Лекция
Сразу хочу сказать, что здесь никакой воды про балансирующий робот, и только нужная информация. Для того чтобы лучше понимать что такое балансирующий робот, пид-регулятор , настоятельно рекомендую прочитать все из категории Робототехника.
В статье рассматривается задача управления двухколесным балансирующим роботом. Исследованы преимущества и существующие применения для данного типа роботов. Сделан обзор реализованных систем, их назначений и особенностей. Разработана версия робота, позволяющей сохранять баланс на
месте.
Введение
Начало робототехнике было положено в 60-х годах прошлого столетия, когда в связи с бурным ростом промышленного производства и достижений в электронике, оказалось возможным создать автомат для нужд конвейерной сборки потребительских товаров. С тех пор применение роботов значительно расширилось и вышло за рамки производственных нужд. С началом нового тысячелетия робототехника активно внедряется во все сферы деятельности человека, в том числе и в обыденную жизнь.
Традиционный робот, взаимодействующий с человеком, имеет широкое основание и передвигается с малыми ускорениями во избежание потери устойчивости. Центр масс подобных мобильных колесных роботов стараются расположить как можно ближе к поверхности, по которой осуществляется движение, при этом для устойчивости у робота
всегда имеется как минимум 3 точки опоры.
Двухколесные балансирующие роботы имеют меньшее основание за счет отсутствия требования статической устойчивости. Колесная пара позволяет совершать поворот на месте,
что дает им большую мобильность. Также, роботы подобной конструкции имеют пониженное энергопотребление.
В данной работе рассматривается относительно новая область для мобильных изначально неустойчивых роботов – удержание равновесия и передвижение за счет смещающегося центра тяжести. Эта особенность позволяет создать мобильного
двухколесного робота, способного удерживать равновесие на месте с одновременным
перемещением его отдельных частей (манипуляторов).
Подобные роботы могут использоваться как мобильные помощники рабочего, имеющие в арсенале различные инструменты и способные выполнять некритичную работу по указанию оператора с помощью систем дополненной реальности; в качестве управляемых вручную погрузчиков, картографировать помещения, опасные для человека, работать в качестве охранников (мобильных видеокамер), инвалидных колясок и индивидуальных
средств передвижения для человека.
Хотя первый двухколесный
балансирующий робот был сделан Казуо Ямафуджи в 1986 году, большинство подобных роботов было создано в 2003-2012 годах Методы и средства управления подобными двухколесными балансирующими роботами являются крайне важными для практической робототехники и позволяют строить на их основе системы автоматического управления любыми мехатронными системами.
1. Обзор существующих решений
Рассмотрим основные конструктивные, структурно-функциональные особенности, а также области применения существующих балансирующих двухколесных роботов.
nBot (рис. 1) использует акселерометр для получения значения угла наклона и гироскоп для получения скорости изменения угла наклона. Используется фильтр Вайнера (Weiner) для объединения сигналов этих двух сенсоров в один. Формула балансировки: На двигатель подается напряжение, пропорциональное углу наклона , угловой скорости , положению шасси и его скорости .
Поворот осуществляется за счет добавления значения напряжения к одному двигателю, и вычитания его из другого. Таким образом, робот может поворачивать, сохраняя
баланс. Движение по прямой осуществляется с помощью добавления значения к углу баланса .
JOE (рис. 2) разрабатывался как мини-прототип транспортного средства для перевозки людей. Для стабилизации используется регулятор пространства состояний, который получает информацию от гироскопа и энкодеров двигателей .
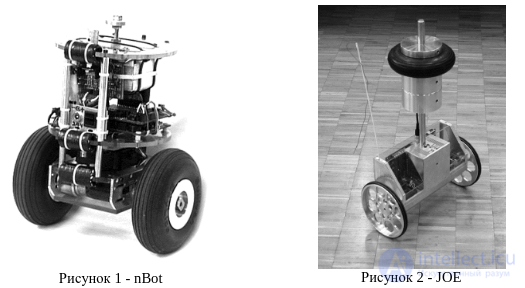
Рисунок 1 - nBot Рисунок 2 - JOE
Робот, созданный Питером Миллером (Peter Miller) получает значение о положении шасси с помощью энкодеров двигателей, значение скорости с помощью дифференцирования значения положения. Гироскоп и акселерометр, объединенные фильтром Калмана позволяют получить точное значение скорости и угла наклона без потери точности со временем. Управление происходит за счет нелинейной системы на нечеткой логике, распределяющей
сигналы управления на двигатель каждого из колес .

