect.icu . Вычисление tg ф2 может быть реализовано в
нейронной структуре из трех слоев (рис. 3.13). На рисунке изо-
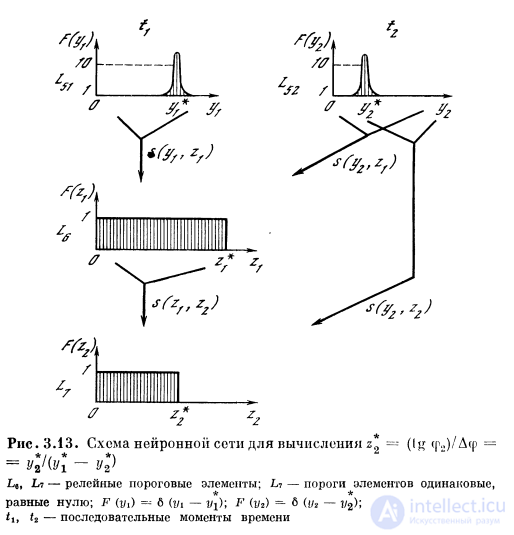
бражена схема нейронной сети, в результате
преобразований в которой выделяется край возбуждений области
с координатой z*, определяющей tg ф2: z* = tg ф2/Лф =
— Уг 1{У\ — У*)- Функции связей соответственно равны:
s (г/i, z,) = уи s (z/2, z,) = — у2; s (zl7 za) -- — z2; .9 (г/2, z2) =
— 1/2» ^ (zi) = zi (изменение порогов элементов вдоль zx).
Последовательность выполнения операций CJ[eдyющaя.
Сначала вычисляется z* = у* — у*, где z* — координата
края возбужденной области на L6. Координату z* находим
из условия F (z'i) = 0 (условие того, что в точке z*
выходной сигнал F (zf) элементов равен нулю). Для того чтобы
координата z* была пропорциональна разности
координат у* — z/*, определяющих направление на источник
звука при двух углах поворота головы фх и ф2, отличающихся
на малый угол Лф, нужно, чтобы пороги h (zx) элементов
монотонно возрастали вдоль z1 : h (zx) ^ zx. Тогда получим
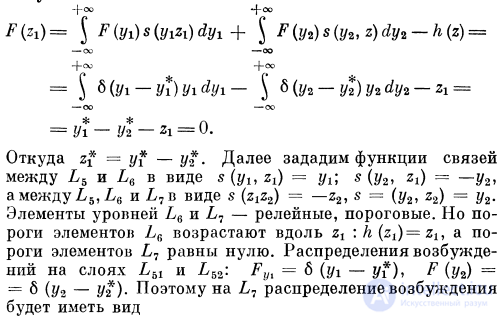
Отсюда находим координату z*, определяющую край
возбужденной области на L7 : F (z2) = — z*z* + г/* = 0;
zt = y*lz?\ zt == у*/(У* — У*) = tg Ф2/Аф. Таким
образом, z* определяет направление на источник звука в
последний момент времени (после поворота головы на Дф
в сторону источника).
Распределение F(z/i) на Ьъ возникает в момент £1?
а распределение F (у2) — в момент t2 = t± + At, где At —
время поворота головы на угол Дф. Для получения
распределений F (уг) и F (у2) на слоях L51 и ЬЬ2 достаточно
с уровня L5 к уровню Ьв подавать сигналы по двум
каналам, различающимся временем проведения (задержкой)
на величину т ^> At. Тогда начиная с момента t2 мин =
= ti + At в течение времени т на L6 и L7 будут
существовать рассмотренные картины возбуждения.
В векторном представлении указанные преобразования
будут иметь вид

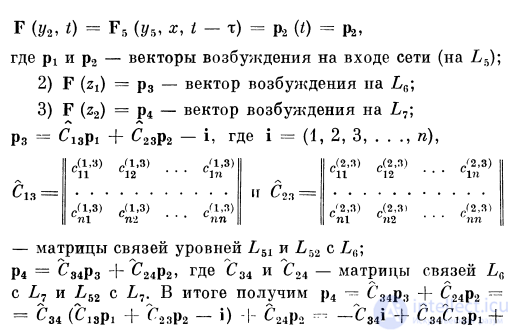
бужденной области на L7 — z* будет z* = yV(y* — У*),
где координаты у1 и у2 — соответственно координаты
краев возбужденных областей на L41 и L42. Слои L41 и L42
создаются функционально введением по одному из
каналов связи L4 с Ьв задержки т, как в рассмотренном выше
случае.
