Лекция
Привет, Вы узнаете о том , что такое эпохальные этапы развития робототехники 1959-2013, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое эпохальные этапы развития робототехники 1959-2013 , настоятельно рекомендую прочитать все из категории Искусственный интеллект. Основы и история. Цели..
 эпохальные этапы развития робототехники 1959-2013 " width="740" height="292" />
эпохальные этапы развития робототехники 1959-2013 " width="740" height="292" />
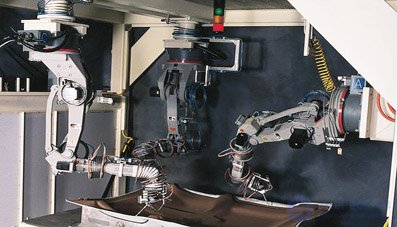
В настоящее время, промышленные роботы применяются практически в любых отраслях промышленности. В развитых странах, уже выросло целое поколению людей, которое не видело производства без использования промышленных роботов. Робот – это уже неотъемлемая часть жизни человека и наш портал решил отметить самые значимые события, которые повлияли на развитие робототехники и роботизированных технологий в мире.
1959 - Разработка первого промышленного робота
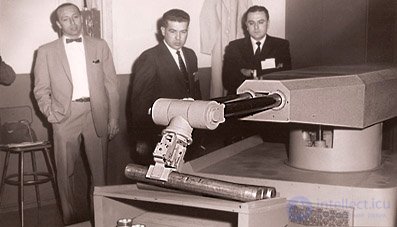 |
Первый промышленный робот был создан изобретателем самоучкой Джорджем Деволом. Робот весил две тонны и управлялся программой записанной на магнитном барабане. Создатели использовали гидравлические приводы, а точность манипулятора составляла 0,254мм. В результате был оформлен патент США № 2988237 и затем основана компания Unimation. |
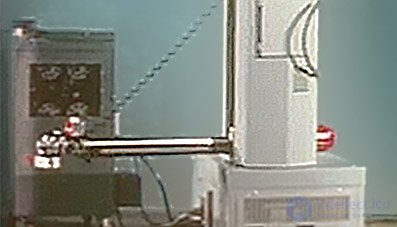
1961 - Компания Unimation внедрила первый робот
 |
Первый в мире промышленный робот был внедрен на производственной линии завода General Motors, штат Нью-Джерси. Робот был задействован в процессах (перемещения) изделий при производстве кулис для переключения передач, а так же оконных ручек. Себестоимость технологии составляла около 65 000$, но Unimation продала его всего за 18 000$. Управляющая программа была записана на магнитном барабане вес которого составлял 1814 кг.
|
1962 - Установлен первый цилиндрический робот
 |
6 роботов Versatran от компании AMF (American Machines Foundry), были установлены на заводе Ford в Гуанчжоу, США. Название Versatran был определно от слов "versatile transfer". |
1967 - Установлен первый промышленный робот в Европе
 |
Первый промышленный робот в Европе, был установлен на металлургическом предприятии - Uppsland Väsby, Швеция. |
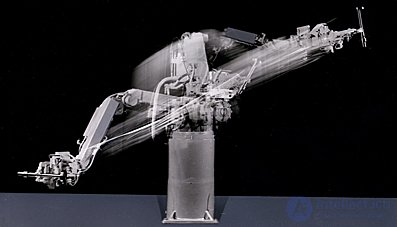
1968 - Создан первый промышленный робот - рука
 |
Создан первый промышленный робот манипулятор аналогичный человеческой руке |
1969 - Внедрен первый робот для автоматизации точечной сварки в США
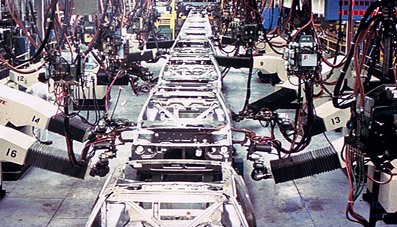 |
Внедрение роботов Unimation для автоматизации контактной сварки на предприятии General Motors, США, позволило увеличить общую производительность завода, а так же значительно сократить тяжелую и опасную работу людей. |
1969 - Создание первого образца технического зрения для робота
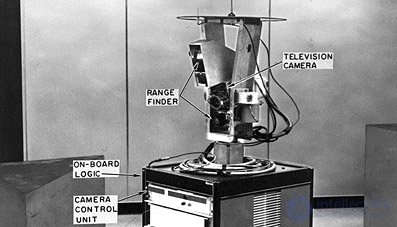 |
Первое техническое зрение для промышленных роботов, было продемонстрировано в Стэнфордском исследовательском институте |
