Лекция
Привет, Вы узнаете о том , что такое дискретно-детерминированные модели, Разберем основные их виды и особенности использования. Еще будет много подробных примеров и описаний. Для того чтобы лучше понимать что такое дискретно-детерминированные модели, f-схемы , настоятельно рекомендую прочитать все из категории Моделирование информационных систем.
Особенности дискретно-детерминированного подхода на этапе формализации процесса функционирования систем рассмотрим на примере использования в качестве математического аппарата теории автоматов. Теория автоматов — это раздел теоретической кибернетики, в котором изучаются математические модели — автоматы. На основе этой теории система представляется в
виде автомата, перерабатывающего дискретную информацию и меняющего
свои внутренние состояния лишь в допустимые моменты времени, Понятие
«автомат» варьируется в зависимости от характера конкретно изучаемых систем, от принятого уровня абстракции и целесообразной степени общности.
Автомат можно представить как некоторое устройство (черный ящик),
на которое подаются входные сигналы и снимаются выходные и которое может
иметь некоторые внутренние состояния. Конечным автоматом называется автомат, у которого множество внутренних состояний и входных сигналов (а,
следовательно, и множество выходных сигналов) являются конечными множествами.
Абстрактно конечный автомат (англ. finite automata) можно представить
как математическую схему (F-схему), характеризующуюся шестью элементами:
конечным множеством X входных сигналов (входным алфавитом); конечным
множеством Y выходных сигналов (выходным алфавитом); конечным множеством Z внутренних состояний (внутренним алфавитом или алфавитом состояний); начальным состоянием
z0 Z
; функцией переходов
z, x
; функцией выходов
z, x. Автомат, задаваемый F-схемой
– функционирует в дискретном автоматном времени, моментами которого являются такты, т.е., примыкающие друг к другу равные интервалы времени, каждому из которых соответствуют постоянные значения входного и вы-
ходного сигналов и внутренние состояния. Обозначим состояние, а также входной и выходной сигналы, соответствующие t-му такту при t=0, 1, 2, ..., через
zt, xt, yt. При этом
0 0
z z , zt Z , xt X , ytY .
Абстрактный конечный автомат имеет один входной и один выходной
каналы. В каждый момент t = 0, 1, 2, ... дискретного времени F-автомат находится в определенном состоянии
zt
, в начальный момент времени t=0 он всегда находится в начальном состоянии
0 0
z z
. В момент t, будучи в состоянии
zt, автомат способен воспринять на входном канале сигнал
xt X
и выдать на
выходном канале сигнал
yt zt, xt
, переходя в состояние
zt 1 zt, xt,
zt Z , ytY .
Абстрактный конечный автомат реализует некоторое отображение множества слов входного алфавита X на множество слов выходного алфавита Y.
Другими словами, если на вход конечного автомата, установленного в начальное состояние
0
z
, подавать в некоторой последовательности буквы входного
алфавита
x0, x1, x2,..., т. е. входное слово, то на выходе автомата будут последовательно появляться буквы выходного алфавита
y0, y1, y2,..., образуя
выходное слово.
Таким образом, работа конечного автомата происходит по следующей
схеме: в каждом t-м такте на вход автомата, находящегося в состоянии
zt
, подается некоторый сигнал
xt, на который он реагирует переходом в (t+1)-м такте в новое состояние
zt 1
и выдачей некоторого выходного сигнала. Сказанное выше можно описать следующими уравнениями: для F-автомата 1-ого
рода, называемого также автоматом Мили,
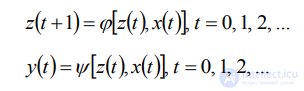
(10)
(11)
для автомата 2-ого рода


Автомат 2-ого рода, для которого
yt zt, t 0,1, 2, ...
(14)
т. е. функция выходов не зависит от входной переменной
xt, называется автоматом Мура.
Таким образом, уравнения (10) — (14), полностью задающие F-автомат,
являются частным случаем уравнений (3) – (4), когда система S детерминированная и на ее единственный вход поступает дискретный сигнал X.
