Лекция
Сразу хочу сказать, что здесь никакой воды про система управления, и только нужная информация. Для того чтобы лучше понимать что такое система управления, управляющая система, информационно-управляющая система, иус , настоятельно рекомендую прочитать все из категории Интеллектуальные информационные системы.
система управления — систематизированный (строго определенный) набор средств для управления подконтрольным объектом (объектом управления): возможно, сбора показаний о его состоянии, а также средств воздействия на его поведение, предназначенный для достижения заданных целей. Объектом системы управления могут быть как технические объекты, так и люди. Объект системы управления может состоять из других объектов, которые могут иметь постоянную структуру взаимосвязей.
Система управления управляет, командует, направляет или регулирует поведение других устройств или систем с помощью контуров управления . Он может варьироваться от простого контроллера отопления дома с термостатом, управляющего бытовым котлом, до крупных промышленных систем управления, которые используются для управления процессами или машинами.
Для непрерывно модулируемого управления используется контроллер обратной связи для автоматического управления процессом или операцией. Система управления сравнивает значение или состояние регулируемой переменной процесса (PV) с желаемым значением или уставкой (SP) и применяет разницу в качестве управляющего сигнала для приведения выходного параметра процесса установки к тому же значению, что и уставка.
Для последовательной и комбинационной логики используется программная логика , например, в программируемом логическом контроллере .
Автоматическое управление есть процесс, при котором воздействие на установку или устройство достигается посредством управляющих (командных) сигналов. Характерным признаком процесса управления является открытый путь прохождения соответствующих импульсов.
Посылаемые управляющим устройством сигналы воздействуют на машину или установку без текущей регистрации и корректировки процесса управления (рис.1). Так, при управлении подачей стол станка перемещается с помощью привода. Устанавливающим (регулирующим, управляющим) сигналом будет в данном случае напряжение UM для электродвигателя подачи. Последний образует вместе со столом станка так называемый объект управления. Подлежащим управлению параметром здесь является путь подачи s, который должен проходить стол данного станка.
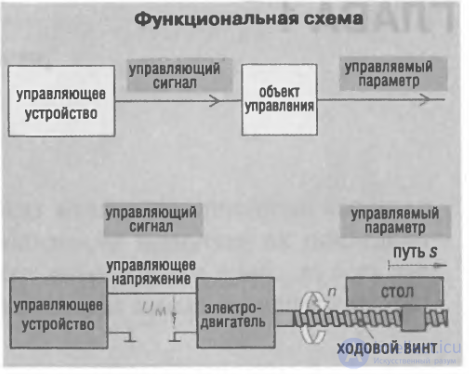
Рис. 1. Принцип управления на примере механизма подачи.
Под «управляющей системой» понимается вся установка, в которой и осуществляется собственно процесс управления. В функциональной схеме с использованием условных обозначений элементов и линий функциональных связей наглядно отображается взаимодействие отдельных блоков управления. При этом направление управляющего воздействия показано стрелками.
информационно-управляющая система (ИУС) — цифровая система контроля или управления некоторым реальным объектом.
Универсальными вычислительными системами (ВС) решаются задачи, не связанные с необходимостью принятия решения в реальном времени (расчет, моделирование, офисные задачи). Все остальные задачи попадают в область ИУС. Хотя разделение задач достаточно условно, ИУС, решающие разные задачи, имеют четко выраженную специфику.
Техническая структура управления — устройство или набор устройств для манипулирования поведением других устройств или систем.
Объектом управления может быть любая динамическая система или ее модель. Состояние объекта характеризуется некоторыми количественными величинами, изменяющимися во времени, то есть переменными состояния. В естественных процессах в роли таких переменных может выступать температура, плотность определенного вещества в организме, курс ценных бумаг и т. д. Для технических объектов это механические перемещения (угловые или линейные) и их скорость, электрические переменные, температуры и т. д. Анализ и синтез систем управления проводится методами специального раздела математики — теории управления.
