Лекция
Привет, Вы узнаете о том , что такое mouse wheel encoder , Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое mouse wheel encoder , настоятельно рекомендую прочитать все из категории электромеханические устройства электронных аппаратов.
Wheel Encoder (энкодер колеса прокрутки) — это миниатюрное устройство внутри компьютерной мыши, которое преобразует вращение колесика прокрутки в цифровые импульсы. Эти импульсы позволяют операционной системе определить направление и скорость вращения колеса, обеспечивая вертикальную или горизонтальную прокрутку в интерфейсе.
Колесо прокрутки — это колесо, используемое для прокрутки . Этот термин обычно относится к таким колесам, используемым на компьютерных мышах (где их также называют просто колесиком мыши ). Оно часто изготавливается из твердого пластика с резиновой поверхностью и вращается вокруг внутреннего вращающегося энкодера . Обычно оно расположено между левой и правой кнопками мыши и перпендикулярно поверхности мыши. Иногда колесо можно нажимать влево и вправо, что фактически означает две дополнительные кнопки макроса.
Колесо прокрутки располагается горизонтально между кнопками мыши и обычно используется для вертикальной прокрутки, при этом вращение колеса снизу вверх называется прокруткой «вверх» или «вперед», а обратный ход, т. е. вращение колеса сверху вниз, называется прокруткой «вниз» или «назад».
В графическом пользовательском интерфейсе движение «вверх» перемещает содержимое окна вниз (а ползунок полосы прокрутки , если он есть, вверх), и наоборот. В других конфигурациях (иногда называемых «естественной прокруткой») эффект обратный.
На большинстве мышей колесо прокрутки часто можно использовать как третью, среднюю кнопку мыши , нажав на нее , и это называется кнопкой прокрутки .
Колеса прокрутки некоторых мышей могут прокручиваться горизонтально, если наклонить их влево или вправо , или в другом месте мыши может быть расположено дополнительное колесо на перпендикулярной оси.
Колесо часто, хотя и не всегда, конструируется с фиксаторами для вращения дискретными шагами, а не непрерывно, как аналоговая ось, чтобы оператору было легче интуитивно понимать, насколько далеко он прокручивает.
Колеса прокрутки широко распространены на современных компьютерных мышах и стали неотъемлемой частью аппаратного интерфейса . Однако мыши без колесика все еще доступны.
Некоторые пользовательские интерфейсы, такие как Cinnamon (среда рабочего стола) , позволяют использовать его для регулировки яркости и громкости путем указания соответствующего значка на панели задач во время прокрутки.
Колесико мыши механически связано с вращательным энкодером (rotary encoder).
Когда пользователь прокручивает колесо, энкодер преобразует его движение в серию электрических импульсов, которые микроконтроллер мыши интерпретирует как команды «прокрутка вверх» или «прокрутка вниз».
На практике применяются два основных типа энкодеров:
Классификация по высоте между осью вращения и нижней частью
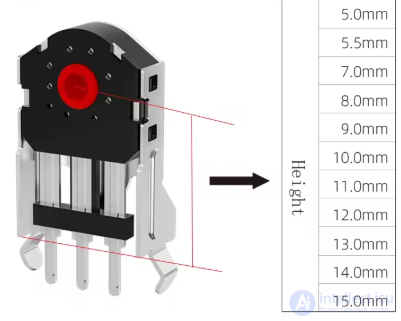
Классификация по физическому принципу работы
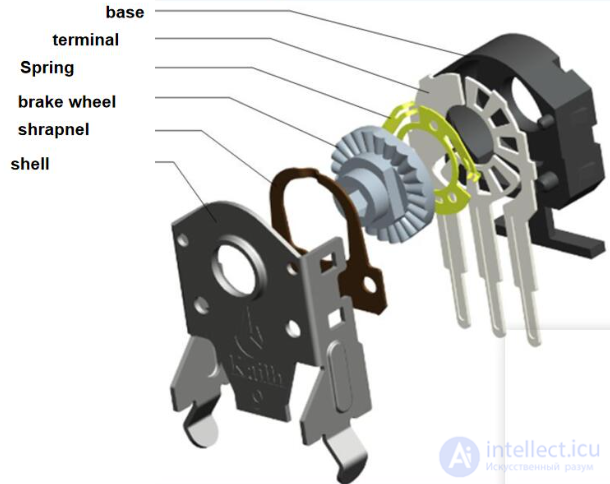
Самый распространенный и дешевый тип, применяемый в классических мышах.