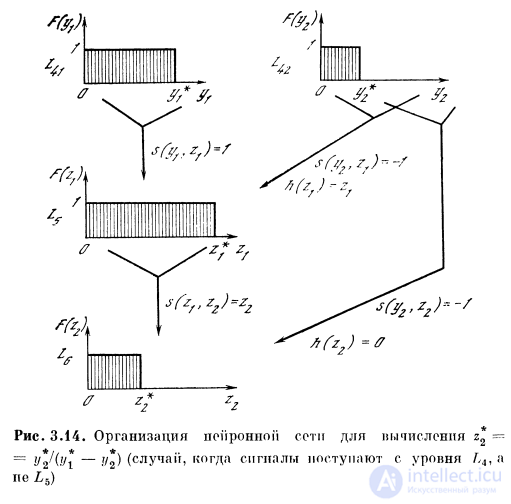
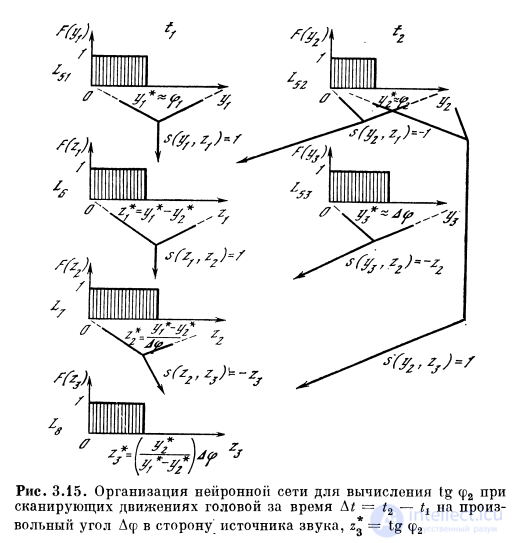
III. В случае, когда поворот Дф может принимать
произвольные значения, величина Дф может быть замерена
нейронными структурами и закодирована краем уъ на
некотором нейронном слое (см. рис. 3.15). Полученная ве-
личина г/* используется затем в нейронной структуре
(уровни L5, Le, L7, L8 на рис. 3.15) для точной оценки
tg ф: tg ф =; (yViy* — yt))Дф = yt: (yt — »J) »?•
Функции связей между уровнями должны быть выбраны
следующими: s (г/!, zx) = 1; s (г/2, zx) = —1; s (zu z2) = 1;
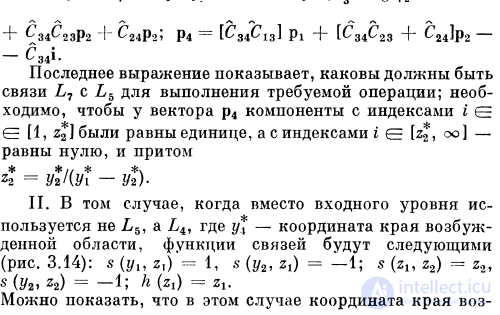
На рис. 3.16 показана гипотетическая нейронная сеть,
которую можно предполагать оканчивающейся на уровне
пирамидных нервных клеток слуховой коры мозга.
Уровень Lb здесь — нервные клетки нижнего двухолмия,
уровни L6 и L7 — пирамидные клетки, соответственно
располагающиеся в центральных (имеющие длинный
апикальный дендрит, создающий задержки т) и дорзальных
(имеющие короткий апикальный дендрит, создающий
незначительные задержки) отделах коры. Изображенная сеть,
при условии задания функций связи между уровнями так,
как указано в разд. 3.3.3, будет вычислять оценку
направления на источник по величинам относительных
разностей амплитуд при двух направлениях на источник звука,
отличающихся на Дф. Получаемая оценка не будет
зависеть от интенсивности звука и расстояния до источника
звука. Тем самым повысится разрешающая способность
системы оценки направления на источник звука.