Ballbot (рис. 3) – робот, балансирующий на шаре. Разрабатывался для взаимодействия с людьми. Система управления (рис. 4) представляет собой два контура: внутренняя – PI регулятор, внешняя – линейно-квадратичный регулятор .
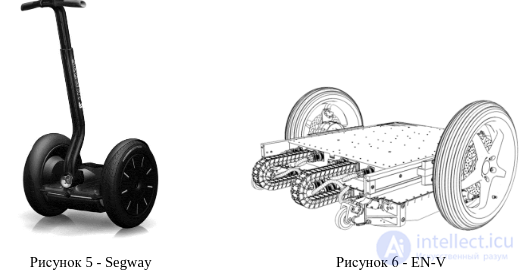
Segway (рис. 5) – коммерчески доступная платформа, использующаяся в качестве транспорта на относительно небольшие расстояния в различных областях, начиная от туризма и заканчивая полицейскими патрулями. EN-V (рис. 6) – Концепт двухколесного автомобиля, разработанный компанией Segway совместно c General Motors. В отличие от других неустойчивых двухколесных роботов, управление осуществляется за счет перемещения груза, которое приводит к смещению центра тяжести относительно колесной оси .
В большинстве роботов угол наклона рассчитывается путем интегрирования величины угловой скорости, полученной с помощью гироскопа и корректируется последовательным приближением к углу, вычисленному из показаний акселерометров. Об этом говорит сайт https://intellect.icu . Одновременно все параметры обрабатываются фильтром Калмана.
На первом этапе целью разработки является автономный двухколесный балансирующий робот без движущихся частей с двумя степенями свободы (рис. 7). Колеса соосны, питание осуществляется с помощью аккумуляторного блока. Центр тяжестинаход ится выше оси колес. Задача – балансировать около положения равновесия. Получение информации о положении осуществляется с помощью гироскопа и двухосевого акселерометра. Энкодеры валов двигателей позволят измерить скорость и направление движения робота. Дополнительная информация может получаться от 4 видеокамеры, установленной на роботе и следящей за угловым отклонением от заранее определенного визуального ориентира. Управляющие сигналы, получаемые от микропроцессора, поступают на драйверы двигателей, преобразующие в дальнейшем их в моменты двигателей.
Дополнительно на робота устанавливается система смещения центра тяжести, преобразующая вращательное движение двигателя 1 в линейное перемещение с помощью реечной передачи 2 грузу 3, в качестве которого может выступать блок питания (рис. 8).
Подобная система может также использоваться для смещения центра тяжести в вертикальной плоскости. Вместе эти средства могут понадобиться при изучении поведения
системы управления при смещениях центра масс в разных направлениях и ее дальнейшем
улучшении.
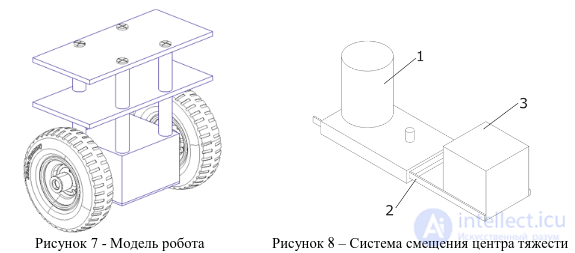
Рисунок 7 - Модель робота Рисунок 8 – Система смещения центра тяжести
В данной работе используется абстракция , позволяющая упростить реальную систему с 5-ю степенями свободы до системы с 2-мя степенями (рис. 9).
Эта модель представляет собой тележку с одной степенью свободы (движение вдоль оси x) с закрепленным на ней с помощью шарнира шеста, способного вращаться в вертикальной плоскости. Контроллер может действовать на тележку силой F, этим изменяя ее горизонтальное положение. В системе отсутствует трение. Масса тележки –  , масса шеста –
, масса шеста – , длина –
, длина – . Переменная – x положение тележки вдоль оси x,
. Переменная – x положение тележки вдоль оси x, – отклонение шеста от вертикального положения.
– отклонение шеста от вертикального положения.
