Лекция
Привет, мой друг, тебе интересно узнать все про исполнительные механизмы, тогда с вдохновением прочти до конца. Для того чтобы лучше понимать что такое исполнительные механизмы, исполнительное устройство, исполнительный элемент, актуатор, актюатор , настоятельно рекомендую прочитать все из категории Робототехника.
исполнительное устройство ( исполнительный элемент , актуатор , актюатор ) — функциональный элемент системы автоматического управления, который воздействует на объект управления, изменяя поток энергии или материалов, которые поступают на объект. Большинство исполнительных устройств имеет механический или электрический выход
Состоит из двух функциональных блоков: исполнительного устройства (если исполнительное устройство механическое, то его часто называют (исполнительный механизм) и регулирующего органа, например регулирующего клапана, и может оснащаться дополнительными блоками.
В теории автоматического управления под исполнительным устройством понимают устройство, передающее воздействие с управляющего устройства на объект управления. Иногда рассматривается как составная часть объекта управления. Управляющим устройством может быть любая динамическая система.
Входные и выходные сигналы исполнительных устройств, а также их методы воздействия на объект управления могут иметь различную физическую природу.
исполнительные механизмы являются теми средствами, с помощью которых роботы передвигаются и изменяют форму своего тела. Для того чтобы понять основные особенности конструкции исполнительных механизмов, необходимо вначале рассмотреть абстрактные понятия движения и формы, используя концепцию степени свободы. Как степень свободы мы будем рассматривать каждое независимое направление, в котором могут передвигаться либо робот, либо один из его исполнительных механизмов. Например, твердотельный свободно движущийся робот, такой как автономный подводный аппарат, имеет шесть степеней свободы; три из них, (х,у, z), определяют положение робота в пространстве, а три других — его угловую ориентацию по трем осям вращения, известную как качание (yaw), поворот (roll) и наклон (pitch). Эти шесть степеней свободы определяют кинематическое состояние или позу робота. Динамическое состояние
робота включает по одному дополнительному измерению для скорости изменения
каждого кинематического измерения.
Роботы, не являющиеся твердотельными, имеют дополнительные степени свободы внутри самих себя. Например, в руке человека локоть имеет одну степень свободы (может сгибаться в одном направлении), а кисть имеет три степени свободы (может двигаться вверх и вниз, из стороны в сторону, а также вращаться). Каждый из шарниров робота также имеет 1, 2 или 3 степени свободы. Для перемещения любого объекта, такого как рука, в конкретную точку с конкретной ориентацией необходимо иметь шесть степеней свободы. Рука, показанная на рисунке а), имеет точно шесть степеней свободы, создаваемых с помощью пяти поворотных шарниров, которые формируют вращательное движение, и одного призматического сочленения, который формирует скользящее движение. Чтобы убедиться в том, что рука человека в целом имеет больше шести степеней свободы, можно провести простой эксперимент: положите кисть на стол и убедитесь в том, что вы еще имеете возможность поворачивать руку в локте, не меняя положения кисти на столе. Манипуляторами, имеющими больше степеней свободы, чем требуется для перевода конечного исполнительного механизма в целевое положение, проще управлять по сравнению с роботами, имеющими лишь минимальное количество степеней свободы.

Рис Особенности конструкции манипулятора робота: станфордский манипулятор (Stanford Manipulator) — один из первых манипуляторов робота, в котором используются пять поворотных шарниров (R) и одно призматическое сочленение (V), что позволяет получить в целом шесть степеней свободы (а); траектория движения неголономного четырехколесного транспортного средства с рулевым управлением от передних колес (б)
В мобильных роботах количество степеней свободы не обязательно совпадает с количеством приводимых в действие элементов. Рассмотрим, например, обычный автомобиль: он может передвигаться вперед или назад, а также поворачиваться, что соответствует двум степеням свободы. В отличие от этого кинематическая конфигурация автомобиля является трехмерной — на открытой плоской поверхности можно легко перевести автомобиль в любую точку (х, у), с любой ориентацией (см. рисунок б). Таким образом, автомобиль имеет три эффективные степени свободы, но две управляемые степени свободы. Робот называется неголономным, если он имеет больше эффективных степеней свободы, чем управляемых степеней свободы, и голономным, если эти два значения совпадают. Голономные роботы проще в управлении (было бы намного легче припарковать автомобиль, способный двигаться не только вперед и назад, но и в стороны), однако голономные роботы являются также механически более сложными. Большинство манипуляторов роботов являются голономными, а большинство мобильных роботов — неголономными.