Структуры управления разделяют на два больших класса:

Система автоматического управления, как правило, состоит из двух основных элементов — объекта управления и управляющего устройства.
Объект управления — изменение состояния объекта в соответствии с заданным законом управления. Такое изменение происходит в результате внешних факторов, например, вследствие управляющих или возмущающих воздействий.
Способны поддерживать экстремальное значение некоторого критерия (например, минимальное или максимальное), характеризующего качество функционирования данного объекта. Критерием качества, который обычно называют целевой функцией, показателем экстремума или экстремальной характеристикой, может быть либо непосредственно измеряемая физическая величина (например, температура, ток, напряжение, влажность, давление), либо КПД, производительность и др.
Выделяют:
Служат для обеспечения желаемого качества процесса при широком диапазоне изменения характеристик объектов управления и возмущений.
Следует различать два метода организации адаптации: поисковую адаптацию и адаптацию с индикацией объекта, то есть с экспериментальной оценкой его математической модели.
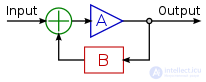
В замкнутых системах автоматического регулирования управляющее воздействие формируется в непосредственной зависимости от управляемой величины. Связь выхода системы с его входом называется обратной связью. Сигнал обратной связи вычитается из задающего воздействия. Такая обратная связь называется отрицательной. Может ли быть на оборот? Оказывается, да. В этом случае обратная связь называется положительной, она увеличивает рассогласование, то есть, стремится «раскачать» систему. На практике положительная обратная связь применяется, например, в генераторах для поддержания незатухающих электрических колебаний
Сущность принципа разомкнутого управления заключается в жестко заданной программе управления. То есть управление осуществляется «вслепую», без контроля результата, основываясь лишь на заложенной в САУ модели управляемого объекта. Примеры таких систем: таймер, блок управления светофора, автоматическая система полива газона, автоматическая стиральная машина и т. п.
В свою очередь, различают:
В зависимости от описания переменных системы делятся на линейные и нелинейные. К линейным относятся системы, состоящие из элементов описания, которые задаются линейными алгебраическими или дифференциальными уравнениями.
Если все параметры уравнения движения системы не меняются во времени, то такая система называется стационарной. Если хотя бы один параметр уравнения движения системы меняется во времени, то система называется нестационарной или с переменными параметрами.
Системы, в которых определены внешние (задающие) воздействия и описываются непрерывными или дискретными функциями во времени, относятся к классу детерминированных систем.
Системы, в которых имеет место случайные сигнальные или параметрические воздействия и описываются стохастическими дифференциальными или разностными уравнениями, относятся к классу стохастических систем.
Если в системе есть хотя бы один элемент, описание которого задается уравнением частных производных, то система относится к классу систем с распределенными переменными.
Системы, в которых непрерывная динамика, порождаемая в каждый момент времени, перемежается с дискретными командами, посылаемыми извне, называются гибридными системами.
В зависимости от природы управляемых объектов можно выделить биологические, экологические, экономические и технические системы управления. Об этом говорит сайт https://intellect.icu . В качестве примеров технического управления можно привести:
Под настройкой системы регулирования понимается перечень расчетных и экспериментальных работ, направленных на поиск настроечных параметров регулятора, обеспечивающих заданное качество регулирования, организацию и проведение натурных испытаний на действующем производстве или расчетных экспериментов для подтверждения оптимальности выбранных параметров. Доказательством оптимальности должны служить результаты работы регулятора для нескольких значений настроечных параметров, среди которых существуют оптимальные. Параметрами настройки являются их численные значения для конкретного регулятора, ограничения на диапазоны их вариации при поиске, а также критерии качества.
Понятие настройки системы регулирования является достаточно широким — все зависит от поставленной цели и условий настройки. При настройке любых систем регулирования особенно в теплоэнергетике следует учитывать внутреннюю противоречивость выполняемой работы.
Успех настройки регулятора зависит от полноты информации об объекте регулирования. В то же время наиболее полная и достоверная информация может быть получена во время работы системы. Поэтому практическую настройку всегда приходится начинать при дефиците информации и надо быть готовым ко всякого рода неожиданностям.