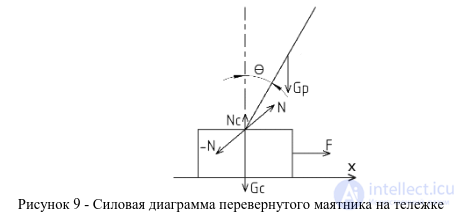
Рисунок 9 - Силовая диаграмма перевернутого маятника на тележке
Динамические уравнения данной системы:5
Угловое ускорение: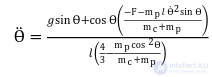
Горизонтальное ускорение: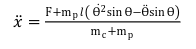
На оси обоих колес устанавливаются втулки 1, позволяющие зафиксировать робота и тем самым избавиться от лишних степеней свободы и обеспечить измеряемость угла наклона робота. Одна из втулок с одной вращательной осью свободы закрепляется шарнирно в каретке датчика измерения угла поворота 2, а вал самого датчика крепится к шасси робота с помощью крепления 3 (рис. 10, б).
Альтернативный способ измерения угла наклона – установка видеокамеры 2, сравнивающей положение робота с горизонтальным ориентиром 1, где 3 – вертикальная ось робота, связанная с его отклонением от положения равновесия. (рис.10, в).Эксперимент заключ ается в выведении робота из состояния равновесия для
определения качества системы управления. Переменным параметром в данной
конфигурации также служит вертикальное положение центра масс робота (рис. 10, а).
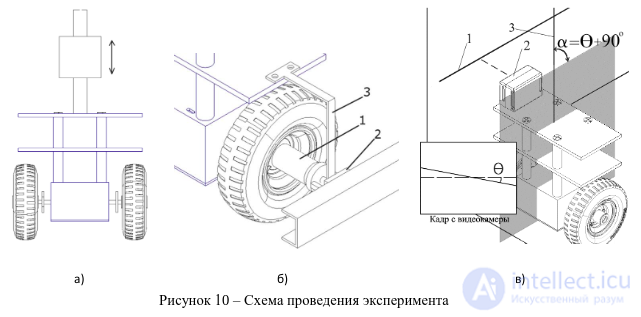
Рисунок 10 – Схема проведения эксперимента
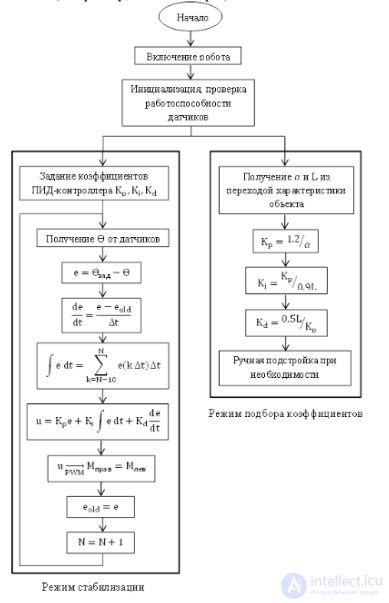
Подбор коэффициентов
пид-регулятор а происходит по методу Зиглера-Никольса.Происходит определение переменных L и α из переходной характеристики объекта. Постоянные устанавливаются в соответствии с формулами, приведенными в и донастраиваются вручную при необходимости.
Режим стабилизации начинается с получения значения угла наклона Ө от фильтра Калмана. Находится ошибка e, вычисляются интегральные и дифференциальные составляющие, где ∆t – интервал дискретизации, определяемый быстродействием микроконтроллера, k – номер промежутка времени. Полученный сигнал управления преобразуется с помощью ШИМ и поступает через приводы на двигатели с образованием моментов . Значения ошибки записывается в память для использования в нахождении составляющих сигнала управления в последующих итерациях (рис. 11).6
В статье рассмотрена задача управления двухколесным балансирующим роботом.Исследованы преимущества применения данного типа роботов, а также возможность использования системы контролируемого смещения положения центра тяжести. Сделаноб зор существующих систем.
Разработана версия робота с ограниченным количеством степеней свободы, способного балансировать вокруг вертикального положения равновесия.
Дальнейшая работа над проектом предполагает увеличение степеней свободы объекта управления, усложнение системы автоматического управления. Одним из перспективныхнаправлений развития проекта видится задача управляемого смещ ения положения центра
масс объекта управления.
Для проверки разработанных подходов необходимо провести ряд экспериментов.
Постановка экспериментов является приоритетной задачей ближайшего развития проекта. В
частности, получение независимых объективных данных обеспечит внедрение в систему
дополнительных датчиков (например, видеокамеры).