3.3.4. Нейронные структуры второй подсистемы
Обработка информации о коротких звуках или участках
резких изменений амплитуды в длительных сигналах
осуществляется в два этапа. На первом этапе производится
монауральная обработка, в результате которой
формируется результирующая посылка импульсов. Момент
появления импульсной посылки на выходе сравнивающего
блока бинауральной обработки определяется двумя
параметрами звука: моментом его прихода к одному из ушей и
амплитудой. На этапе бинауральной обработки
осуществляется точное вычисление интерауральной разности
результирующих моментов. По величине этой разности
делается суждение о направлении на источник звука.
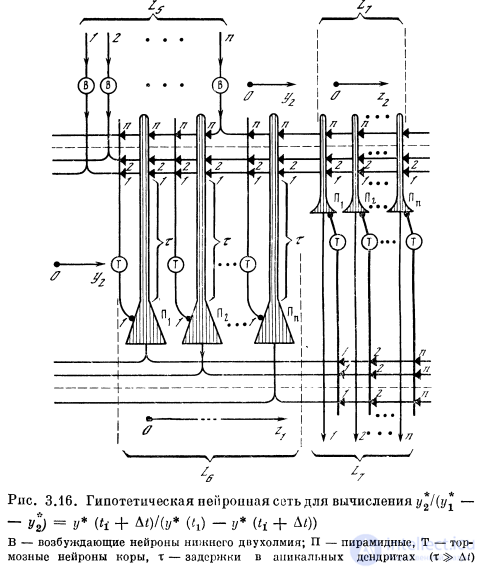
I. Кодирование крутизны фронта Звуковых
импульсов. При восприятии быстропротекающих процессов
основная мембрана и рецепторы представляются в виде
набора инерционных звеньев, постоянная времени которых
возрастает вдоль оси х (ось х соответствует продольному
направлению мембраны от базального к апикальному кон-
цу) [111]. На выходе каждого звена возникает
электрический потенциал, пропорциональный величине отклонения
соответствующего участка мембраны. Таким образом, на
первом уровне Ll звуковой сигнал распределяется по
множеству параллельных каналов, различающихся лишь
инерционностями элементов на их входах. Информация
о разных (по крутизне и длительности) звуковых
импульсах передается разными группами каналов (рис. 3.17).
II. Кодирование интенсивности. На L2 происходит
преобразование «интенсивность — место» (позиционное
кодирование интенсивности). От каждого рецептора на
уровне Z/j связи идут к группе нейронов на L2. Нейроны
упорядочение расположены в направлении возрастания
порогов и образуют «строку» (рис. 3.17) на двумерном слое
(х, у2), где х — направление изменения частотных свойств
входного преобразователя, а у2 — направление изменения
порогов. Каждый элемент L2 отвечает на звуковой импульс
только одним импульсом — работает в дискретном
режиме. Реакция L2 на передний фронт звукового сигнала
состоит в распространении возбуждения вдоль «строки» со
скоростью, пропорциональной крутизне фронта сигнала.
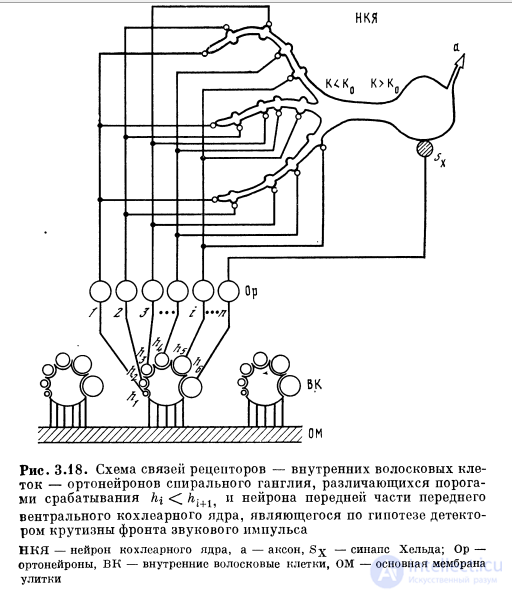
III. Кодирование максимумов крутизны. Нейроны
L3 — детекторы определенного закона движения
возбуждения по строкам L2. Их функция состоит в том, чтобы
определить координату у2 участка строки, в котором скорость
распространения возбуждения на L2 достигает
максимума. Значение у3 определяет при этом амплитуду точки
наибольшей крутизны на фронте звукового сигнала. Волокна
от элементов L2 с различными порогами h подходят к
локальным расширениям дендритных ветвлений элемента
L3. Для срабатывания элемента слоя L3 необходимо,
чтобы к соме одновременно пришли импульс с дендрита
и от синапса Хельда (рис. 3.18). На пути импульса,
возникшего в начале дендрита и движущегося к соме,
расположено несколько локальных расширений.