Однако в любом случае обеспечение устойчивости является обязательным необходимым требованием.
К результатам настройки могут быть предъявлены следующие требования, которые можно отнести к категории достаточных:
Приведенный перечень достаточных требований является списком этапов выполнения наладочных работ, которые надо выполнить для достижения максимального качества работы системы регулирования. Этапы могут быть выполнены сразу при пуске производства или разнесены во времени.
Основное назначение системы автоматического управления состоит в обеспечении заданного соответствия между входной и выходной координатами. В случае следящей системы входная координата должна быть равна выходной в любой момент времени. Поскольку автоматическая система работает на основе сравнения входной и выходной координат, такое равенство принципиально неосуществимо и можно лишь говорить о достаточно малой разности между входной и выходной координатами.
Существует два общих класса управляющего воздействия: разомкнутый и замкнутый. В системе управления без обратной связи управляющее воздействие контроллера не зависит от переменной процесса. Примером может служить котел центрального отопления, управляемый только таймером. Управляющим действием является включение или выключение котла. Переменной процесса является температура в здании. Этот контроллер управляет системой отопления в течение постоянного времени независимо от температуры в здании.
В системе управления с обратной связью управляющее действие контроллера зависит от желаемой и фактической переменной процесса. В случае аналогии с котлом, здесь будет использоваться термостат для контроля температуры в здании и обратный сигнал, чтобы гарантировать, что выход контроллера поддерживает температуру здания, близкую к той, которая установлена на термостате. Контроллер с обратной связью имеет контур обратной связи, который гарантирует, что контроллер выполняет управляющее действие для управления переменной процесса на том же значении, что и заданное значение. По этой причине контроллеры с обратной связью также называют контроллерами с обратной связью.
В случае систем с линейной обратной связью , контур управления, включающий датчики , алгоритмы управления и исполнительные механизмы, организован в попытке регулировать переменную при заданном значении (SP). Обычный пример - круиз-контроль на дорожном транспортном средстве; где внешние воздействия, такие как холмы, могут вызвать изменение скорости, и у водителя есть возможность изменить желаемую заданную скорость. Алгоритм ПИДА в контроллере восстанавливает фактическую скорость до требуемой скорости в оптимальном пути, с минимальной задержкой или перерегулированием , путем регулирования выходной мощности двигателя транспортного средства.
Системы управления, которые включают некоторое ощущение результатов, которых они пытаются достичь, используют обратную связь и могут в некоторой степени адаптироваться к различным обстоятельствам. Системы управления с обратной связью не используют обратную связь и работают только заранее установленными способами.
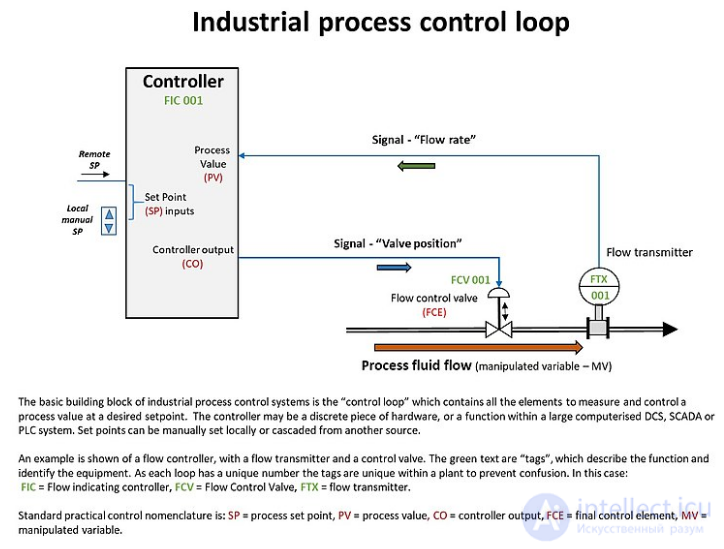
Пример единого промышленного контура управления; показывая непрерывно модулируемое управление технологическим потоком.