По числу состояний различают конечные автоматы с памятью и без памяти. Автоматы с памятью имеют более одного состояния, а автоматы без –
обладают лишь одним состоянием.
По характеру отсчета дискретного времени конечные автоматы делятся
на синхронные и асинхронные. В синхронных F-aвmоматах моменты времени,
в которые автомат «считывает» входные сигналы, определяются принудительно синхронизирующими сигналами. После очередного синхронизирующего
сигнала с учетом «считанного» и в соответствии с уравнениями (10) — (14)
происходит переход в новое состояние и выдача сигнала на выходе, после чего
автомат может воспринимать следующее значение входного сигнала. Об этом говорит сайт https://intellect.icu . Таким
образом, реакция автомата на каждое значение входного сигнала заканчивается
за один такт, длительность которого определяется интервалом между соседними синхронизирующими сигналами. Асинхронный F-автомат считывает
входной сигнал непрерывно, и поэтому, реагируя на достаточно длинный входной сигнал постоянной величины х, он может несколько раз изменять состояние, выдавая соответствующее число выходных сигналов, пока не перейдет в
устойчивое, которое уже не может быть изменено данным входным сигналом.
Чтобы задать конечный F-автомат, необходимо описать все элементы
множества
0 F Z, X,Y,,,z , т. е. входной, внутренний и выходной алфавиты, а
также функции переходов и выходов, причем среди множества состояний необходимо выделить состояние
0
z , в котором автомат находился в момент времени
t=0. Существует несколько способов задания работы F-автоматов, но наиболее часто используются табличный, графический и матричный.
Простейший табличный способ задания конечного автомата основан на
использовании таблиц переходов и выходов, строки которых соответствуют
входным сигналам автомата, а столбцы — его состояниям. При этом обычно
первый слева столбец соответствует начальному состоянию
0
z . На пересечений
i- й строги и k-го столбца таблицы переходов помещается соответствующее
значение
k i z , x
функции переходов, а в таблице выходов — соответствующее
значение
k i z , x
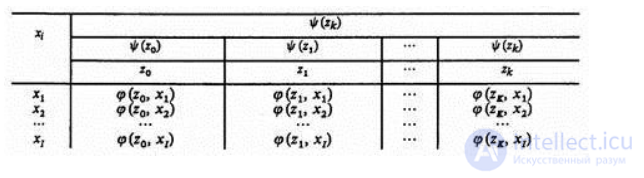
функции выходов. Для F-автомата Мура обе таблицы можно
совместить, получив так называемую отмеченную таблицу переходов, в которой над каждым состоянием
k
z
автомата, обозначающим столбец таблицы, стоит соответствующий этому состоянию, согласно (14), выходной сигнал
k z .
Описание работы F-автомата Мили таблицами переходов φ и выходов
ψ иллюстрируется табл. 1, а описание F-автомата Мура — таблицей переходов (табл. 2).
Табл. 1. Описание работы F-автомата Мили
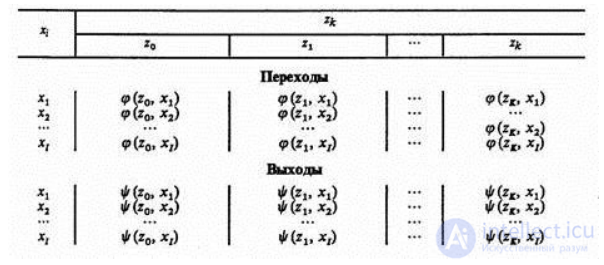
Табл. 2. Описание работы F-автомата Мура
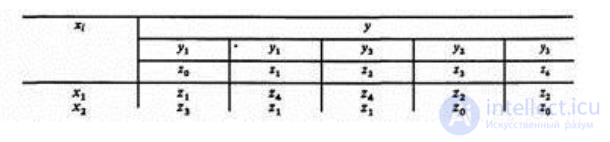
Пример. F-автомат Мили F1 с тремя состояниями, двумя входными и
двумя выходными сигналами приведен в табл. 3, а F-автомат Мура F2 — в табл. 4.