Прохождение импульса через локальное расширение дендрита
существенно облегчается (ускоряется), если в расширения
синхронно с приходом переднего фронта импульса
подаются возбуждающие синаптические токи. Иными словами,
каждое ветвление представляет собой управляемую
линию задержки [4], скорость распространения по которой
зависит от количества локальных расширений и
временной организации синаптических импульсов, которые на
эти расширения поступают. Поэтому каждый элемент L3
является детектором определенной временной
организации ансамбля импульсов, поступающих на его дендриты.
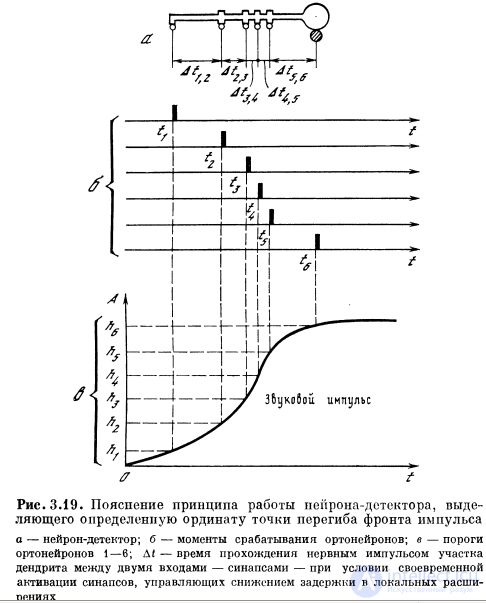
Для определения на фронте звукового сигнала
ординаты точки максимальной крутизны нужно определить
место наибольшей скорости движения возбуждения по
«строке» нейронов L2. Локальные расширения на
дендрите нейрона-детектора L3 расположены так, что отрезки
дендрита между ними монотонно уменьшаются (или моно-
тонно возрастают диаметры этих отрезков и т.д., см. рис.
3.19). Совпадения моментов прихода на локальное
расширение распространяющегося по дендриту и поступающего
от синапса импульсов будет происходить только в нейроне
L3, расположенном над тем участком строки L2, на
котором скорость движения возбуждения близка к максимуму.
В итоге координата у3 сработавшего элемента на L2 будет
пропорциональна ординате точки максимальной
крутизны на переднем фронте звукового сигнала или его
амплитуде. В случае нескольких ответвлений нейрон отвечает
на одну и ту же амплитуду при разных крутизнах
переднего фронта.
IV. Перекодирование амплитуды в опережение.
Детекторы задержки. На дендритах уровня L4
осуществляется перекодирование амплитуды звука в
дополнительную задержку. Для этого связи элементов L3 с элементами
L4 организованы следующим образом: чем больше
координата г/3 нейрона L3, тем ближе к соме нейрона L4 на его
дендрит поступает импульс от нейрона L3. Таким образом,
время распространения импульса по дендриту до сомы
элемента L4 зависит от амплитуды входного сигнала: чем
больше амплитуда, тем меньше время распространения.
В итоге на выходе дендрита (на входе в сому) нейрона L4
импульс появляется в некоторый результирующий момент,
равный сумме двух величин: 1) момента достижения
максимальной крутизны передним фронтом звукового
сигнала и 2) времени распространения импульса по дендриту
элемента L4 до сомы. Результирующий момент
представляет собой обобщенный параметр сигнала, зависящий от
момента его прихода к уху и от интенсивности этого
сигнала.