Внутри колеса установлен металлический диск с прорезями и две контактные пружины.
При вращении диск замыкает и размыкает контакты, создавая серию импульсов с небольшой задержкой между каналами (A и B).
Контроллер определяет направление вращения по фазовому сдвигу между сигналами A и B.
Преимущества: простота, низкая цена.
Недостатки: износ контактов, «шум» (дребезг), ограниченный срок службы.
Характеристики механических энкодеров:

Используется в более дорогих или современных моделях.
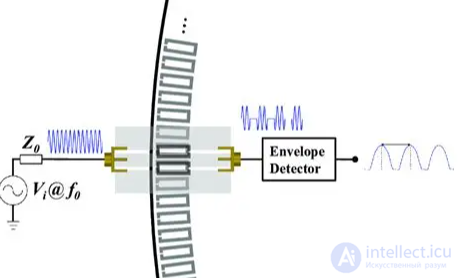
Вместо контактов применяются инфракрасный светодиод и фотодатчики.
На оси колеса закреплен прозрачный диск с прорезями.
При вращении луч света периодически прерывается, формируя импульсы, аналогичные механическому варианту.
Преимущества: долговечность, высокая точность, отсутствие механического износа.
Недостатки: более высокая стоимость, чувствительность к пыли.

Оптический поворотный инкрементальный энкодер — самое популярное устройство обратной связи по положению в современных сервосистемах. Оптические энкодеры крепят непрозрачную маску к ротору двигателя. При изменении положения ротора меняется форма светового пятна, проходящего через маску. Энкодер генерирует электронные импульсы, когда интенсивность света изменяется в пределах заданного значения. Оптическая маска предназначена для создания циклического шаблона изменения, повторяющегося сотни или тысячи раз за каждый оборот двигателя. В результате инкрементальный энкодер обычно выдает от 250 до 5000 отсчетов информации о положении за каждый оборот двигателя. Эти импульсы генерируются пропорционально расстоянию, пройденному энкодером. Импульсы подсчитываются системой управления для определения расстояния, пройденного ротором энкодера. Фазы A и B энкодера являются выходными сигналами поворотных энкодеров инкрементального типа. Сигнал фазы A выдает угол поворота вала до и после операции, а фаза B — выходной сигнал направления вращения вала.
Этот двухфазный поворотный энкодер AB с частотой 400 имп/об — оптический энкодер промышленного класса с квадратурными выходами для инкрементного счета. Он оснащен сплошным валом диаметром 6 мм для соединения с валом двигателя. Этот энкодер выдает 400 импульсов на оборот (имп/об) между фазами A и B. Энкодер поставляется с кабелем длиной 1,5 метра для подключения.
Функции:
Применение: широко используется в лифтах, серводвигателях, бумажном производстве, упаковочной промышленности, текстильной промышленности, полиграфии, компьютерных мышах и других отраслях.

Спецификация:
Используется реже, в премиум-мышах (например, Logitech MX Master).
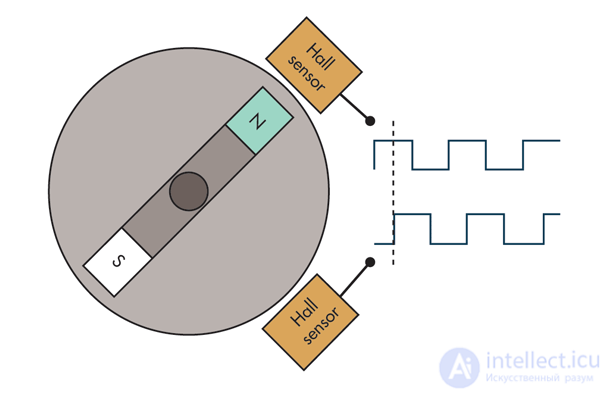
На оси колеса установлен постоянный магнит, а рядом — датчик Холла.
Датчик считывает изменение магнитного поля при вращении и формирует цифровой сигнал.
Преимущества: бесконтактность, надежность, высокая точность.
Недостатки: сложность и стоимость.