Табл. 3. F-автомат Мили F1

Табл. 4. F-автомат Мура F2
При другом способе задания конечного автомата используется понятие
направленного графа. Граф автомата представляет собой набор вершин, соответствующих различным состояниям автомата и соединяющих вершины дуг
графа, соответствующих тем или иным переходам автомата. Если входной сигнал
k
x
вызывает переход из состояния
i
z
, в состояние
j
z , то на графе автомата
дуга, соединяющая вершину
i
z
с вершиной
j
z
обозначается
k
x . Для того, чтобы
задать функцию выходов, дуги графа необходимо отметить соответствующими
выходными сигналами. Для автоматов Мили эта разметка производится так: если входной сигнал
k
x
действует на состояние
i
z , то, согласно сказанному, получается дуга, исходящая из
i
z
и помеченная
k
x
; эту дугу дополнительно отмечают выходной сигналом
i k
y z , x . Для автомата Мура аналогичная разметка
графа такова: если входной сигнал
k
x , действуя на некоторое состояние автомата, вызывает переход в состояние
j
z , то дугу, направленную в
j
z
и помеченную
k
x , дополнительно отмечают выходным сигналом
j k
y z , x .
На рис. 4 приведены заданные ранее таблицами Fавтоматы Мили F1 (а) и Мура
F2 (б) соответственно.
При решении задач моделирования систем часто более удобной формой является
матричное задание конечного
автомата. При этом матрица соединений автомата есть квадратная матрица
ij C c , строки которой соответствуют исходным состояниям, а столбцы – состояниям перехода. Элемент
s
k
ij
y
x
c , стоящий на пересечении i-й строки и j-го
столбца, в случае автомата Мили соответствует входному сигналу
k
x , вызывающему переход из состояния
i
z
в состояние
j
z , и выходному сигналу
s
y , выдаваемому при этом переходе. Если переход из состояния
i
z
в состояние
j
z
происходит под действием нескольких сигналов, элемент матрицы
ij c
представляет собой множество пар «вход-выход» для этого перехода, соединенных знаком дизъюнкции.
Для F-автомата Мура элемент
ij c
равен множеству входных сигналов
на переходе
i
z
и
j
z , а выход описывается вектором выходов
K
y z , z , ..., z 0 1
.
Необходимо отметить, что вообще на практике автоматы всегда являются асинхронными, а устойчивость их состояний обеспечивается, например, введением сигналов синхронизации. Однако на уровне абстрактной теории, когда
конечный автомат выступает в виде математической схемы для формализации
конкретных объектов без учета ряда второстепенных особенностей, удобным
оказывается оперировать с синхронными конечными автоматами.
Таким образом, понятие F-автомата в дискретно-детерминированном
подходе к исследованию на моделях свойств объектов является математической абстракцией, удобной для описания широкого класса процессов функционирования реальных объектов в автоматизированных системах обработки информации и управления.
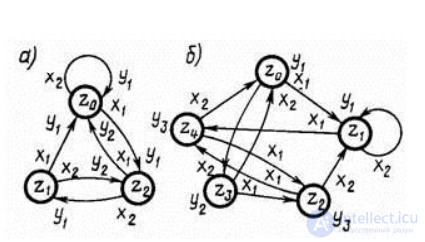
Рис. 4. F-автоматы Мили и Мура соответственно
В качестве таких объектов в первую очередь следует назвать
элементы и узлы ЭВМ, устройства контроля, регулирования и управления, системы временной и пространственной коммутации в технике обмена информацией и т. д. Для всех перечисленных объектов характерно наличие дискретных
состояний и дискретный характер работы во времени, т. е. их описание с помощью F-схем является эффективным. Но широта их применения не означает
универсальности этих математических схем. Например, этот подход непригоден для описания процессов принятия решений, процессов в динамических системах с наличием переходных процессов и стохастических элементов.