1969 - Появление первых покрасочных роботов в мире
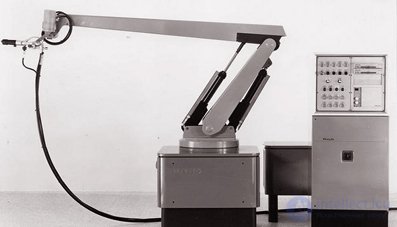 |
Норвежская корпорация Trallfa разработала первые промышленные покрасочные роботы для собственного потребления. Основным толчком для развития данного направления послужила нехватка рабочей силы в этом периоде. |
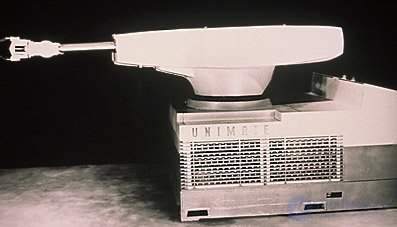
1969 - Unimation начинает освоение рынка Японии
 |
Компания Unimation подписывает соглашение с Японской корпорацией Kawasaki Heavy Industries, чтобы производить и продавать промышленные роботы на азиатских рынках. Именно Kawasaki принято считать пионером Японии в области робототехники. В 1969 году, Kawasaki выпустила первый промышленный робот, когда-либо созданный в Японии. Робот назывался - Unimate Kawasaki 2000. |
1970 - Hitachi (Япония) создало интеллектуальное техническое зрение
 |
Робот впервые смог определять габариты изделий и место их расположения. |
1971 - Установлена первая роботизированная линия на заводе Daimler Benz
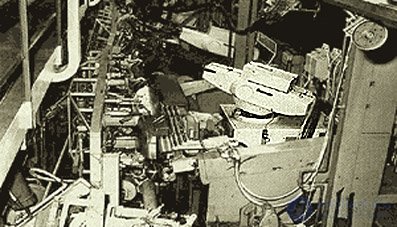 |
Первая производственная линия с применением сварочных роботов в Европе, была поставлена компанией KUKA на завод Daimler Benz, Sindelfingen. |
 |
Была создана первая национальная ассоциация производителей промышленных роботов Японии –JIRA. Об этом говорит сайт https://intellect.icu . Позже она была переименована в JARA. |
 |
KUKA разрывает соглашение об использовании роботов Unimate и приступает к разработке собственных роботов. Промышленный робот KUKA Famulus, был первым в мире шести-осевым манипулятором с применением электропривода для всех осей. |
 |
Stanford arm это роботизированная рука предназначенная для сборки небольших изделий с использованием датчиков касания и сенсоров обратного давления. Управление данным роботом осуществлялось с помощью мини-ЭВМ. Позже, создатель данного робота профессор Шейман основал компанию Viacarm Inc для продвижения и реализации данной технологии на производственных предприятиях. |
1974 - Появление первого промышленного контроллера для упралвения роботом
 |
По заказу компании Cincinnati Milacron Corporation, был создан первый в мире промышленный робот программируемый контроллером. Робот был назван T3. |
1974 - Первый робот для дуговой сварки был внедрен в Японии
 |
Корпорация Kawasaki с использованием технологии Unimate, создала робот для автоматизации дуговой сварки рамы мотоциклов Kawasaki. Впервые в роботизированной сварки, были применены датчики касания и столкновения. |
1974 - Впервые был применен цифровой микропроцессор в контроллере робота
 |
Промышленный робот IRB 6 от компании ASEA (будущая ABB), был первым манипулятором управление которым осуществлялось контроллером S1, в котором использовался 8-ми битный микропроцессор Intel. Объем памяти процессора, составлял 16Кб. S1 имел 16 цифровых входов/выходов и программировался с помощью 16 клавиш и четырехразрядный цифровой дисплей. |
1975 - Создан первый промышленный робот грузоподъемностью до 60 кг
 |