В мобильных роботах применяется целый ряд механизмов для перемещения в пространстве, включая колеса, гусеницы и ноги. Роботы с дифференциальным приводом оборудованы расположенными с двух сторон независимо активизируемыми колесами (или гусеницами, как в армейском танке). Если колеса, находящиеся с обеих сторон, вращаются с одинаковой скоростью, то робот движется по прямой. Если же они вращаются в противоположных направлениях, то робот поворачивается на месте. Альтернативный вариант состоит в использовании синхронного привода, в котором каждое колесо может вращаться и поворачиваться вокруг вертикальной оси. Применение такой системы привода вполне могло бы привести к хаотическому перемещению, если бы не использовалось такое ограничение, что все пары колес поворачиваются в одном направлении и вращаются с одинаковой скоростью. И дифференциальный, и синхронный приводы являются неголономными. В некоторых более дорогостоящих роботах используются голономные приводы, которые обычно состоят из трех или большего количества колес, способных поворачиваться и вращаться независимо друг от друга.
Ноги, в отличие от колес, могут использоваться для передвижения не по плоской поверхности, а по местности, характеризующейся очень грубым рельефом. Тем не менее на плоских поверхностях ноги как средства передвижения значительно уступают колесам, к тому же задача создания для них механической конструкции является очень сложной. Исследователи в области робототехники предприняли попытки разработать конструкции с самым разным количеством ног, начиная от одной ноги и заканчивая буквально десятками. Были разработаны роботы, оборудованные ногами для ходьбы, бега и даже прыжков (как показано на примере шагающего робота на рисунке а). Этот робот является динамически устойчивым; это означает, что он может оставаться в вертикальном положении, только непрерывно двигаясь. Робот, способный оставаться в вертикальном положении, не двигая ногами, называется статически устойчивым. Робот является статически устойчивым, если центр его тяжести находится над многоугольником, охваченным его ногами.
В мобильных роботах других типов для передвижения используются иные, чрезвычайно разнообразные механизмы. В летательных аппаратах обычно применяются пропеллеры или турбины. Роботизированные дирижабли держатся в воздухе за счет тепловых эффектов. В автономных подводных транспортных средствах часто используются подруливающие устройства, подобные тем, которые устанавливаются на подводных лодках.
Для того чтобы робот мог функционировать, ему недостаточно быть оборудованным только датчиками и исполнительными механизмами. Полноценный робот должен также иметь источник энергии для привода своих исполнительных механизмов. Для приведения в действие манипулятора и для передвижения чаще всего используются электродвигатели; определенную область применения имеют также пневматические приводы, в которых используется сжатый газ, и гидравлические приводы, в которых используется жидкость под высоким давлением. Кроме того, в большинстве роботов имеются некоторые средства цифровой связи наподобие беспроводной сети. Наконец, робот должен иметь жесткий корпус, на который можно было бы навесить все эти устройства, а также, фигурально выражаясь, держать при себе паяльник, на тот случай, что его оборудование перестанет работать.