Энкодер имеет два выходных канала (A и B), сдвинутых по фазе на 90°.
Если сигнал A опережает B — прокрутка идет вперед (вверх).
Если B опережает A — прокрутка идет назад (вниз).
Такой метод называется квадратурным кодированием, а система — квадратурным энкодером (quadrature encoder).
Вращающиеся энкодеры преобразуют вращательное движение или угловое положение в аналоговые или цифровые сигналы для использования в системах измерения или управления. Их можно классифицировать различными способами, в первую очередь по типу выходного сигнала: абсолютный или инкрементальный.
Инкрементальный сигнал состоит из двух сдвинутых по фазе прямоугольных сигналов. Сдвиг по фазе необходим для определения направления вращения. Абсолютный сигнал состоит из дискретных кодированных двоичных значений и может иметь разрядность от 4 до 16 бит.
В практическом применении абсолютные энкодеры требуются, если требуется распознавать и получать доступ к данным заданной настройки после выключения системы. Во всех остальных случаях можно использовать инкрементальный энкодер. Энкодеры также можно классифицировать по используемой технологии датчиков, которые могут использовать механические контакты или, что более распространено в наши дни, бесконтактные оптические или магнитные датчики.
Область применения энкодеров чрезвычайно широка, включая бытовую, автомобильную, промышленную и медицинскую технику. По сути, энкодеры выполняют одну из двух функций: обеспечивают человеко-машинный интерфейс (HMI) или межмашинный интерфейс (MMI).
В приложениях HMI энкодеры часто встречаются в панелях управления, где их обычно рассматривают как цифровую версию потенциометра. Менее очевидное, но все более популярное применение — в узлах рычагов или педалей управления, заменяя механические тросы или тяги, например, в автомобильных системах управления дроссельной заслонкой.
В приложениях MMI энкодеры неизменно используются в составе систем управления с обратной связью, где они подсчитывают обороты шпинделя или контролируют скорость. Многие системы оснащены энкодерами, которые замыкают контур по входу HMI. Таким образом, в автомобильных системах управления дроссельной заслонкой второй энкодер, вероятно, измеряет частоту вращения двигателя (об/мин) для управления впрыском топлива и синхронизацией двигателя для достижения желаемого ускорения. Или он может измерять положение руля на судне, чтобы убедиться в его соответствии настройкам штурвала.
Как они работают?
Магнитные энкодеры используют комбинацию постоянных магнитов и магнитных датчиков для определения перемещения и положения. Типичная конструкция использует магниты, расположенные по краю роторного диска, закрепленного на валу и расположенного таким образом, чтобы датчик регистрировал изменения магнитного поля при прохождении через него чередующихся полюсов магнита.
Простейшая конфигурация включает один магнит, северный и южный полюса которого расположены на противоположных краях ротора, и один датчик. Такое устройство выдает синусоидальный сигнал с частотой, равной скорости вращения вала.
Благодаря второму датчику, установленному под углом 90° к первому и, следовательно, генерирующему косинусоидальный сигнал, становится возможным не только определять направление вращения, но и интерполировать абсолютное положение вала из синусоидального и косинусоидального сигналов (рис. 1). В инкрементальных энкодерах синусоидальные выходные сигналы датчиков преобразуются в прямоугольные, поэтому результирующие квадратурные сигналы могут быть закодированы только в одно из четырех возможных угловых положений. Более высокое разрешение достигается за счет увеличения числа магнитных полюсов вокруг ротора и использования большего количества датчиков. Например, 1024 позиции (или 10-битное разрешение) можно получить с помощью четырех датчиков и 128 полюсов.
1. Магнитный вращающийся энкодер состоит из двух полюсов и двух датчиков. Второй датчик позволяет не только определять направление вращения, но и интерполировать абсолютное положение вала.
Оптические энкодеры используют роторный диск из пластика или стекла с узором из прозрачных и непрозрачных областей, которые могут быть обнаружены при вращении диска между источником света и фотодетектором. Как и в случае магнитного энкодера, простейшая конфигурация может использовать только один датчик, при этом одна половина диска прозрачна, а другая — непрозрачна. Но для более высокого разрешения диск обычно делится на большее количество сегментов (часто в виде концентрических колец) двумя или более датчиками.