С появлением спроса в автомобильной промышленности на роботы с более высокой грузоподъемностью, компания ABB создала первый в мире промышленный робот с полезной нагрузкой до 60 кг. Впервые данный робот был использован на заводе Saab, Швеция. |
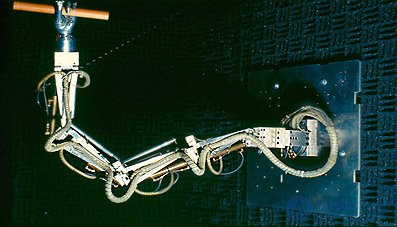
1976 - Впервые робот в космосе
 |
Рука робота впервые была применена в космических зондах Viking 1 и 2. |
1978 - Создан первый промышленный робот Reis
 |
Создан первый промышленный шестиосевой робот Reis с собственным контроллером RE15. |
1978 – Первые универсальные сборочные роботы PUMA от Unimation и Vicarm
 |
При поддержки General Motors, были внедрены роботы PUMA (Unimation/Vicarm) для автоматизации сборочных процессов. Это позволило сократить значительную часть людей занятых в подобных операциях. |
1978 - Разработка первых роботов SCARA
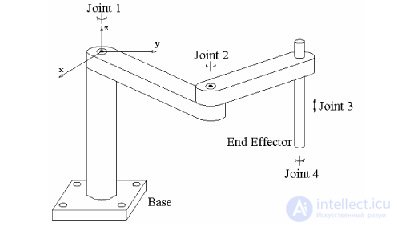 |
В 1978 Хироши Макино из университета Яманаси, Япония, разработал робота-SCARA. Это был технологический прорыв, поскольку именно роботы Scara были оптимальным решением для некоторых технологических операций связанных с быстрым перемещением изделий. |
 |
Задачи по автоматизации точечной сварки, открыли новую эру в робототехнике с применением электро-редукторов, пришедшим на смену гидравлическим приводам. Компания Nachi, Япония разработали первый робот на базе редукторов. |
 |
Портальные роботы предоставляет гораздо большую досягаемости, чем классические роботы с основанием, и могут заменить сразу несколько таких роботов. |
1981 - Производство первых роботов Puma в Европе
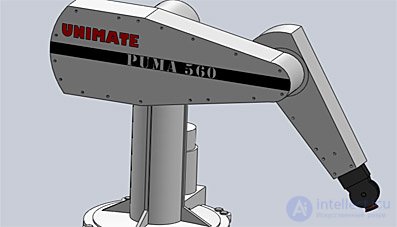 |
Финская компания Nokia приступила к производству промышленных роботов по лицензии Unimation. В 1980-ых годах было выпущено около 1500 роботов с торговым названием Puma, среди них была популярная модель Puma-560. |
 |
Специально для роботизированных предложений, IBM создал мощный и легко применимый язык программирования. |
 |
Компания Adept предстала на рынке новый тип роботов SCARA с применением электродвигателей. Новая конструкция сделала роботы более простыми и надежными, сохранив высокую скорость. |
1985 - KUKA создает новую Z-форму манипулятора
 |
Новая Z форма, значительно добавила гибкости и универсальности манипулятору обеспечивая три поступательных и три вращательных движения. Именно эту конфигурацию применяют большинство производителей в настоящее время. |
1985 - Впервые, роботы начали делать роботов
 |
Первые кто использовал собственные промышленные роботы для создания роботов, была компания Fanuc |
1992 - ABB представила принципиально новый контроллер S4
 |
S4 значительно значительно облегчил создание рабочих программ робота за счет удобного внешнего интерфейса. |
1994 - Появление первого контроллера для упрвления одовременно двумя роботами
 |
Motoman создал первый контроллер (MRC), который обеспечил синхронное управление двумя роботами и управление до 21 оси. MRC так же позволил редактировать программы с помощью обычного персонального компьютера. |
1996 - KUKA выпустила первый контроллер на базе Windows
 |