Системы логического управления для промышленного и коммерческого оборудования исторически реализовывались посредством взаимосвязанных электрических реле и кулачковых таймеров с использованием лестничной логики . Сегодня большинство таких систем построено на микроконтроллерах или более специализированных программируемых логических контроллерах (ПЛК). Обозначение релейной логики все еще используется в качестве метода программирования для ПЛК.
Логические контроллеры могут реагировать на переключатели и датчики и могут вызывать запуск и остановку оборудования при помощи исполнительных механизмов . Логические контроллеры используются для упорядочивания механических операций во многих приложениях. Примеры включают лифты, стиральные машины и другие системы с взаимосвязанными операциями. Система автоматического последовательного управления может запускать серию механических приводов в правильной последовательности для выполнения задачи. Например, различные электрические и пневматические преобразователи могут складывать и приклеивать картонную коробку, заполнять ее продуктом и затем запечатывать в автоматической упаковочной машине.
Программное обеспечение ПЛК может быть написано разными способами - с помощью релейных диаграмм, SFC ( последовательных функциональных схем ) или списков операторов .
В двухпозиционном управлении используется контроллер с обратной связью, который резко переключается между двумя состояниями. Простой биметаллический бытовой термостат можно описать как двухпозиционный контроллер. Когда температура в помещении (PV) опускается ниже пользовательской настройки (SP), обогреватель включается. Другой пример - реле давления на воздушном компрессоре. Когда давление (PV) падает ниже уставки (SP), компрессор включается. Холодильники и вакуумные насосы содержат аналогичные механизмы. Подобные простые двухпозиционные системы управления могут быть дешевыми и эффективными.
Системы линейного управления используют отрицательную обратную связь для выработки управляющего сигнала для поддержания регулируемой PV на желаемом SP. Существует несколько типов линейных систем управления с разными возможностями.
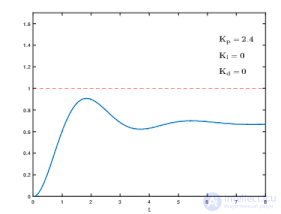
Пропорциональное управление - это тип системы управления с линейной обратной связью, в которой к регулируемой переменной применяется поправка, которая пропорциональна разнице между желаемым значением (SP) и измеренным значением (PV). Двумя классическими механическими примерами являются поплавковый пропорциональный клапан унитаза и шаровой регулятор .
Система пропорционального управления более сложна, чем система двухпозиционного управления, но проще, чем система пропорционально-интегрально-производного (ПИД) управления, используемая, например, в автомобильном круиз-контроле . Двухпозиционное управление будет работать для систем, которые не требуют высокой точности или скорости реакции, но неэффективны для быстрых и своевременных исправлений и ответов. Пропорциональное управление преодолевает это, модулируя управляемую переменную (MV), такую как регулирующий клапан , на уровне усиления, который позволяет избежать нестабильности, но применяет коррекцию настолько быстро, насколько это возможно, применяя оптимальную величину пропорциональной коррекции.
Недостатком пропорционального управления является то, что оно не может устранить остаточную ошибку SP – PV, так как требуется ошибка для генерации пропорционального выхода. Для решения этой проблемы можно использовать ПИ-регулятор . ПИ-регулятор использует пропорциональный член (P), чтобы удалить грубую ошибку, и интегральный член (I), чтобы исключить остаточную ошибку смещения, интегрируя ошибку во времени.
В некоторых системах существуют практические ограничения диапазона MV. Например, обогреватель имеет ограничение на количество тепла, которое он может производить, а клапан может открываться только на определенное время. Регулировки усиления одновременно изменяют диапазон значений ошибки, в котором MV находится между этими пределами. Ширина этого диапазона в единицах переменной ошибки и, следовательно, PV называется полосой пропорциональности (PB).
При контроле температуры в промышленной печи обычно лучше контролировать открытие топливного клапана пропорционально текущим потребностям печи. Это помогает избежать тепловых ударов и более эффективно передает тепло.