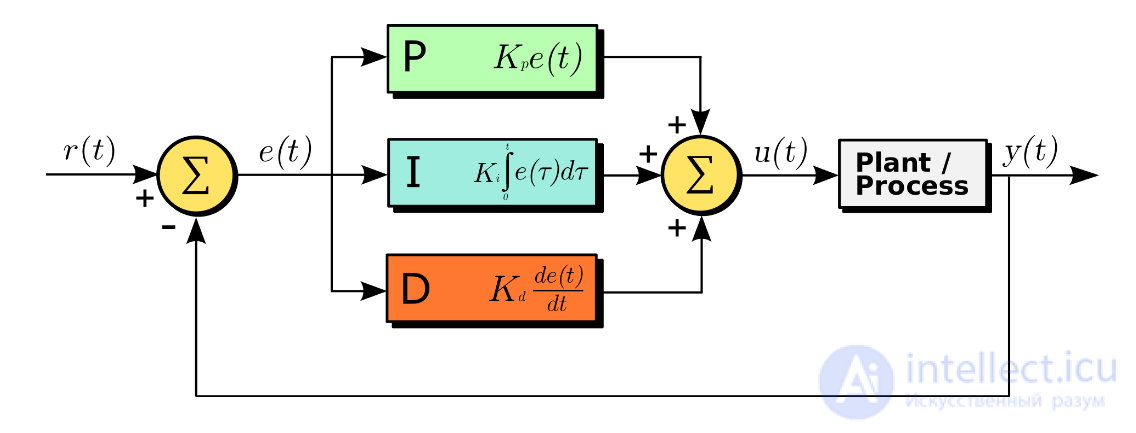
Схема, иллюстрирующая принцип работы ПИД-регулятора. Коэффициенты перед интегралом и производной опущены для большей наглядности иллюстрации.
Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трех слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегрирующим, пропорционально-дифференцирующим, пропорциональным и т. д.
Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен заданному значению, то выходной равен нулю.
Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к заданной, и система стабилизируется при мощности, равной тепловым потерям. Температура не может достичь заданного значения, так как в этом случае мощность нагревателя станет равна нулю, и он начнет остывать.
Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления при наличии задержек (запаздывания) в системе могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость.
Интегрирующая составляющая пропорциональна интегралу по времени от отклонения регулируемой величины. Ее используют для устранения статической ошибки. Она позволяет регулятору со временем учесть статическую ошибку.
Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечиваться интегрирующей составляющей. Тем не менее, интегрирующая составляющая также может приводить к автоколебаниям при неправильном выборе ее коэффициента.
Дифференцирующая составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему.
При использовании ПИД-регулятора в системе регулирования, следует учитывать нежелательные эффекты, возникающие при реализации канала производной сигнала ошибки έ(t). Недостатки проявляются из-за того, что при усилении этого канала прямо пропорционально возрастает частота. Основными недостатками при этом являются:
Теоретические методы анализа системы с ПИД-регулятором редко применяются на практике. Основная сложность практического применения — незнание характеристик объекта управления. Кроме того, существенную проблему представляют нелинейность и нестационарность системы. Практические регуляторы работают в ограниченном сверху и снизу диапазоне, поэтому в принципе нелинейны. В этой связи получили распространение методы экспериментальной настройки регулятора, подключенного к объекту управления. Прямое использование формируемой алгоритмом управляющей величины также имеет свою специфику. Например, при регулировке температуры часто управляют не одним, а двумя устройствами, одно из них управляет подачей горячего теплоносителя для нагрева, а другое управляет хладагентом для охлаждения. Часто рассматриваются три варианта практических регуляторов. В первом варианте, наиболее близком к теоретическому описанию, выход регулятора — непрерывная аналоговая ограниченная величина. Во втором случае выход представляет собой поток импульсов, который может управлять шаговым двигателем. В третьем случае выходной управляющий сигнал регулятора используется для широтно-импульсной модуляции.
В современных системах автоматизации, которые, как правило, строятся на базе PLC ПИД-регуляторы реализуются либо как специализированные аппаратные модули, включаемые в состав управляющего контроллера, либо программными методами, с применением специализированных библиотек. Производители контроллеров часто разрабатывают специализированное ПО (тюнеры) для настройки коэффициентов регулятора.
А как ты думаешь, при улучшении балансирующий робот, будет лучше нам? Надеюсь, что теперь ты понял что такое балансирующий робот, пид-регулятор и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Робототехника
Комментарии
Оставить комментарий
Робототехника
Термины: Робототехника