Рис 2 Примеры роботов, передвигающихся с помощью ног:
один из шагающих роботов Марка Рэйберта (Marc Raibert) в движении (а);
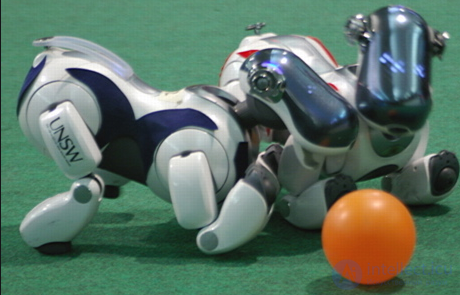
роботы AIBO компании Sony, играющие в футбол (б)
Один из вариантов классификации исполнительных элементов САУ представлен на рис.3.
В зависимости от управляющего воздействия на выходе ИЭ делятся на два вида: силовые и параметрические. Об этом говорит сайт https://intellect.icu . Изменение пространственного положения РО возможно в том случае, если ИЭ создают управляющее воздействие в виде силы или момента. Такие ИЭ получили название силовых. К ним относятся электромагниты, электромеханические муфты, различные виды двигателей.
Например, в системе автоматического управления полетом летательного аппарата по высоте ИЭ является двигатель, изменяющий положение руля высоты при отклонении действительного значения высоты от заданного. Устройство, содержащее двигатель, редуктор и элементы управления двигателем (усилитель, реле, контактор, золотниковый распределитель и т.п.), называют силовым приводом, или просто приводом. В зависимости от вида энергии, подводимой к двигателю, различают электро-, пневмо- и гидроприводы. Находят применение и комбинированные приводы: электрогидравлический и пневмогидравлический.
Еще одним вариантом ИЭ является следящий привод, который воспроизводит на выходе заданное на входе перемещение, но с большим механическим усилием, т.е. момент или сила на выходе его существенно больше, чем на входе. Следящий привод широко применяется в автоматических манипуляторах (роботах), станках с числовым программным управлением (ЧПУ), для управления прокатными станами, антеннами радиолокаторов, в космической и ракетной технике и т.д.
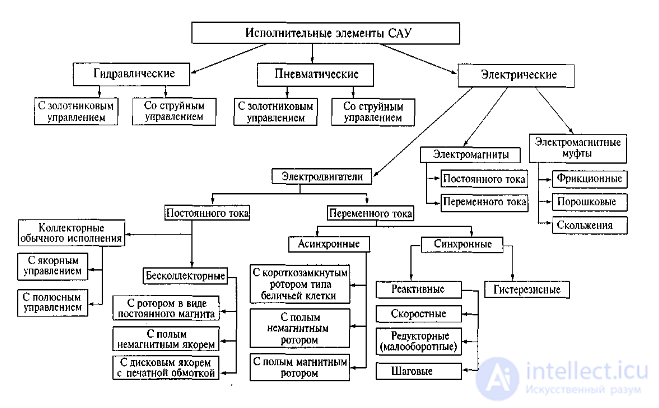
Рис.3. Один из вариантов классификации исполнительных элементов САУ
Следящий привод является частным случаем следящих систем. Формально этот привод относится не к элементам автоматики, а к устройствам, так как в нем объединяются несколько элементов. Но в сложных (комплексных) САУ привод может рассматриваться как один функциональный элемент — исполнительный.
Изменение состояния РО связано с изменением его параметров (сопротивления, магнитного потока, температуры, скорости и т.п.) или параметров энергии, подводимой к нему (напряжения, тока, частоты, фазы — в электрических устройствах; давления рабочей среды — в пневматических и гидравлических устройствах).
Исполнительные элементы, изменяющие состояние РО, называются параметрическими. Например, в автоматическом управляющем устройстве термостата ИЭ является усилитель, нагрузкой которого служит нагревательный элемент РО термостата. При отклонении температуры от заданного значения изменяется входное напряжение усилителя; при этом изменяется и выходное напряжение, а следовательно, и ток в нагревательном элементе и температура в термостате. В этом устройстве усилитель совмещает в себе функции и усилителя, и ИЭ. Он создает управляющее воздействие (напряжение, ток), изменяющее температуру нагревательного элемента, например РО. Такое использование усилителей довольно часто встречается в устройствах автоматики. Усилители одновременно являются основным видом параметрических ИЭ.