При низком коэффициенте усиления при обнаружении ошибок применяется лишь небольшое корректирующее действие. Система может быть безопасной и стабильной, но может работать медленно при изменении условий. Ошибки будут оставаться неисправленными в течение относительно длительных периодов времени, и система будет перегружена . Если пропорциональное усиление увеличивается, такие системы становятся более отзывчивыми, и ошибки устраняются быстрее. Когда говорят, что вся система критически демпфирована, существует оптимальное значение для настройки усиления . Увеличение коэффициента усиления контура за пределами этой точки приводит к колебаниям в PV, и такая система недостаточно демпфируется . Регулировка усиления для достижения критически демпфированного поведения известна как настройка системы управления.
В случае с недостаточным демпфированием печь быстро нагревается. Как только заданное значение будет достигнуто, накопленное тепло в подсистеме нагревателя и в стенках печи будет поддерживать повышение измеренной температуры сверх требуемого. После повышения температуры выше заданного значения температура падает, и, в конце концов, снова подается тепло. Любая задержка в повторном нагреве подсистемы нагревателя позволяет температуре печи опускаться ниже заданного значения, и цикл повторяется. Колебания температуры, которые производит система управления печью с недостаточным демпфированием, нежелательны.
В системе с критическим демпфированием, когда температура приближается к заданному значению, подвод тепла начинает уменьшаться, скорость нагрева печи успевает замедлиться, и система избегает перерегулирования. В системе с избыточным демпфированием также предотвращается перерегулирование, но система с избыточным демпфированием излишне медленно достигает начального значения уставки, реагируя на внешние изменения в системе, например открытие дверцы печи.
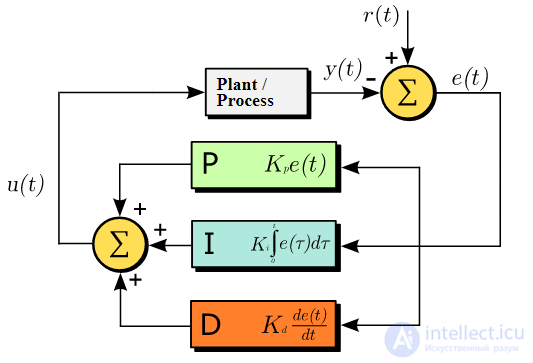
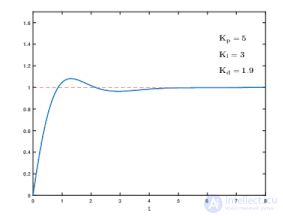
Чистые пропорциональные регуляторы должны работать с остаточной ошибкой в системе. Хотя ПИ-регуляторы устраняют эту ошибку, они все равно могут работать медленно или генерировать колебания. ПИД-регулятор устраняет эти последние недостатки, вводя производное (D) действие для сохранения стабильности при улучшении отзывчивости.
Производная связана со скоростью изменения ошибки во времени: если измеряемая переменная быстро приближается к заданному значению, то привод отключается раньше, чтобы позволить ему двигаться по инерции до требуемого уровня; И наоборот, если измеренное значение начинает быстро отклоняться от заданного значения, прилагаются дополнительные усилия - пропорционально этой скорости, чтобы помочь вернуть его обратно.
В системах управления, включающих управление движением тяжелого предмета, такого как пистолет или камера на движущемся транспортном средстве, производное действие хорошо настроенного ПИД-регулятора может позволить ему достигать и поддерживать заданное значение лучше, чем у большинства опытных операторов. Однако, если производное действие чрезмерно приложено, это может привести к колебаниям.
Интегральный член увеличивает влияние долговременных установившихся ошибок, прилагая все возрастающие усилия, пока ошибка не будет устранена. В приведенном выше примере печи, работающей при различных температурах, если прикладываемое тепло не доводит печь до заданного значения по какой-либо причине, интегральное действие все больше перемещает полосу пропорциональности относительно заданного значения, пока ошибка PV не снизится до нуля и заданное значение достигнуто.