И снова, правильное расположение узора ротора и положения датчика может обеспечить квадратурный выходной сигнал, характерный для инкрементальных энкодеров. Для минимизации количества выводов данные с абсолютного энкодера обычно выводятся последовательно. И хотя большинство коммерческих энкодеров являются вращающимися, те же принципы измерения и кодирования могут быть применены и к линейным энкодерам.
Импульсы от энкодера поступают на микроконтроллер мыши, который:
Считывает частоту и направление вращения.
Преобразует их в команды HID-протокола USB.
Отправляет сигнал компьютеру в виде событий Scroll Up / Scroll Down.
С точки зрения пользователя, технология энкодера (магнитная или оптическая) важна только в том случае, если она определяет достигаемые характеристики. В частности, при использовании в составе человеко-машинного интерфейса (MMI) энкодер подвергается механическим нагрузкам и должен функционировать также при быстром вращении.
Следовательно, определив, требуется ли инкрементальное или абсолютное кодирование, ключевыми критериями выбора являются скорость вращения, измеряемая в об/мин, и угловое разрешение, выражаемое либо числом позиций на оборот, либо эквивалентным числом бит. Магнитные вращающиеся энкодеры
Конечно, если предполагаемое применение предполагает длительную эксплуатацию энкодера на высоких скоростях, целесообразно учитывать срок службы, то есть выбирать энкодер с подходящими высокопроизводительными шарикоподшипниками. Кроме того, следует учитывать обычные критерии качества, надежности и цены.
Со временем колесо прокрутки может работать нестабильно: пропуски, двойная прокрутка, «дребезг» или полное отсутствие реакции.
Причины зависят от типа энкодера — механического, оптического или магнитного.
Прокрутка «прыгает» — вверх-вниз без контроля.
Колесо реагирует не на каждый шаг.
Прокрутка работает только в одном направлении.
Внутри слышно нехарактерное шуршание или треск.
Колесо прокручивается слишком легко или, наоборот, туго.
Причина: пыль, грязь, износ металлических дорожек, влага.
Проявления: «плавающая» прокрутка, случайные импульсы.
Решение:
Разобрать мышь и корпус энкодера (аккуратно отогнув защелки).
Очистить диск и контакты ватной палочкой, смоченной в изопропиловом спирте (IPA).
При сильном износе — заменить энкодер полностью (совместимые модели: ALPS EC10E, TTC, Bourns и др.).
Причина: многолетнее использование (миллионы прокручиваний).
Проявления: колесо срабатывает с задержкой, «падает» в одном положении.
Решение:
Можно временно подогнуть контактные лепестки пинцетом.
Но долговременное решение — замена энкодера.
Причина: запыление прорезей на диске или слабое свечение ИК-светодиода.
Проявления: нестабильная работа прокрутки.
Решение:
Прочистить диск и оптический тракт мягкой кистью или спиртом.
Проверить наличие сигнала светодиода через камеру смартфона (виден слабый фиолетовый свет).
При необходимости заменить LED или сам модуль.
Причина: механическое повреждение при падении или сильном нажатии.
Проявления: колесо болтается или не вращает энкодер.
Решение:
Проверить, не сломана ли пластиковая втулка или ось.
При необходимости подклеить эпоксидной смолой или заменить колесо от аналогичной модели.
Причина: неудачный ремонт, коррозия, износ пайки.
Проявления: полное отсутствие реакции на вращение.
Решение:
Проверить мультиметром наличие сигнала на выводах энкодера (каналы A и B).
Пропаять контакты, восстановить дорожки тонким проводом.
Редкая, но возможная причина.
Если энкодер исправен, а прокрутка не работает — может быть поврежден вход микроконтроллера.
Решение:
Проверить энкодер отдельно на осциллографе.
Если микроконтроллер не реагирует — замена платы или всей мыши.
Не использовать агрессивные жидкости при чистке.
Избегать пыли и влажности.
1–2 раза в год очищать внутренности сжатым воздухом.
При первых признаках дребезга — чистка и смазка легким силиконовым маслом (только для механических моделей).
смазывать малом Литол или обычным швейным но есть риск замыкания и разрушения
Многие производители (Logitech, Razer, ASUS) постепенно переходят на магнитные или оптические энкодеры, чтобы избавиться от проблем дребезга и износа.