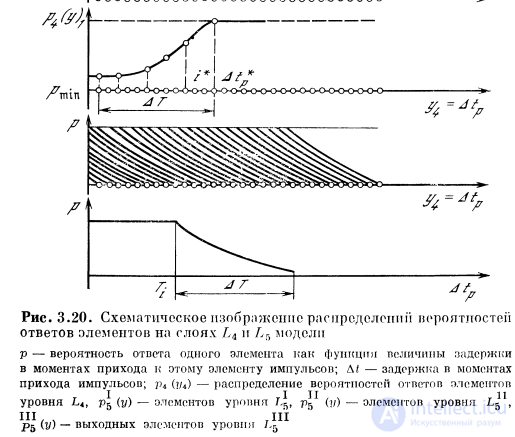
Каждый элемент L4 отвечает с вероятностью, равной
единице, если разность результирующих моментов Д£р
прихода к нему сигналов справа и слева меньше нуля:
Д^р = £р — £р < 0. Вероятность ответа элемента
монотонно убывает с увеличением Д£р. За счет разных длин
линий задержек справа и слева у элементов с разными
координатами z/4 осуществляется сдвиг по оси Д£р
указанных характеристик на величину, пропорциональную
z/4 (рис. 3.20). В итоге получим следующее распределение
вероятностей ответов нейронов-элементов L4 вдоль i/4:
вероятность ответа элемента равна единице, когда его
координата i/4 удовлетворяет условию Д£р <^ i/4, и
монотонно убывает при Д£р > i/4 (рис. 3.20). Информация о
направлении на источник звука связана, следовательно,
с положением на оси г/4 области изменения вероятности
ответов элементов L4 от нуля до единицы.
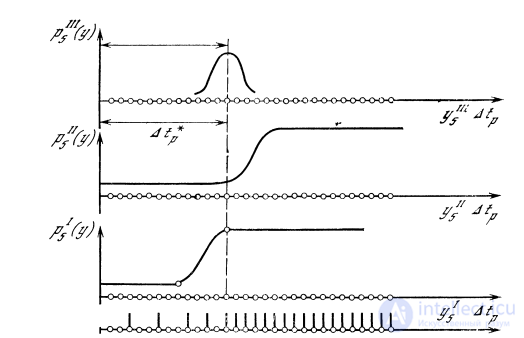
V. Детекторы направления на звук. На Lb
выполняются две операции: сужение зоны неопределенности (т. е.
увеличение крутизны кривой, описывающей
распределение вероятностей ответов элементов (рис. 3.20), и
выделение координаты у* по оси г/4, при которой
максимальна крутизна этой кривой. Обе эти операции
осуществляются за счет механизмов латерального торможения
[46]. В результате на Ьъ возникает локальная область
возбуждения. Положение этой области у* по оси уь
определяет направление на источник звуковых импульсов,
а размеры области — на точность определения
направления. Положение и размеры возбужденной области по оси
х представляются видом звукового сигнала — его
крутизной и длительностью.
3.3.5. Нейронные механизмы определения
расстояния до источника звука
Направление ф на источник продолжительного звука,
расстояние R до него, амплитуды Ал и Ап звуков,
приходящих соответственно на левый и правый точечные
приемники, связаны следующим соотношением [46 J:

где d — расстояние между приемниками. Отсюда
получаем sin ф = {dIAR + Rid) ((Al — Al)/(Al+Al), т.е.
направление пропорционально относительной разности
интенсивностей (квадрат амплитуды равен интенсивности)
на правом и левом приемниках.
Оценка направления ф*, получаемая на уровнях L4 и
Lb подсистемы анализа продолжительных звуков,
пропорциональна относительной разности интенсивностей
ф* = (А2Л - A2u)/(Al + Al). Поэтому sin <p = (dim +
+ R/d)tp* = &(Д)ф*. Для определения R (или
однозначной функции расстояния к (R) = (d/AR + Rid))
необходимо знать либо ф и оценку ф*, либо две оценки ф^ и
Ф* при двух разных направлениях фх и ф2 на источник
звука. По-видимому, информация о расстоянии может
быть получена за счет сканирования (поворота на малый
угол Дф) системой в сторону источника звука. В этом
случае будем иметь соотношения ф* (х) = ilk (R) sin фь
ф* (я) = 1/& (Щ sin ф2, фх = ф2 + Дф.