Рассмотрим особенности построения математических схем при дискретно-стохастическом подходе к формализации процесса функционирования
исследуемой системы S. Так как сущность дискретизации времени при этом
подходе остается аналогичной конечным автоматам, то влияние фактора стохастичности проследим также на разновидности таких автоматов, а именно на вероятностных (стохастических) автоматах.
В общем виде вероятностный автомат (англ. probabilistic automat)
можно определить как дискретный потактный преобразователь информации с
памятью, функционирование которого в каждом такте зависит только от состояния памяти в нем и может быть описано статистически.
Применение схем вероятностных автоматов (Р-схем) имеет важное значение для разработки методов проектирования дискретных систем, проявляющих статистически закономерное случайное поведение, для выяснения алгоритмических возможностей таких систем и обоснования границ целесообразности их использования, а также для решения задач синтеза по выбранному критерию дискретных стохастических систем, удовлетворяющих заданным ограничениям.
Введем математическое понятие Р-автомата, используя понятия, введенные для F-автомата. Рассмотрим множество G, элементами которого являются всевозможные пары
i s
x ,z . Если существуют две такие функции φ и ψ,
то с их помощью осуществляются отображения G→Z и G→Y, то говорят, что
F Z, X,Y,,
определяет автомат детерминированного типа.
Введем в рассмотрение более общую математическую схему. Пусть Ф
— множество всевозможных пар вида
k j
z , y . Потребуем, чтобы любой элемент
множества G индуцировал на множестве Ф некоторый закон распределения с
вероятностями
kj b
перехода автомата в состояние
k
z
и появления на выходе
j
y ,
если он находился в состоянии
s
z
и на его вход поступил сигнал
i
x
. При этом
справедливо
K
k
J
j
bkj
1 1
1.
Число таких распределений равно числу элементов множества G. Обозначим множество этих таблиц через В. Тогда четверка элементов
F Z, X,Y,B
называется вероятностным автоматом (Р-автоматом).
Пусть элементы множества G индуцируют некоторые законы распределения на подмножествах Y и Z, для которых
K
k
k
z
1
1
и
J
k
qk
1
1,
где
k
z , qk – вероятности перехода Р-автомата в состояние
k
z
и появления выходного сигнала
k
y
при условии, что P-автомат находился в состоянии
s
z
и на его вход поступил входной сигнал
i
x .
Если для всех k и j имеет место соотношение
k j bkj q z , то такой Равтомат называется вероятностным автоматом Мили. Это требование означает выполнение условия независимости распределений для нового состояния Равтомата и его выходного сигнала.
Пусть теперь определение выходного сигнала Р-автомата зависит
лишь от того состояния, в котором находится автомат в данном такте работы.
Другими словами, пусть каждый элемент выходного подмножества Y индуци-
рует распределение вероятностей выходов, для которых
1
1
I
i
i
s ,
i
s – вероятность появления выходного сигнала
i
y
при условии, что автомат находился в
состоянии
k
z .
Если для всех k и i имеет место соотношение
k i bki z s , то такой Равтомат называется вероятностным автоматом Мура. Понятие Равтоматов Мили и Мура введено по аналогии с детерминированным Fавтоматом, задаваемым
F Z, X,Y,, . Частным случаем Р-автомата, задаваемого как
F Z, X,Y,B , являются автоматы, у которых либо переход в новое
состояние, либо выходной сигнал определяются детерминировано. Если выходной сигнал Р-автомата определяется детерминировано, то такой автомат
называется Y-детерминированным вероятностным автоматом. Аналогично,
Z-детерминированным вероятностным автоматом называется Р-автомат, у
которого выбор нового состояния является детерминированным.
Исследование, описанное в статье про дискретно-детерминированные модели, подчеркивает ее значимость в современном мире. Надеюсь, что теперь ты понял что такое дискретно-детерминированные модели, f-схемы и для чего все это нужно, а если не понял, или есть замечания, то не стесняйся, пиши или спрашивай в комментариях, с удовольствием отвечу. Для того чтобы глубже понять настоятельно рекомендую изучить всю информацию из категории Моделирование информационных систем
Комментарии
Оставить комментарий
Моделирование информационных систем
Термины: Моделирование информационных систем