В таких системах программно имитируется «щелчковое» ощущение вращения, что повышает долговечность и точность прокрутки.
Первое колесо прокрутки с энкодером появилось в 1995 году в мыши Microsoft IntelliMouse.
С тех пор конструкция энкодеров почти не изменилась, но появились бесшумные и инерционные колеса, где используется программно регулируемое сопротивление вращению и магнитный датчик положения.
Колесо прокрутки мыши изобреталось множество раз разными людьми, не знавшими о работе других.
Другие элементы управления прокруткой мыши, а также использование колеса прокрутки для прокрутки, появились раньше, чем комбинация колеса и мыши. Самым ранним известным примером такого устройства является прототип Mighty Mouse, разработанный совместно компаниями NTT (Япония) и ETH Zürich (Швейцария) в 1985 году (Кунио Оно, Кэнъити Фукая и Юрг Нивергельт). На боковой стороне мыши располагалась комбинированная аналоговая кнопка / переключатель , управляемая большим пальцем , для плавной прокрутки.
На конференции ACM SIGCHI в 1989 году Джина Даниэль Венолия из Apple представила прототип мыши с горизонтальным колесиком для прокрутки или навигации внутрь и наружу: масштабирования или вдоль третьей оси в трехмерном пространстве . В ее патентной заявке от 1992 года указаны два вертикальных колесика: слева и справа от кнопки(кнопок).
В 1995 году тайваньская компания KYE Systems выпустила первую коммерческую мышь с колесом прокрутки. Она получила название Genius EasyScroll и также была доступна под названием Mouse Systems ProAgio .
Колесо прокрутки стало популярным благодаря Microsoft IntelliMouse в 1996 году, а поддержка колеса мыши появилась в Microsoft Office 97. Оно было основано на идеях, которые Эрик Михельман разрабатывал с 1993 года при участии Криса Грэма.
Колеса прокрутки также можно найти на КПК и мобильных телефонах, таких как ранние модели Sony , устройства BlackBerry и Nokia 7110 , которые обычно имеют функцию навигации по меню. Они также появились на клавиатурах , особенно на моделях Logitech и Microsoft , обычно располагаясь слева от клавиши Caps Lock
Вместо колеса прокрутки некоторые мыши (и другие устройства) используют альтернативный, но похожий компонент.
Ноутбуки часто оснащены сенсорной панелью , запрограммированной на управление жестами указателя , которые имитируют прокрутку колеса прокрутки (либо выделяя край панели для прокрутки, либо активируя прокрутку с помощью мультисенсорного жеста), либо имитируют нажатие кнопок колеса прокрутки (одновременное нажатие левой и правой кнопок для активации всенаправленной прокрутки). Многие дистрибутивы Linux предлагают метод прокрутки с помощью сенсорной панели, при котором пользователь сначала активирует режим прокрутки, нажимая на угол панели, а затем проводя пальцем по окружности вокруг ее центра; отпускание сенсорной панели вернет к режиму мыши по умолчанию.
В мышах альтернативами являются шарики прокрутки (похожие на трекболы , такие как на Mighty Mouse от Apple и некоторые последовательные или PS/2 мыши, которые совмещают горизонтальную и вертикальную прокрутку), указки интегрированные сенсорные панели (как на Magic Mouse от Apple ) или оптические датчики. Необычные примеры включают в себя джойстик-переключатель, присутствующий на ранней мыши Saitek и центральный 4-позиционный переключатель-клавиатуру, найденный на Cherry Power Pad Mouse M-1000. Genius также предлагал более простую NetMouse в конце 1990-х годов, у которой был двухпозиционный кулисный переключатель вместо колеса, продаваемый как Magic Scroll Button. Kensington в настоящее время предлагает несколько моделей мышей-трекеров с большим «кольцом прокрутки», которое окружает сам шарик и вращается с помощью нескольких пальцев вместо только указательного пальца, как на колесе прокрутки обычной мыши.
Некоторые ноутбуки ThinkPad позволяют прокручивать экран с помощью джойстика , удерживая кнопку над сенсорной панелью.
Исследование, описанное в статье про mouse wheel encoder , подчеркивает ее значимость в современном мире. Надеюсь, что теперь ты понял что такое mouse wheel encoder и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории электромеханические устройства электронных аппаратов

Комментарии