Решив эти уравнения относительно к (R), получим
к2 = sin2 Дф/(ф*2 + фГ — 2ф?ф2* cos Дф). Таким
образом, задача определения расстояния сводится далее к
реализации на нейронных слоях операций, вычисляющих
К (R). Операции следующие:
1. Позиционное кодирование информации об оценке
ф* направления ф на источник звука местом края
возбужденной на L1 области. Элементы Lx имеют релейный тип
ответа. (L1 — здесь проекция слоя L4 подсистемы анализа
длительных звуков.)
2. Операция sin2 Дф и позиционное кодирование
информации о величине sin 2Дф местом края возбужденной
области на L0. Функция связи s (г/0, у0) уровней L0 и L0
имеет вид г
s (г/о. Уо) = (sin2 Аф)'Аф — у'^о (у0) = 2 cos Дф sin Дф —
— Уо<у (Уо) = sin 2Дф — Уо<У (г/0).
3. Операция г/0* = 1/cos Дф, где у"* — координата
края возбужденной области на L0. Функция связи s (у0, у0)
уровней L0 и L0 имеет вид s (г/0> у0) = —sin Дф/
/cos2 Дф —у"0о (г/о).
4. Операция задержки выходного сигнала слоя L1 на
т, производимая элементами L2.
5. Операция у3 = г/0 /2г/х =1/2 cos Дффх, где
координата края возбужденной области на L3. Функция
связей уровней L0 и L3, а также уровней Ьг и L3
соответственно s (г/0? У в) = s0; s (уи г/3) = — 2ЗДз-
6. Операция у* = г/г/г/з = ^/(1/2 cos ДФФ1) =
= 2фхф2 cos Дф, где г/4 — координата края возбужденной
области на L4. Функции связей s (г/2, г/4) = 50, 5 (г/3^4) ~
= —s0yt.
п г\ * *2 | *2 * *2 i *2 I
7. Операция г/5 = ух + у2 — у± = <Pi + ф2 +
+ 2фхф2 cos Дф, где уъ — координата края
возбужденной области на L5. Функции связей s (уи уь) —
= 2г/!, s{y2yb) = 2г/2; *(г/4, г/б) = —1. Пороги элементов L5
монотонно возрастают вдоль г/5.
8. Операция у* = г/0*/г/* = sin2 Дф/(ф?2 + ф*2 —
— 2фхф2 cos Дф где г/6 координата края возбужденной
области на L6. Функции связей s (г/0, г/6) = s0, 5 (y5yQ) =
= — ЗДв-
Результат операции 8 существует в течение времени ISt
после поворота системы приемников на Дф. В остальное
время ответ элементов Le отсутствует.
При малых величинах Дф выражение для к2 (R)
упрощается: к2 (R) ~ ДФ2/(ф1*2 + ф*2 - 2ф1*ф2) = | Дф |2/
/1 (ф1 — Ф2)21- Реализация этой операции осуществляется
на четырех слоях. Операции следующие: L0
—кодирование краем г/0 величины | Дф |, L3 — операция деления
г/0/г/х * |, L2 — операция кодирования краем уг величины
I ф1 — фг |? L1 — кодирование | щ — ф2 | числом
возбужденных элементов. Далее, приравнивая выражение
к (R) — (d/4ff) — {Rid) нулю, получаем квадратное
уравнение относительно R: R2 — k2dR + d2/4 = 0,
где к = | Дф |/| фх — ф2 |. Откуда определяется R ~
= (d/2) [J ДФ \/\ Ф? - ф2* | ± У"Дф2/(Ф^-ф^)2-1].
Таким образом, рассмотренная последовательность
операций на нейронных слоях приводит к получению оценки
расстояния до источника продолжительных звуковых
сигналов. Промежуточные результаты преобразований и
оценка расстояния кодируются местом краев
возбужденных областей на соответствующих слоях.