Некоторые контроллеры включают возможность ограничения «% нарастания в минуту». Эта опция может быть очень полезной при стабилизации небольших котлов (3 MBTUH), особенно летом, при малых нагрузках. «Блок коммунального котла может потребоваться для изменения нагрузки со скоростью до 5% в минуту (IEA Coal Online - 2, 2007)».
Возможна фильтрация PV или сигнала ошибки. Это может помочь уменьшить нестабильность или колебания за счет уменьшения реакции системы на нежелательные частоты. Многие системы имеют резонансную частоту . Путем фильтрации этой частоты можно применить более сильную общую обратную связь до того, как возникнут колебания, что сделает систему более отзывчивой, не раскачиваясь.
Системы обратной связи можно комбинировать. При каскадном управлении один контур управления применяет алгоритмы управления к измеряемой переменной относительно заданного значения, но затем предоставляет изменяющееся заданное значение другому контуру управления, а не влияет напрямую на переменные процесса. Если в системе есть несколько различных измеряемых переменных, которые необходимо контролировать, для каждой из них будут использоваться отдельные системы управления.
Техника управления во многих приложениях создает системы управления, более сложные, чем ПИД-регулирование. Примеры таких областей применения : электронные системы управления самолетами, химические и нефтеперерабатывающие заводы. Модельные системы управления с прогнозированием разрабатываются с использованием специализированного программного обеспечения для автоматизированного проектирования и эмпирических математических моделей управляемой системы.
Нечеткая логика - это попытка применить простую конструкцию логических контроллеров к управлению сложными непрерывно изменяющимися системами. В принципе, измерение в системе с нечеткой логикой может быть частично верным.
Правила системы написаны на естественном языке и переведены в нечеткую логику. Например, конструкция печи должна начинаться со слов: «Если температура слишком высока, уменьшите количество топлива в печи. Если температура слишком низкая, увеличьте количество топлива в печи».
Измерения из реального мира (например, температура печи) фаззифицируются, а логика вычисляется арифметически, в отличие от булевой логики , а выходы де-фаззифицируются для управления оборудованием.
Когда надежный нечеткий план сводится к одному быстрому вычислению, он начинает напоминать обычное решение с обратной связью, и может показаться, что в нечетком дизайне нет необходимости. Однако парадигма нечеткой логики может обеспечить масштабируемость для больших систем управления, где традиционные методы становятся громоздкими или дорогостоящими в разработке.
Нечеткая электроника - это электронная технология, в которой используется нечеткая логика вместо двухзначной логики, обычно используемой в цифровой электронике .

Диспетчерская DCS, где информация об установке и средства управления отображаются на экранах компьютерной графики. Операторы сидят, так как они могут просматривать и контролировать любую часть процесса со своих экранов, сохраняя при этом обзор установки.

Панель управления гидравлического термопресса со специальным программным обеспечением для этой функции
Диапазон реализации - от компактных контроллеров, часто со специальным программным обеспечением для конкретной машины или устройства, до распределенных систем управления для управления промышленными процессами.
Логические системы и контроллеры обратной связи обычно реализуются с помощью программируемых логических контроллеров .
1) Что делают управляющие системы?
2) Укажите соответствие для всех 5 вариантов ответа:
ответы а)1; б) 3; в)1; г) 2; д)2;
Иерархическая система управления
Статью про система управления я написал специально для тебя. Если ты хотел бы внести свой вклад в развитие теории и практики, ты можешь написать коммент или статью отправив на мою почту в разделе контакты. Этим ты поможешь другим читателям, ведь ты хочешь это сделать? Надеюсь, что теперь ты понял что такое система управления, управляющая система, информационно-управляющая система, иус и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Интеллектуальные информационные системы
Ответы на вопросы для самопроверки пишите в комментариях, мы проверим, или же задавайте свой вопрос по данной теме.

 , где
, где 


Комментарии
Оставить комментарий
Интеллектуальные информационные системы
Термины: Интеллектуальные информационные системы