Особенно часто в качестве параметрических ИЭ используются электромагнитные реле, контакторы, тиристорные и транзисторные реле.
Силовые ИЭ в зависимости от характера движения их выходного вала можно разделить на три вида: с линейным, поворотным (угол поворота меньше 360°) и вращательным (угол поворота больше 360°) движениями. Статистическая характеристика ИЭ может быть линейной, нелинейной, реверсивной, нереверсивной и т.д.
К силовым ИЭ предъявляется ряд требований, которые обусловлены конструкцией и алгоритмом работы ОУ, условиями эксплуатации и т.п. Основными требованиями, которым должны удовлетворять характеристики и параметры ИЭ, являются следующие:
В зависимости от применяемой энергии, которая необходима для совершения определенного действия исполнительные устройства бывают электрического, пневматического или гидравлического характера. Наиболее часто используются электрические, а также пневматические элементы.
Электрические, из особенностей функционирования, бывают электродвигательными и электромагнитными.

Пневматические, исходя из особенностей функционирования, бывают поршневыми, сильфоными и мембранными.
Гидравлические, исходя из особенностей функционирования, бывают кривошипными, мембранными, поршневыми и с гидромуфтами.

В пневматических устройствах сила движения обеспечивается благодаря созданию давления сжатых воздушных масс, которое действует на сильфон, поршень либо мембрану. Чаще давление составляет не более 100 кПа.
В гидравлических устройствах сила движения обеспечивается благодаря созданию давления жидкости, которое действует на мембрану, поршень либо лопасть. Чаще давление составляет от 2 до 20 кПа. Отдельной категорией можно вынести устройства с гидромуфтами.
Мембранные и поршневые механизмы, как в гидравлических, так и в пневматических устройствах могут быть беспружинными и пружинными. Во втором случае сила движения в прямом направлении обеспечивается образованным давлением в рабочем органе, при обратном перемещении в действие приводится сжатая пружина со своей упругой силой. В беспружинных устройствах сила движения обеспечивается перепадом давлений на рабочем органе, что дает возможность механизму двигаться в обе стороны.


Электромагнитные механизмы дискретного характера производятся с применением электрических магнитов и постоянных магнитов. Для обеспечения упругости и жесткости соединений узлов используются всевозможные электромуфты.
Регулирующие органы могут быть самых разных видов, во многом они определяются объектами управления. К примеру, можно назвать главные виды регулирующих органов, используемых в агрегатах для направления и перемещения газа, песка или масла. По степени действия на конкретный объект они могут быть дозирующего и дросселирующего устройства.
Дросселирующие агрегаты работают благодаря возможности изменения сопротивления, к примеру, гидравлического или воздушного. Обеспечивается это благодаря изменению проходного сечения. В качестве примера можно привести клапана, задвижки, заслонки и тому подобное.
Дозирующие агрегаты работают благодаря возможности дозировать количество принимаемого вещества либо энергии в соответствии с требуемыми показателями. В качестве примера можно привести дозаторы, компрессоры, усилители мощности, насосы.
Электрические системы предполагают наличие электромашинных и электромагнитных структур. В качестве основы электромашинного механизма выступает электродвижок переменного либо постоянного тока. Их также именуют электроприводами.
Регулируемые механизмы могут менять свою скорость в зависимости от пришедшей команды от управляющего устройства. Нерегулируемые механизмы работают только с заранее заданной рабочей скоростью. Ее можно менять только возмущающими воздействиями.
Электрическим исполнительным механизмом в системах управления обычно называют устройство, предназначенное для перемещения рабочего органа в соответствии с сигналами, поступающими от управляющего устройства.