3.3.6. Физиологические основания для разработки
модели бинаурального анализатора
Из физиологических соображений следует, что система
оценки направления на источник звука должна
располагать такими параметрами, как моменты прихода
импульсов и их амплитуды (в эти моменты) на правом и левом
входах. С другой стороны, имеются данные физиологов
[1] о том, что разность амплитуд и моментов прихода
звуков на правый и левый входы взаимозаменяемы.
Таким образом, гипотезу об образовании в подсистеме
анализа коротких звуков (на L3 — L4) единого параметра,
определяемого моментом прихода и амплитудой сигнала,
подкрепляют как физические соображения, так и данные
физиологии.
Прямые экспериментальные данные, вскрывающие
механизм оценки моментов прихода и амплитуды сигналов
в бинауральном анализаторе, отсутствуют. Известно лишь
следующее: а) на выходе мембраны фронт импульса имеет
^-образную форму, т. е. содержит точку перегиба при
ненулевой амплитуде; б) данные электрофизиологии [27]
свидетельствуют о наличии в кохлеарных ядрах детекторов
крутизны фронта звукового сигнала. Исходя из этих
данных, было сформулировано предположение о том, что
начало сигнала определяется по моменту наибольшей
крутизны или максимуму первой производной переднего
фронта этого сигнала на выходе мембраны улитки.
В подсистеме анализа коротких звуков используется
представление о «принципе места» применительно к
переработке информации об амплитуде сигнала [20].
Поскольку элементы системы не передают аналоговых величин
(являются фазическими, т. е. отвечающими на стимул
оДним-Двумя импульсами), то Тем весомее представляются
доводы в пользу того, что оценка амплитуды
производится числом возбужденных элементов. Вариантом такого
представления и является преобразование «амплитуда —
место», введенное в модели: чем больше возбуждено
элементов, тем дальше сдвигается граница возбужденной
области.
Представление об обработке информации на уровнях
L4 и Ьъ основано на следующих фактах. По
физиологическим данным ответ нейронов медиальных олив [1, 64]
(аналогами которых являются элементы уровня L4) на
бинаурально предъявляемый стимул состоит в наличии
или отсутствии выходного импульса. При изменении
направления на источник звука меняется вероятность
появления выходного импульса нейрона. Изменение вероятности
ответа нейрона происходит на значительном временном
интервале того же порядка, что и диапазон изменения ин-
терауральной разности результирующих моментов.
Поэтому нейрон медиальных олив можно рассматривать как
первичный детектор направления с весьма пологой
вероятностной характеристикой. Элементы именно такого
типа располагаются на уровне L4. Вследствие того что
элементы L4 не могут измерить Atv с достаточной точностью,
возникает задача уровня L5: обработать выходные сигналы
элементов уровня L4 так, чтобы повысить
детерминированность результатов измерения. По
электрофизиологическим данным повышение детерминированности
наблюдается в ответах нейронов нижнего двухолмия. Эти
нейроны имеют более резкое изменение вероятности
ответа при изменении Д£р, чем нейроны медиальных олив [1].
В результате обработки сигналов рецепторов в
подсистеме анализа длительных звуков на уровне Lb
направление на источник звука определяет г/* — координата центра
локальной возбужденной области по оси уь, а
разрешающую способность по углу — Дг/ (ширина этой
возбужденной области). В случаях, когда на уровне Ьъ
возбужденная область получается слишком размытой и не
обеспечивает нужную разрешающую способность, сигнал с
выхода уровня Ьь может быть подвергнут
дополнительной обработке на одном или нескольких слоях с
латеральными связями. Эта обработка состоит в обострении
возбужденной области (см. [22]). В рассматриваемой
подсистеме направление на источник звука определяется путем
измерения интерауральной разности интенсивностей
Звука. Поэтому оценка разрешающей способности
подсистемы может быть произведена, исходя из данных о
дифференциальном пороге слуховой системы по
интенсивности: минимальное значение дифференциального порога
составляет 0,7 дБ. Различие в интенсивностях левого и
правого сигналов на 0,7 дБ соответствует направлению
на источник звука в 5° [66]. Эта величина совпадает с
измеренной в психофизиологических экспериментах
разрешающей способностью по углу [1].