Впервые контроллер предложил пользователю понятный интерфейс Windows, а так же 6d мышку для упрощения и ускорения процессов создания управляющих программ. |
1998 - ABB представила первый в мире робот Паук
 |
ABB создала самого быстрого робота впервые применив Дельта дизайн, или как сегодня называют дизайн-паука. Этот робот получил название FlexPicke, а имея его создателя Реймон Клавел. Этот робот был способен переместить 120 изделий в минуту, а скорость его перемещения достигала 10 метров/сек. |
2003 - Робот отправился на Марс
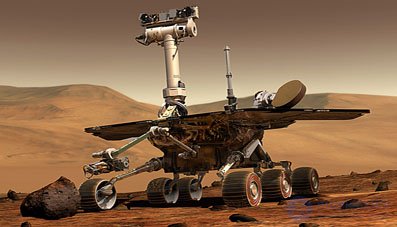 |
Миссия Mars Exploration Rover началась в 2003 году с момента отправки из двух роботизированных марсоходов, для исследования Марса и геологии. |
2003 - Первый робот Аттракцион
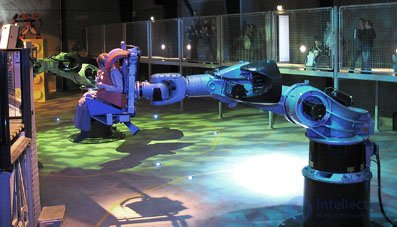 |
KUKA первый из производителей промышленных роботов представила Аттракцион получивший название Robocoaster. Robocaster применяется в парках развлечения и специализируется на экстремальном вращении любителей острых ощущений. |
2004 – Motoman представил первый контроллер управляющий до 38 осей
 |
Motoman, Япония представил улучшенный контроллер (NX100), который обеспечивал синхронное управление четырьмя роботами, до 38 осей. NX100 получил сенсорный экран и базировался на операционной системе WindowsCE. |
2006 - KUKA представила первый облегченный робот
 |
KUKA, совместно с DLR (Институт робототехники и мехатроники, Германия) создали первый робот из алюминия, который при грузоподъемности 7 кг имел вес 16 кг. Первый аналогичный робот со схожими характеристиками весил 2000 кг. |
2006 – Создание человекоподобного промышленного робота
 |
Motoman, Япония произвел первого человекоподобного робота с 13 осями. Данный робот очень хорошо проявил себя в операциях по сборке изделий. |
2007 - Первый ромышленный робот грузоподъемностью 1000 кг
 |
KUKA первая в мире создала промышленный робот грузоподъемностью 1000 кг. Он значительно расширил границы применения промышленных роботов, фактически создав новый класс в досягаемости и грузоподъемности. |
2008 - Первый промышленный робот грузоподъемностью 1200 кг
 |
В 2007 году Fanuc M-2000iA стал самым грузоподъемным и досягаемым промышленным роботом в мире. Его запястье позволяло удерживать изделия весом до 1200 кг. |
2009 - Motoman создал контроллер способный синхронно управлять до 8 роботов
 |
Yaskawa Motoman, Япония, представила улучшенный контроллер (DX100), который обеспечил синхронное управление до восьми роботов, до 72 осей. |
2011 - Первый робот-гуманоид в космосе
 |
Первый робот-гуманоид Robonaut (R2B) был отправлен на Международную космическую станцию. |
В заключение, эта статья об эпохальные этапы развития робототехники 1959-2013 подчеркивает важность того что вы тут, расширяете ваше сознание, знания, навыки и умения. Надеюсь, что теперь ты понял что такое эпохальные этапы развития робототехники 1959-2013 и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Искусственный интеллект. Основы и история. Цели.

Комментарии