Рабочими органами могут быть различного рода дроссельные заслонки, клапаны, задвижки, шиберы, направляющие аппараты и другие регулирующие и запорные органы, способные производить изменение количества энергии или рабочего вещества, поступающего в объект управления. При этом перемещение рабочих органов может быть как поступательным, так и вращательным в пределах одного или нескольких оборотов. Следовательно, исполнительный механизм с помощью рабочего органа осуществляет непосредственное воздействие на управляемый объект.
Исполнительные механизмы — это устройства, механически воздействующие на физические процессы путем преобразования электрических сигналов в требуемое управляющее воздействие. Аналогично датчикам, исполнительные механизмы должны быть подобраны соответствующим образом для каждой задачи. Исполнительные механизмы могут быть бинарными, дискретными или аналоговыми. Конкретный тип для каждой задачи выбирается с учетом необходимой выходной мощности и быстродействия.
В общем случае электрический исполнительный механизм состоит из электропривода, редуктора, узла обратной связи, датчика указателя положения выходного элемента и конечных выключателей.
В качестве электропривода в исполнительных механизмах используются либо электромагниты, либо электродвигатели с понижающим редуктором для снижения скорости перемещения выходного элемента до величины, обеспечивающей возможность непосредственного соединения этого элемента (вала или штока) с рабочим органом.
Узлы обратной связи предназначены для введения в контур регулирования воздействия, пропорционального величине перемещения выходного элемента исполнительного механизма, а следовательно, и сочлененного с ним рабочего органа. С помощью конечных выключателей производится отключение электропривода исполнительного механизма при достижении рабочим органом своих конечных положений во избежание возможных повреждений механических звеньев, а также для ограничения перемещения рабочего органа.
Как правило, мощность сигнала, вырабатываемого регулирующим устройством, бывает недостаточной для непосредственного перемещения рабочего органа, поэтому исполнительный механизм можно рассматривать как усилитель мощности, в котором слабый входной сигнал, усиливаясь во много раз, передается на рабочий орган.
Все электрические исполнительные механизмы, нашедшие широкое применение в самых различных отраслях современной техники автоматизации производственных процессов, можно разделить на две основные группы:
1) электромагнитные
2) электродвигательные.
К первой группе относятся прежде всего соленоидные электроприводы, предназначенные для управления различного рода регулирующими и запорными клапанами, вентилями, золотниками и т. п. Сюда же можно отнести исполнительные механизмы с различными видами электромагнитных муфт. Характерная особенность электрических исполнительных механизмов этой группы состоит в том, что необходимое для перестановки рабочего органа усилие создается за счет электромагнита, являющегося неотъемлемой частью исполнительного механизма.
Для целей регулирования соленоидные механизмы обычно применяются только в системах двухпозиционного регулирования. В системах автоматического управления в качестве исполнительных элементов часто используются электромагнитные муфты, которые подразделяются на муфты трения и муфты скольжения.
Ко второй, наиболее распространенной в настоящее время группе относятся электрические исполнительные механизмы с электродвигателями различных типов и конструкций.

Электродвигательные исполнительные механизмы обычно состоят из двигателя, редуктора и тормоза (последнего иногда может и не быть). Сигнал управления поступает одновременно к двигателю и тормозу, механизм растормаживается и двигатель приводит в движение выходной орган. При исчезновении сигнала двигатель выключается, а тормоз останавливает механизм. Простота схемы, малое число элементов, участвующих в формировании регулирующего воздействия, и высокие эксплуатационные свойства сделали исполнительные механизмы с управляемыми двигателями основой для создания исполнительных устройств современных промышленных систем автоматического регулирования.
Существуют, хотя и не получили широкого распространения, исполнительные механизмы с неуправляемыми двигателями, которые содержат управляемую электрическим сигналом механическую, электрическую либо гидравлическую муфту. Характерной их особенностью является то, что двигатель в них работает непрерывно все время работы системы регулирования, а сигнал управления от регулирующего прибора передается рабочему органу через управляемую муфту
 Исполнительные механизмы с управляемыми двигателями в свою очередь можно разделить по способу построения системы управления на механизмы с контактным и бесконтактным управлением.