В общем случае на входы бинаурального анализатора
могут одновременно поступать несколько различных
звуковых сигналов от нескольких источников. На уровне Ьъ
возникает тогда одна или несколько областей
возбуждения, в зависимости от того, больше или меньше
критического интервала (определяемого разрешающей
способностью нейронной сети на Ьь) расстояние между этими
максимумами. Наличие нескольких возбужденных
областей на уровне Ьь соответствует одновременному
обнаружению нескольких источников звуковых сигналов.
Детекторы бинауральной разности фаз. Различные
направления источника звука характеризуются тем, что
фронт звуковой волны достигает одного и другого уха с
некоторой задержкой во времени. При непрерывном
сигнале этот временной сдвиг сводится к сдвигу по фазе
колебаний, достигающих каждого уха.
Градуальные первичные детекторы бинаурального
сдвига по фазе осуществляют преобразование фазового
сдвига в амплитуду ответа. Один градуальный нейрон
генерирует амплитуду сигнала, возрастающую с
увеличением длительности сдвига.
Детекторы направления движения звука в пространстве.
Детектирование направления движения звука
осуществляется подключением детекторов направления звука
к детекторам направления движения. Детекторы
направления движения звука могут быть основаны на
перекодировании бинауральной разницы интенсивности или
бинаурального сдвига по фазе. Формирование
селективности в отношении направления движения достигается
анизотропным латеральным торможением между входами
детекторов направления. В зависимости от направления
передачи тормозящих влияний нейрон не отвечает тогда,
когда сигнал перемещается в одном и том же
направлении. Анизотропное латеральное торможение делает нейрон
селективным к направлению движения звука. Детекторы скорости движения звука. Подключение
детекторов направления движения к градуальным
детекторам скорости осуществляется с разными временами сум-
мации. При этом в одном градуальном нейроне возникает
сигнал, возрастающий по амплитуде с ростом скорости
движения. В другом градуальном нейроне с возрастанием
скорости амплитуда сигнала снижается. Таким образом,
скорость движения звука превращается в вектор
возбуждения градуальных нейронов. Селективные детекторы
скорости стоят на выходе сети. Их ответы формируются из
комбинаций возбуждений градуальных нейронов. В
зависимости от скорости движения звука максимум
возбуждения перемещается по цепочке детекторов скорости.
Нейроны, селективные в отношении пространственного
положения акустического сигнала. В структурах,
гомологичных заднему двухолмию млекопитающих, у совы
находятся нейроны, селективно настроенные на разные
комбинации значений азимута и склонения. Совокупность
пространственно-селективных нейронов образует
слуховую квазирецептивную поверхность, аналогичную
зрительному пространству. Рецептивное поле подразделяется
на возбуждающий центр и тормозную периферию
аналогично тому, как это имеет место у концентрических
рецептивных полей нейронов сетчатки. Нейрон отвечает на
звук, исходящий из ограниченной области пространства.
Селективность нейронов по направлению достигается
за счет селективности их реакций на бинауральную
разницу в приходе сигналов к каждому уху. Здесь можно
использовать уже описанную нейронную сеть. Сложнее
решить вопрос о селективности в отношении склонения.
Есть данные [3, 70], что слуховые проходы совы снабжены
выступами. В одном ухе ослабляется сигнал,
поступающий сверху, в другом — снизу, таким образом создается
бинауральная разность сигналов, передающая
информацию о склонении. Однако следует учитывать
бинауральную разность интенсивностей, связанную с азимутом
источника звука. Информация, содержащаяся в бина-
уральной разности фаз, может быть использована для
компенсации бинауральной разности интенсивностей,
зависящей от азимута источника звука. Таким образом,
окончательно формируются два сигнала: сигнал
склонения и сигнал азимута. Нейроны, селективные к
определенной комбинации азимута — склонения, образуют
систему детекторов, связанных между собой латераль-
ным торможением. Вклад латерального торможения
образует тормозную зону рецептивного поля детектора.
Анализ данных, представленных в статье про бинауральный анализатор, подтверждает эффективность применения современных технологий для обеспечения инновационного развития и улучшения качества жизни в различных сферах. Надеюсь, что теперь ты понял что такое бинауральный анализатор и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Нейробионика

Комментарии