Исполнительные механизмы с управляемыми двигателями в свою очередь можно разделить по способу построения системы управления на механизмы с контактным и бесконтактным управлением.
Включение, отключение и реверсирование электродвигателей исполнительных механизмов с контактным управлением производится с помощью различной релейной или контактной аппаратуры. Это определяет основную отличительную особенность исполнительных механизмов с контактным управлением: у таких механизмов скорость выходного органа не зависит от величины управляющего сигнала, подаваемого на вход исполнительного устройства, а направление перемещения определяется знаком (или фазой) этого сигнала. Поэтому исполнительные механизмы с контактным управлением относят обычно к исполнительным устройствам с постоянной скоростью перемещения рабочего органа.
Для получения средней переменной скорости перемещения выходного органа исполнительного механизма при контактном управлении широко используется импульсный режим работы его электродвигателя.
В большинстве исполнительных механизмов, предназначенных для работы в схемах с контактным управлением, используются реверсивные электродвигатели. Применение электродвигателей вращающихся только в одну сторону, весьма ограничено, но все же имеет место.
Бесконтактные электрические исполнительные механизмы отличаются повышенной надежностью и позволяющие относительно просто получать как постоянную, так и переменную скорость перемещения выходного органа. Для бесконтактного управления исполнительными механизмами используются электронные, магнитные или полупроводниковые усилители, а также их сочетание. При работе управляющих усилителей в релейном режиме скорость перемещения выходного органа исполнительных механизмов постоянна.
Как электрические исполнительные механизмы с контактным управлением, так и бесконтактные можно подразделять также по следующим признакам.
По назначению: с вращательным движением выходного вала — одиооборотные; с вращательным движением выходного вала — многооборотпые; с поступательным движением выходного вала — прямоходпые.
По характеру действия: позиционного действия; пропорционального действия.
По исполнению: в нормальном исполнении, в специальном исполнении (пылеводозащищенном, взрывозащищениом, тропическом, морском и т. п.).
Выходной вал однооборотных исполнительных механизмов может вращаться в пределах одного полного оборота. Такие механизмы характеризуются величиной крутящего момента на выходном валу и временем его полного оборота.
В отличие от однооборотных многооборотные механизмы, выходной вал которых может осуществлять перемещение в пределах нескольких, иногда значительного количества, оборотов, характеризуются также полным числом оборотов выходного вала.

Прямоходные механизмы имеют поступательное движение выходного штока и оцениваются усилием на штоке, величиной полного хода штока, временем его перемещения на участке полного хода и по скорости движения выходного органа в оборотах в минуту для однооборотных и многооборотных и в миллиметрах в секунду для прямоходных механизмов.
Конструкция исполнительных механизмов позиционного действия такова, что с их помощью рабочие органы можно устанавливать только в определенные фиксированные положения. Чаще всего таких положений бывает два: «открыто» и «закрыто». В общем случае возможно существование и многопозиционных механизмов. Исполнительные механизмы позиционного действия обычно не имеют устройств для получения сигнала обратной связи по положению выходного органа.
Исполнительные механизмы пропорционального действия конструктивно таковы, что обеспечивают в заданных пределах установку рабочего органа в любое промежуточное положение в зависимости от величины и длительности управляющего сигнала. Подобные исполнительные механизмы могут использоваться как в позиционных, так и в П, ПИ и ПИД-системах автоматического регулирования.
Существование электрических исполнительных механизмов как нормального, так и специальных исполнений в значительной мере расширяет возможные области их практического применения.
Если я не полностью рассказал про исполнительные механизмы? Напиши в комментариях Надеюсь, что теперь ты понял что такое исполнительные механизмы, исполнительное устройство, исполнительный элемент, актуатор, актюатор и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Комментарии
Оставить комментарий
Робототехника
Термины: Робототехника